






大家好,我是老周。我们会不定期整理一级市场中优质的分享给大家,如果你觉得二级市场风险大,不妨尝试下一级市场。
随着一级市场越来越火热,很多人只是听说却不知怎么去参与,完全不知道一级市场的存在。现在市场不好,好多币友都开始转战一级市场。

项目介绍:
Astar Network (由Plasm Network改名而来),相比之前介绍过的平行链Moonbeam:是以接入以太坊生态DAPPs进入波卡生态为愿景;而Astar(Shiden)则有更大的野心:旨在成为多链条生态的DAPP中心枢纽,同时让web3可扩展。
项目亮点:
Astar(Shiden)是一个智能合约平台,用于承载波卡生态DAPPs的运行;
具有以太坊EVM虚拟机和前沿WASM虚拟机兼容性;
设计了多链系统,也通过桥链接以太坊、Cosmos等其他区块链生态;
具有较好的拓展性,支持Optimistic Rollups和ZK Rollups。
投资团队:
单看披露的情况,团队比较年轻,依旧没有币圈知名IP。但融资信息中第一轮由Binance Labs(币安孵化器)领投、第二轮融资又由分布式资本领投,两轮均有整个币圈生态中较大IP的参与。其中也不乏其他知名投资机构,如IOSG、AU21等。
代币分配:
由于SDN代币的发行机制比较特殊:因为Astar(Plasm)之前做过Lockdrop,锁定了大约15万枚ETH,每一轮的比例不同,且选择锁仓的时间也会得到不同数量的代币。
附:即将到来的Astar的官宣代币分配情况。
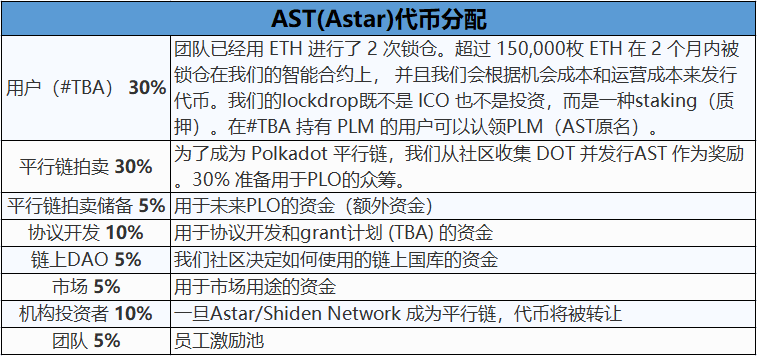
是Astar的代币AST的总量还没有进行公示,是因为进行了2轮ETH的锁仓空投,当初团队并没有对代币总供应量做出上限说明,团队需要考虑到基金会预留和早期参与者的比例进行分配,预计团队会在Polkadot平行链开始拍卖的时候公布
总结:
目前来看我们比较认同Astar(Shiden)的设计理念,即从上线初期就考虑长远的扩容计划,也对DAPP质押的模型表示看好,但AST及SDN设计的流通模型和前面已完成的两期Lockdrop空投,导致其代币上线后流通量较大;且空投、众贷、投资者均没有锁仓机制,均不利于二级市场币价。波动科技团队觉得上线后会出现较大的抛压,不看好SDN代币初期二级市场表现,当然其生态运营能力如果极强就可以修正这些不利影响。智能合约平台是波卡生态的刚需,具体谁能胜出,我们会保持长期的跟踪。
鲁迅先生曾说:人一旦有钱,智商和情商都会提高86.4%,烦恼也会消失100%。但问题来了,钱从哪里来,他并没有说,只留下一串数字BTC504。莎士比亚说这个世界上只有少数人能把握住这串数字走向财富自由。
德纳社区成立于2018年5月,是一支专注于区块链一级市场金融项目投资孵化的机构,拥有千万级别的一级市场投资基金,并与币圈多个币圈头部资本达成战略合作。德纳致力于发现、投资并孵化更多具有潜力价值的项目,从而推动赋能行业进步和应用落地,进一步建立投资生态,全面联合各个领域的资源,帮助项目更好地发展。
2022年,德纳社区将继续与你同行,共创美好未来!















 390
390











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









