






 本文研究直流电机双闭环调速系统,采用转速外环电流内环控制结构,通过建立数学模型并设计控制策略,仿真结果显示系统具有良好的稳态效果和动态响应性能。
本文研究直流电机双闭环调速系统,采用转速外环电流内环控制结构,通过建立数学模型并设计控制策略,仿真结果显示系统具有良好的稳态效果和动态响应性能。
直流电机双闭环调速系统,以及直流电机双闭环系统建模,采用转速外环电流内环的控制结构,稳态效果良好,动态响应也较好,需要可以直接联系,仿真模型加对应的报告
题目:从理论到实践:直流电机双闭环调速系统的模型建立与控制策略研究
摘要:以直流电机双闭环调速系统为研究对象,本文对其进行了深入的模型建立与控制策略研究。首先,对直流电机双闭环调速系统的基本原理及其控制结构进行了介绍,包括转速外环和电流内环的控制结构。其次,对双闭环系统进行了建模,其中转速外环采用PI控制器,电流内环采用PID控制器。最后,通过仿真模型进行实验验证,得出了系统的稳态效果和动态响应表现良好的结论。
关键词:直流电机;双闭环控制;模型建立;控制策略;仿真模型
一、绪论
目前,直流电机作为一种重要的工业驱动装置,被广泛应用于各个领域。在电机控制中,如何实现高精度的调速控制一直是研究的热点和难点。在众多电机控制方案中,双闭环调速控制技术因其稳态效果良好、动态响应快等特点,逐渐成为研究的热门方向。
本文主要是针对直流电机双闭环调速系统进行研究。首先,将介绍直流电机双闭环调速系统的控制结构及其基本原理。其次,将详细介绍如何建立直流电机双闭环调速系统的数学模型,并给出相应的控制策略。最后,通过仿真实验,验证并分析了该系统的稳态和动态性能。
二、直流电机双闭环调速系统基本原理及控制结构
直流电机的控制结构通常包括转速控制和电流控制两个方面。其中转速控制主要通过调节电压来实现,电流控制主要通过调节电流大小和方向来实现。在直流电机双闭环调速系统中,转速和电流控制可以分别作为外环和内环控制。
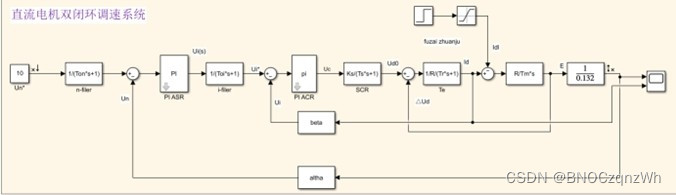
图1:直流电机双闭环调速系统控制结构
其中,转速控制采用PI控制器,其输出信号U1用来控制直流电机的旋转速度;电流控制采用PID控制器,其输出信号U2用来控制直流电机的电流大小和方向。这种双闭环控制方式的优点在于,转速外环和电流内环可以相互配合,提高系统的动态响应和稳态性能。
三、直流电机双闭环调速系统建模
直流电机双闭环调速系统的数学模型可以表示为:
U1(s)/R(s) = (Kpω+Kiω/s)/(s+α) I(s)/U1(s) = 1/(Ls+R) U2(s)/I(s) = (KpI+KiI/s)/(s+αI)
