






Android 开源项目简介
Android 是一个适用于移动设备的开源操作系统,也是由 Google 主导的对应开源项目。此网站和 Android 开源项目 (AOSP) 代码库可为您提供所需信息和源代码,供您创建定制的 Android OS 版本,将设备和配件移植到 Android 平台,同时确保设备符合兼容性要求,从而让 Android 生态系统维持良好稳健的运行环境,以便更好地服务于数百万用户。
作为一个开源项目,Android 的目标是避免出现任何集中瓶颈,即没有任何行业参与者可一手限制或控制其他任何参与者的创新。为此,Android 被打造成了一个适用于消费类产品的完整高品质操作系统,并配有可自定义并运用到几乎所有设备的源代码,以及所有用户均可访问的公开文档(英文网址:source.android.com;简体中文网址:source.android.google.cn)。
正如您可以为 AOSP 贡献代码一样,您也可以为 AOSP 文档“添砖加瓦”,而且我们非常欢迎您提供宝贵意见!Android 的灵活性和不断变化的代码库意味着,此网站要想提供准确且与 Android 实现者息息相关的最新内容,离不开您的反馈。我们建议您查看更新日志,详细了解 AOSP 的最新动态,并使用每个页面底部的网站反馈(或通过访问 g.co/androidsourceissue)来报告 bug 或提供建议。
以上内容来自于 https://source.android.google.cn/?hl=zh-cn
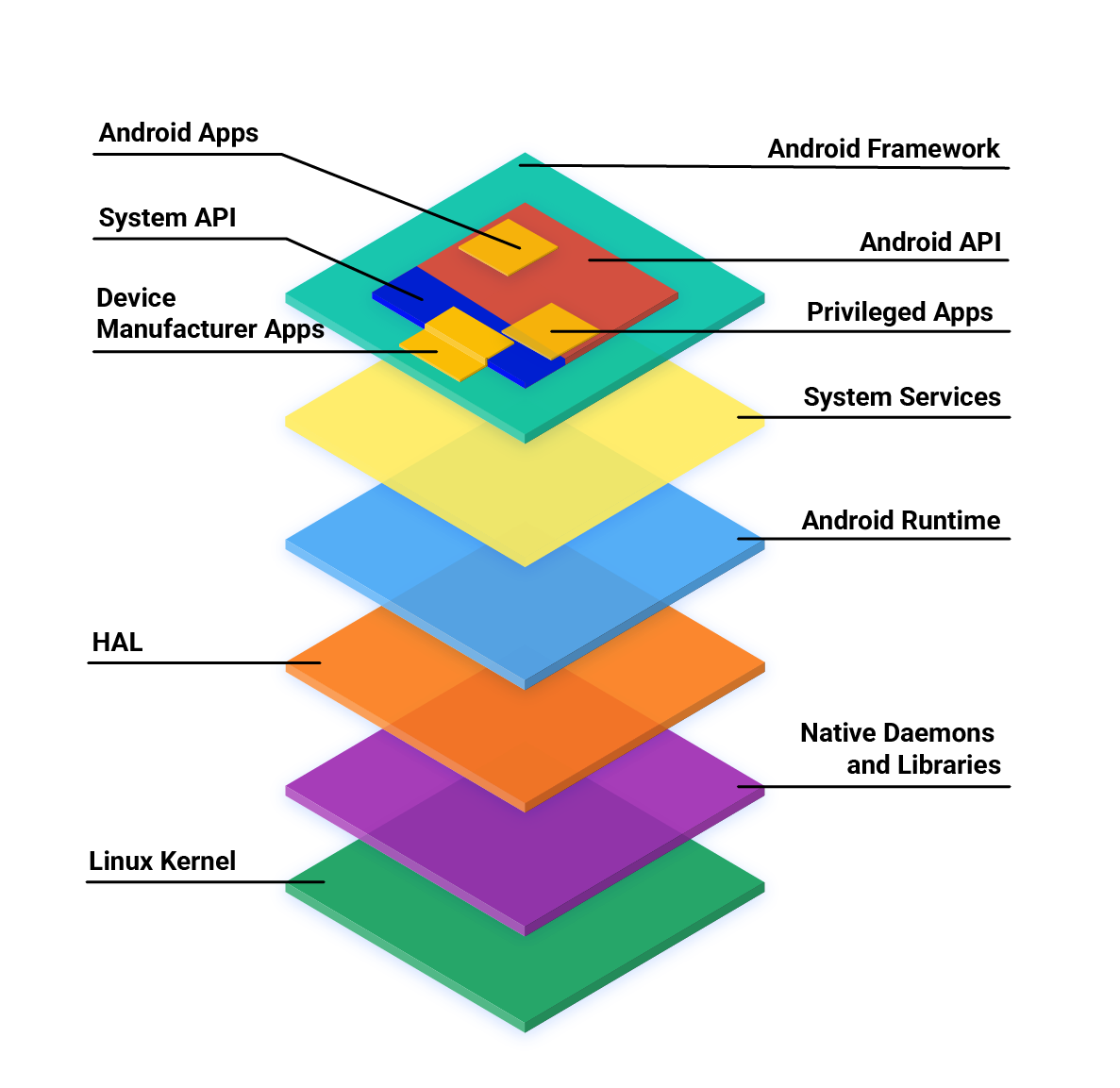
图中内容可参考:https://source.android.google.cn/docs/core/architecture?hl=zh-cn
该文档是根据Android R代码进行CameraService服务启动流程介绍,在此之前先对android系统启动流程大概的了解一下。详情可以参考以下链接。 参考链接:
https://www.jianshu.com/p/3999842b7361
https://blog.csdn.net/yuanqiyuanluo2014/article/details/128041889
一、服务启动文件
cameraserver.rc
service cameraserver /system/bin/cameraserver // 该部分定义了一个名为cameraserver的服务,他的可执行文件路径为system/bin/cameraserver
class main // 类别为main
user cameraserver // 在执行此服务之前,请更改为“cameraserver ”
group audio camera input drmrpc // 在执行此服务之前,请更改为“groupname”。除了(必需的)第一个之外的其他组名用于设置进程的补充组(通过setgroups())。
ioprio rt 4 // 通过ioprioset系统调用,为该服务设置IO优先级类别和IO优先级
task_profiles CameraServiceCapacity MaxPerformance // 设置任务配置文件。在安卓U之前,配置文件应用于服务的主线程。对于Android U及更高版本,配置文件将应用于整个服务过程。这是为了取代使用writepid选项将进程移动到cgroup中。
