






基于Simulink的四轮转向功能开发:对4WS汽车的联合控制策略
在汽车行业中,四轮转向(4WS)技术已经成为提升车辆操控性和稳定性的重要手段。本文将探讨基于Simulink开发的四轮转向功能,特别是采用零质心侧偏角前馈控制器和横摆角速度PID反馈控制器的联合控制策略,并对该策略在某款4WS汽车中的应用进行详细分析。
一、四轮转向概述
四轮转向允许汽车的前轮和后轮都进行转向操作,这为车辆提供了更高的灵活性和稳定性。通过精确控制每个车轮的转向角度,可以显著改善车辆的操控性能和响应速度。
二、控制策略介绍
-
零质心侧偏角前馈控制器:此控制器根据车辆的当前状态(如车速、转向角度等)计算出一个理想的质心侧偏角,并将其作为前馈控制的输入。零质心侧偏角意味着车辆在行驶过程中能够保持最佳的稳定性。
-
横摆角速度PID反馈控制器:PID(比例-积分-微分)反馈控制器根据车辆的实时横摆角速度与期望值的差异,通过调整后轮的转向角度来纠正车辆的横摆运动。这种反馈控制有助于车辆在高速行驶时保持稳定的横摆状态。
三、Simulink模型架构
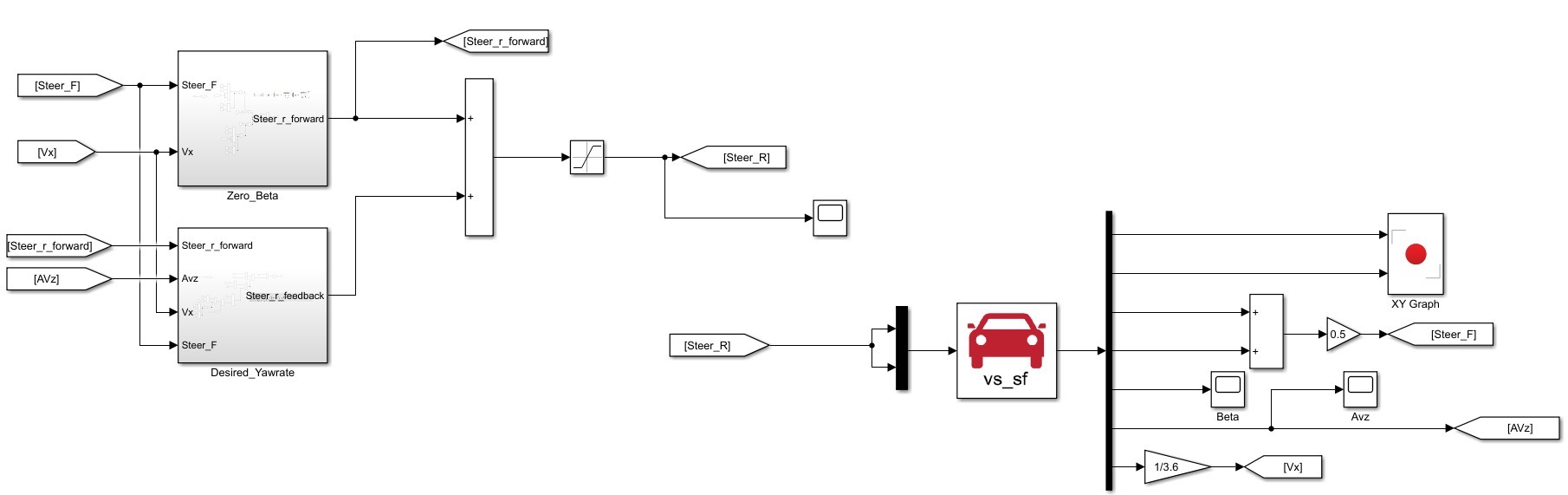
模型的架构包括零质心侧偏角前馈控制器和横摆角速度PID反馈控制器。整体Simulink模型图展示了各控制模块之间的连接关系和交互方式。通过该模型,可以实现对四轮转向的精确控制和仿真分析。
四、联合仿真实验与分析
利用CarSim与MATLAB Simulink分别搭建了4WS整车模型和控制算法模型,并在双移线工况下进行了联合仿真实验。实验结果显示,在不同车速下,采用四轮转向联合控制策略的汽车在质心侧偏角和横摆角速度方面表现出更好的性能。与前轮转向和零质心侧偏角前馈控制方式相比,联合控制策略能够明显提高汽车的操纵稳定性。
五、仿真结果分析图示