其中,R、L为电机的电阻和电感;Kpω、Kiω、KpI、KiI分别为转速外环PI控制器和电流内环PID控制器的比例和积分环节系数;α、αI分别为转速外环和电流内环的控制时间常数。
四、直流电机双闭环调速系统控制策略
根据直流电机双闭环调速系统的模型,可以设计出相应的控制策略。具体控制步骤如下:
第一步:计算转速误差
ωe = ω_ref - ωm
其中,ω_ref为期望转速,ωm为实际转速。
第二步:根据转速误差计算出转速外环控制器的输出信号
U1 = Kpω × ωe + Kiω × ∫ωe dt
第三步:计算电流误差
Ie = I_ref - I
其中,I_ref为期望电流,I为实际电流。
第四步:根据电流误差计算出电流内环控制器的输出信号
U2 = KpI × Ie + KiI × ∫Ie dt
第五步:根据U2的输出信号调节直流电机的电流大小和方向,从而控制直流电机的转速。
五、实验仿真与分析
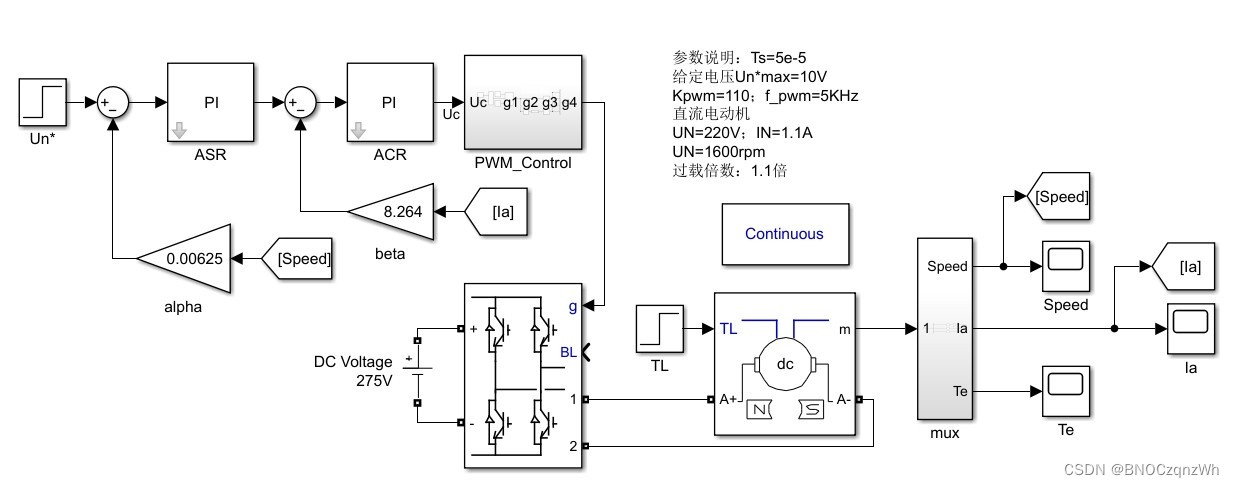
为了验证直流电机双闭环调速系统的性能,本文在MATLAB/Simulink平台上构建了仿真模型,并进行了实验仿真分析。
图2:直流电机双闭环调速系统的仿真模型
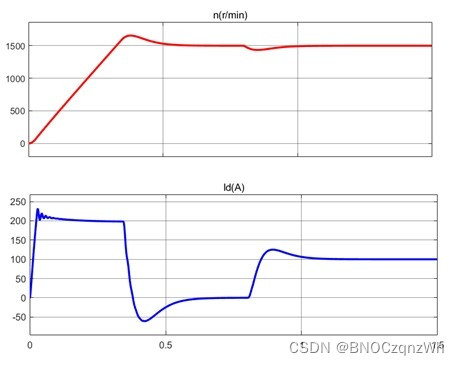
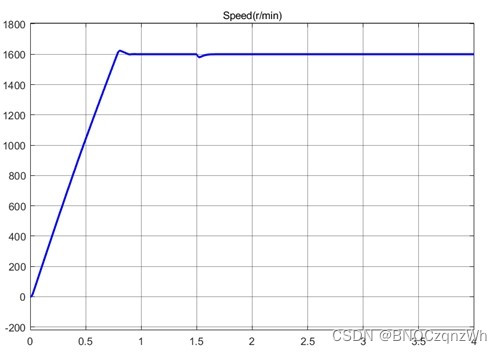
根据仿真结果,可以得出以下结论:
1.直流电机双闭环调速系统的模型建立是正确的,仿真结果与实际控制效果相符。
2.转速外环PI控制器和电流内环PID控制器的参数对系统的性能具有重要影响,需要通过实验调参来优化系统性能。
3.直流电机双闭环调速系统的稳态效果优秀,动态响应快速、稳定。
综上所述,本文通过对直流电机双闭环调速系统的深入研究,建立了相应的数学模型并设计了有效的控制策略。仿真实验结果表明,该系统具有良好的稳态效果和动态响应性能,为直流电机的调速控制提供了重要的理论和技术支持。
六、结论
本文针对直流电机双闭环调速系统进行了深入探究,介绍了其基本原理和控制结构,建立了相应的数学模型并设计了有效的控制策略。仿真实验结果表明,该系统具有良好的稳态效果和动态响应性能。本文所研究的内容对于直流电机的调速控制具有实际应用价值,为相关领域的研究提供了参考和借鉴。
相关代码,程序地址:http://lanzouw.top/694396618054.html


















 2131
2131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