rlimit rtprio 10 10 // 他的将给定的rlimit应用于服务。rlimit由子进程继承,因此这将有效地将给定的rlimit应用于此服务启动的进程树。它的解析类似于下面指定的setrlimit命令。
rc文件语法参考文档路径 :
code\system\core\init\README.md
android系统启动init进程后,在init进程中会通过cameraserver.rc启动cameraserver进程;从frameworks\av\camera\cameraserver\Android.bp文件可以确认,cameraserver进程启动后会调用main_cameraserver.cpp中的main函数。
frameworks\av\camera\cameraserver\Android.bp
cc_binary {
name: "cameraserver",
srcs: ["main_cameraserver.cpp"],
header_libs: [
"libmedia_headers",
],
shared_libs: [
"libcameraservice",
"liblog",
"libutils",
"libui",
"libgui",
"libbinder",
"libhidlbase",
"android.hardware.camera.common@1.0",
"android.hardware.camera.provider@2.4",
"android.hardware.camera.provider@2.5",
"android.hardware.camera.provider@2.6",
"android.hardware.camera.provider@2.7",
"android.hardware.camera.device@1.0",
"android.hardware.camera.device@3.2",
"android.hardware.camera.device@3.4",
],
compile_multilib: "first",
cflags: [
"-Wall",
"-Wextra",
"-Werror",
"-Wno-unused-parameter",
],
init_rc: ["cameraserver.rc"],
vintf_fragments: [
"manifest_android.frameworks.cameraservice.service@2.2.xml",
],
}
frameworks\av\camera\cameraserver\main_cameraserver.cpp
在main_cameraserver.cpp中,主要介绍CameraService::instantiate();
1. main_cameraserver.cpp源码
#include "CameraService.h"
#include <hidl/HidlTransportSupport.h>
using namespace android;
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
// Set 5 threads for HIDL calls. Now cameraserver will serve HIDL calls in
// addition to consuming them from the Camera HAL as well.