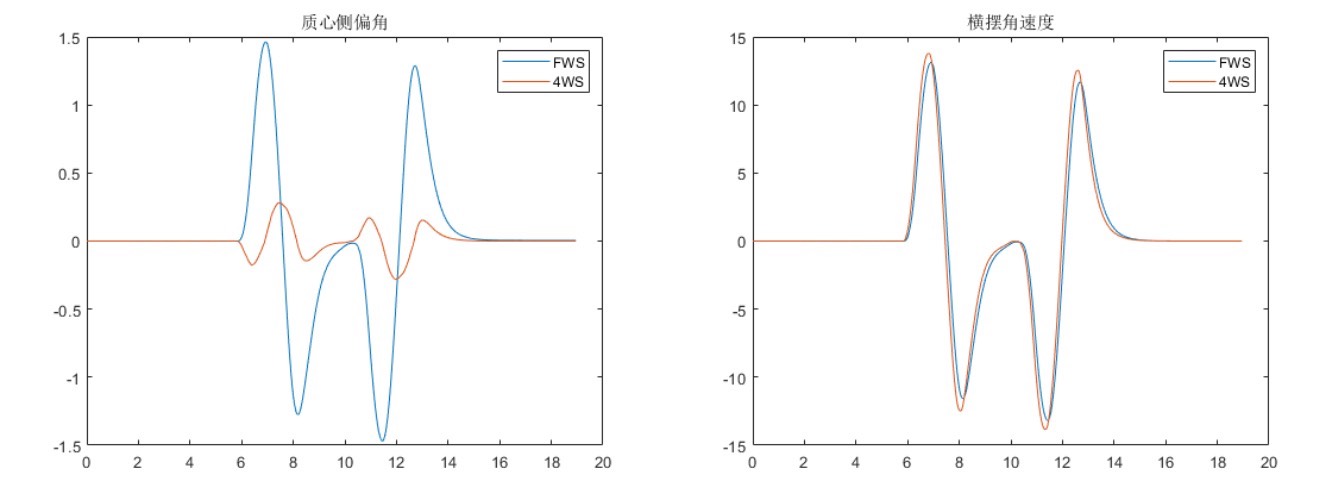
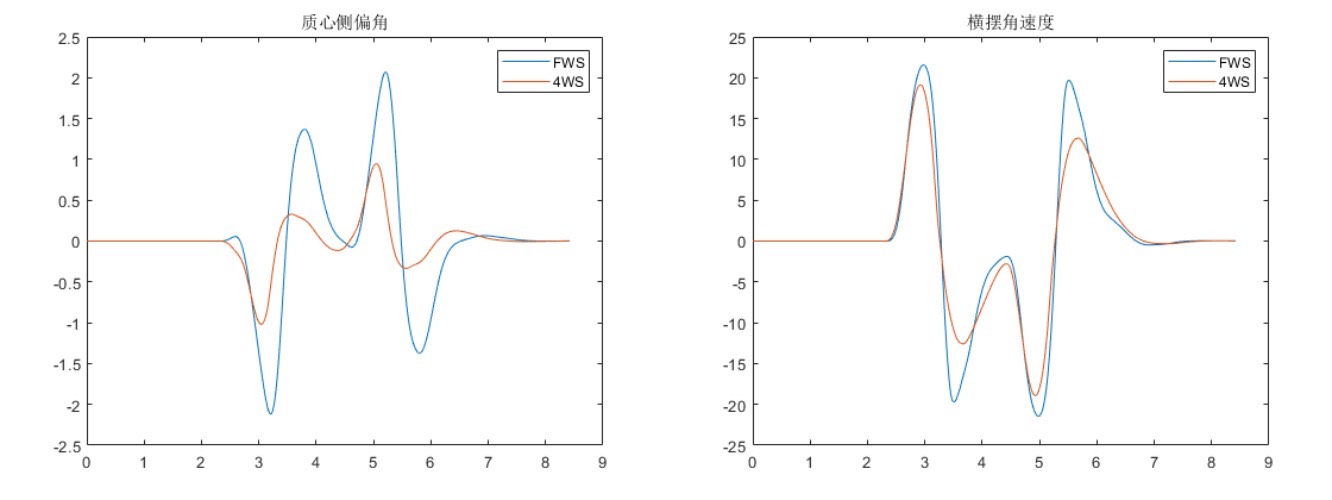
图1展示了整体Simulink模型,有助于理解各控制模块的相互关系。图2和图3分别展示了40 kph和90 kph双移线工况下质心侧偏角(Beta)和横摆角速度(AVz)的变化情况。通过这些图示,可以清晰地看到采用四轮转向联合控制策略的车辆在这些指标上表现出更好的性能。
六、结论与展望
本文通过对基于Simulink开发的四轮转向功能进行详细分析,证明了采用零质心侧偏角前馈控制器和横摆角速度PID反馈控制器的联合控制策略能够显著提高汽车的操纵稳定性和综合控制效果。未来,随着四轮转向技术的进一步发展,相信会有更多先进的控制策略被应用于实际车辆中,为驾驶者提供更加安全、舒适的驾驶体验。
基于Simulink开发的四轮转向功能
采用零质心侧偏角前馈控制器和横摆角速度PID反馈控制器,对某4WS汽车后轮进行前馈-反馈联合控制。
利用CarSim与MATLAB/Simulink分别搭建了4WS整车模型和控制算法模型。
并在双移线工况下对4WS汽车进行了联合仿真实验,分析质心侧偏角和横摆角速度变化。
结果表明:与前轮转向和零质心侧偏角前馈控制方式相比,4WS联合控制策略能明显提高不同车速下的汽车操纵稳定性,综合控制效果较好。
模型架构包括零质心侧偏角前馈控制器,横摆角速度模糊PID反馈控制器
图1:整体Simulink模型;
图2:40 kph双移线工况下Beta与AVz;
图3:90 kph双移线工况下Beta与AVz;
图4:所有文件截图。


















 8866
8866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