hardware::configureRpcThreadpool(5, /*willjoin*/ false);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
CameraService::instantiate();
ALOGI("ServiceManager: %p done instantiate", sm.get());
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
2.CameraService类关系图及其instantiate方法流程
2.1 CameraService类关系图及其相关类路径
| 文件路径 | class name |
|---|---|
| \frameworks\native\libs\binder\include\binder\BinderService.h | template <typename SERVICE> class BinderService |
| \frameworks\native\libs\binder\include\binder\IBinder.h | IBinder::DeathRecipient |
| \frameworks\av\services\camera\libcameraservice\common\CameraProviderManager.h | CameraProviderManager::StatusListener |
| \frameworks\av\camera\aidl\android\hardware\ICameraService.aidl | ::android::hardware::BnCameraService |
在上述的表和图中,CameraService继承了BnCameraService,DeathRecipient,StatusListener,BinderService<CameraService>四个类, 其中继承的第四个类是以CameraService类为模板的BinderService类。BinderService类中包含了静态方法instantiate。
2.2 BinderService类源码
template<typename SERVICE>
class BinderService
{
public:
static status_t publish(bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(String16(SERVICE::getServiceName()), new SERVICE(), allowIsolated,
dumpFlags);
}
static void publishAndJoinThreadPool(
bool allowIsolated = false,
int dumpFlags = IServiceManager::DUMP_FLAG_PRIORITY_DEFAULT) {
publish(allowIsolated, dumpFlags);
joinThreadPool();
}
static void instantiate() { publish(); }
static status_t shutdown() { return NO_ERROR; }
private:
static void joinThreadPool() {
sp<ProcessState> ps(ProcessState::self());
ps->startThreadPool();
ps->giveThreadPoolName();
IPCThreadState::self()->joinThreadPool();
}
};
BinderService的类设计比较简单,包含了四个公有的静态方法publish、publishAndJoinThreadPool、instantiate、shutdown和一个私有的静态方法joinThreadPool。
2.3 main_cameraserver中main函数的简单流程
以下是main_cameraserver中main函数的基本流程, 该流程会添加media.camera服务到系统服务中。同时在函数传参的时候,存在CameraService的sp引用,因此,在参数传递的过程中会调用CameraService中的onFirstRef函数,做camerasrver服务的初始化操作。然后调用到IServiceManager中的addService把media.camera服务添加到系统服务中。
status_t ServiceManagerShim::addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated, int dumpsysPriority)
{
Status status = mTheRealServiceManager->addService(
String8(name).c_str(), service, allowIsolated, dumpsysPriority);
return status.exceptionCode();
}
以下是cameraserver服务启动的基本流程:
二、CameraService服务初始化及其onFirstRef流程
1.onFirstRef调用流程及源码
1.1 onFirstRef调起流程
在上一节的中的2.3小节中有提过参数传递的过程中会调用CameraService中的onFirstRef函数,接下来让我们一起看下onFirstRef调用的流程。
\system\core\libutils\RefBase.cpp
\system\core\libutils\include\utils\RefBase.h
在RefBase类中,在incStrong的方法中会调用onFirstRef函数,而incStrong的方法是StrongPointer.h中sp初始化话的时候会调用。所以在BinderService类中的publish方法中函数中调用addService函数时,创建CameraService对象并赋值给sp<IBinder> & service;在赋值的过程中会调用到incStrong方法,同时,由于CameraService会继承RefBase类,所以在调用onFirstRef时会调用到CameraService中的onFirstRef函数, 开始初始化话CameraService服务。
void RefBase::onFirstRef()
{
}
void RefBase::incStrong(const void* id) const
{
weakref_impl* const refs = mRefs;
refs->incWeak(id);
refs->addStrongRef(id);
const int32_t c = refs->mStrong.fetch_add(1, std::memory_order_relaxed);
ALOG_ASSERT(c > 0, "incStrong() called on %p after last strong ref", refs);
#if PRINT_REFS
ALOGD("incStrong of %p from %p: cnt=%d\n", this, id, c);
#endif
if (c != INITIAL_STRONG_VALUE) {
return;
}
check_not_on_stack(this);
int32_t old __unused = refs->mStrong.fetch_sub(INITIAL_STRONG_VALUE, std::memory_order_relaxed);
// A decStrong() must still happen after us.
ALOG_ASSERT(old > INITIAL_STRONG_VALUE, "0x%x too small", old);
refs->mBase->onFirstRef();
}
code\system\core\libutils\include\utils\StrongPointer.h
incStrong的调用一般是在首次对象首次引用的时候会调用一次, 后续不会调用。
template <typename T>
sp<T>& sp<T>::operator=(T* other) {
T* oldPtr(*const_cast<T* volatile*>(&m_ptr));
if (other) {
other->incStrong(this);
}
if (oldPtr) oldPtr->decStrong(this);
if (oldPtr != *const_cast<T* volatile*>(&m_ptr)) sp_report_race();
m_ptr = other;
return *this;
}
1.2 CameraService onFirstRef函数源码
onFirstRef函数中, 主要是枚举设备enumerateProviders,UidPolicy的创建及注册和SensorPrivacyPolicy的创建及注册;其中最重要的是枚举设备的流程。
void CameraService::onFirstRef()
{
ALOGI("CameraService process starting");
BnCameraService::onFirstRef();
// Update battery life tracking if service is restarting
BatteryNotifier& notifier(BatteryNotifier::getInstance());
notifier.noteResetCamera();
notifier.noteResetFlashlight();
status_t res = INVALID_OPERATION;
res = enumerateProviders();
if (res == OK) {
mInitialized = true;
}
mUidPolicy = new UidPolicy(this);
mUidPolicy->registerSelf();
mSensorPrivacyPolicy = new SensorPrivacyPolicy(this);
mSensorPrivacyPolicy->registerSelf();
mInjectionStatusListener = new InjectionStatusListener(this);
mAppOps.setCameraAudioRestriction(mAudioRestriction);
sp<HidlCameraService> hcs = HidlCameraService::getInstance(this);
if (hcs->registerAsService() != android::OK) {
ALOGE("%s: Failed to register default android.frameworks.cameraservice.service@1.0",
__FUNCTION__);
}
// This needs to be last call in this function, so that it's as close to
// ServiceManager::addService() as possible.
CameraServiceProxyWrapper::pingCameraServiceProxy();
ALOGI("CameraService pinged cameraservice proxy");
}
2. CameraService服务初始化
2.1 枚举设备enumerateProviders
枚举设备的过程中先获取mServiceLock, 防止其他资源访问;在获取到锁资源时,首先对会创建CameraProviderManager对象并初始化,初始化后会设置vendorTags(相机静态能力),然后创建CameraFlashlight对象,最后通过初始化完成的CameraProvidermanager对象获取CameraID;获取cameraid后释放mServiceLock。
上报camera id到框架测,然后通过配置的ro.odm.build.media_performance_class决定是否需要过滤相机参数信息(过滤时依需获取mServiceLock锁资源)。
status_t CameraService::enumerateProviders() {
status_t res;
std::vector<std::string> deviceIds;
{
Mutex::Autolock l(mServiceLock);
if (nullptr == mCameraProviderManager.get()) { // 首次创建及初始化
mCameraProviderManager = new CameraProviderManager();
res = mCameraProviderManager->initialize(this); // this传入作为回调
if (res != OK) {
ALOGE("%s: Unable to initialize camera provider manager: %s (%d)",
__FUNCTION__, strerror(-res), res);
logServiceError(String8::format("Unable to initialize camera provider manager"),
ERROR_DISCONNECTED);
return res;
}
}
// Setup vendor tags before we call get_camera_info the first time
// because HAL might need to setup static vendor keys in get_camera_info
// TODO: maybe put this into CameraProviderManager::initialize()?
mCameraProviderManager->setUpVendorTags();
if (nullptr == mFlashlight.get()) { // 首次创建CameraFlashlight
mFlashlight = new CameraFlashlight(mCameraProviderManager, this);
}
res = mFlashlight->findFlashUnits();
if (res != OK) {
ALOGE("Failed to enumerate flash units: %s (%d)", strerror(-res), res);
}
deviceIds = mCameraProviderManager->getCameraDeviceIds(); // 获取camera id
}
for (auto& cameraId : deviceIds) { // 遍历cameraId并通知到java框架测
String8 id8 = String8(cameraId.c_str());
if (getCameraState(id8) == nullptr) {
onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);
}
}
// Derive primary rear/front cameras, and filter their charactierstics.
// This needs to be done after all cameras are enumerated and camera ids are sorted.
if (SessionConfigurationUtils::IS_PERF_CLASS) { // 判断设置的media_performance_class,满足条件则过滤相机的参数
// Assume internal cameras are advertised from the same
// provider. If multiple providers are registered at different time,
// and each provider contains multiple internal color cameras, the current
// logic may filter the characteristics of more than one front/rear color
// cameras.
Mutex::Autolock l(mServiceLock);
filterSPerfClassCharacteristicsLocked();
}
return OK;
}
2.2 CameraProviderManager创建及初始化
- CameraProviderManager中没有构造函数,使用默认构造函数
mCameraProviderManager = new CameraProviderManager();
- CameraProviderManager的初始化
res = mCameraProviderManager->initialize(this);
CameraProviderManager初始化源码如下:
主要分为两步,第一步是注册服务registerForNotifications,第二步是添加provider的addProviderLocked函数。现主要对第二步添加provider进行分析。
static HardwareServiceInteractionProxy sHardwareServiceInteractionProxy;
...
/**
* Initialize the manager and give it a status listener; optionally accepts a service
* interaction proxy.
*
* The default proxy communicates via the hardware service manager; alternate proxies can be
* used for testing. The lifetime of the proxy must exceed the lifetime of the manager.
*/
status_t initialize(wp<StatusListener> listener,
ServiceInteractionProxy *proxy = &sHardwareServiceInteractionProxy);
CameraProviderManager::sHardwareServiceInteractionProxy{};
...
status_t CameraProviderManager::initialize(wp<CameraProviderManager::StatusListener> listener,
ServiceInteractionProxy* proxy) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
if (proxy == nullptr) {
ALOGE("%s: No valid service interaction proxy provided", __FUNCTION__);
return BAD_VALUE;
}
mListener = listener;
mServiceProxy = proxy;
mDeviceState = static_cast<hardware::hidl_bitfield<provider::V2_5::DeviceState>>(
provider::V2_5::DeviceState::NORMAL);
// Registering will trigger notifications for all already-known providers
bool success = mServiceProxy->registerForNotifications(
/* instance name, empty means no filter */ "",
this);
if (!success) {
ALOGE("%s: Unable to register with hardware service manager for notifications "
"about camera providers", __FUNCTION__);
return INVALID_OPERATION;
}
for (const auto& instance : mServiceProxy->listServices()) {
this->addProviderLocked(instance);
}
IPCThreadState::self()->flushCommands();
return OK;
}
addProviderLocked函数源码如下:
status_t CameraProviderManager::addProviderLocked(const std::string& newProvider,
bool preexisting) {
// Several camera provider instances can be temporarily present.
// Defer initialization of a new instance until the older instance is properly removed.
auto providerInstance = newProvider + "-" + std::to_string(mProviderInstanceId);
bool providerPresent = false;
for (const auto& providerInfo : mProviders) { // 首次初始化的时候,mProviders为空
if (providerInfo->mProviderName == newProvider) {
ALOGW("%s: Camera provider HAL with name '%s' already registered",
__FUNCTION__, newProvider.c_str());
if (preexisting) {
return ALREADY_EXISTS;
} else{
ALOGW("%s: The new provider instance will get initialized immediately after the"
" currently present instance is removed!", __FUNCTION__);
providerPresent = true;
break;
}
}
}
sp<ProviderInfo> providerInfo = new ProviderInfo(newProvider, providerInstance, this);
if (!providerPresent) {
status_t res = tryToInitializeProviderLocked(newProvider, providerInfo);
if (res != OK) {
return res;
}
}
mProviders.push_back(providerInfo); // mProviders初始化
mProviderInstanceId++;
return OK;
}
根据源码分析,addProviderLocked时会先创建providerInfo, 然后根据provider name和providerInfo调用tryToInitializeProviderLocked初始化provider。tryToInitializeProviderLocked源码如下:
status_t CameraProviderManager::tryToInitializeProviderLocked(
const std::string& providerName, const sp<ProviderInfo>& providerInfo) {
sp<provider::V2_4::ICameraProvider> interface;
interface = mServiceProxy->tryGetService(providerName);
if (interface == nullptr) {
// The interface may not be started yet. In that case, this is not a
// fatal error.
ALOGW("%s: Camera provider HAL '%s' is not actually available", __FUNCTION__,
providerName.c_str());
return BAD_VALUE;
}
return providerInfo->initialize(interface, mDeviceState);
}
tryToInitializeProviderLocked主要内容有:1、根据provider name获取ICameraProvider服务;2、对providerInfo进行初始化;主要看第二部,源码如下:
status_t CameraProviderManager::ProviderInfo::initialize(
sp<provider::V2_4::ICameraProvider>& interface,
hardware::hidl_bitfield<provider::V2_5::DeviceState> currentDeviceState) {
status_t res = parseProviderName(mProviderName, &mType, &mId);
if (res != OK) {
ALOGE("%s: Invalid provider name, ignoring", __FUNCTION__);
return BAD_VALUE;
}
ALOGI("Connecting to new camera provider: %s, isRemote? %d",
mProviderName.c_str(), interface->isRemote());
// Determine minor version
mMinorVersion = 4;
auto cast2_6 = provider::V2_6::ICameraProvider::castFrom(interface);
sp<provider::V2_6::ICameraProvider> interface2_6 = nullptr;
if (cast2_6.isOk()) {
interface2_6 = cast2_6;
if (interface2_6 != nullptr) {
mMinorVersion = 6;
}
}
// We need to check again since cast2_6.isOk() succeeds even if the provider
// version isn't actually 2.6.
if (interface2_6 == nullptr){
auto cast2_5 =
provider::V2_5::ICameraProvider::castFrom(interface);
sp<provider::V2_5::ICameraProvider> interface2_5 = nullptr;
if (cast2_5.isOk()) {
interface2_5 = cast2_5;
if (interface != nullptr) {
mMinorVersion = 5;
}
}
} else {
auto cast2_7 = provider::V2_7::ICameraProvider::castFrom(interface);
if (cast2_7.isOk()) {
sp<provider::V2_7::ICameraProvider> interface2_7 = cast2_7;
if (interface2_7 != nullptr) {
mMinorVersion = 7;
}
}
}
// cameraDeviceStatusChange callbacks may be called (and causing new devices added)
// before setCallback returns
hardware::Return<Status> status = interface->setCallback(this);
if (!status.isOk()) {
ALOGE("%s: Transaction error setting up callbacks with camera provider '%s': %s",
__FUNCTION__, mProviderName.c_str(), status.description().c_str());
return DEAD_OBJECT;
}
if (status != Status::OK) {
ALOGE("%s: Unable to register callbacks with camera provider '%s'",
__FUNCTION__, mProviderName.c_str());
return mapToStatusT(status);
}
hardware::Return<bool> linked = interface->linkToDeath(this, /*cookie*/ mId);
if (!linked.isOk()) {
ALOGE("%s: Transaction error in linking to camera provider '%s' death: %s",
__FUNCTION__, mProviderName.c_str(), linked.description().c_str());
return DEAD_OBJECT;
} else if (!linked) {
ALOGW("%s: Unable to link to provider '%s' death notifications",
__FUNCTION__, mProviderName.c_str());
}
if (!kEnableLazyHal) {
// Save HAL reference indefinitely
mSavedInterface = interface;
} else {
mActiveInterface = interface;
}
ALOGV("%s: Setting device state for %s: 0x%" PRIx64,
__FUNCTION__, mProviderName.c_str(), mDeviceState);
notifyDeviceStateChange(currentDeviceState);
res = setUpVendorTags();
if (res != OK) {
ALOGE("%s: Unable to set up vendor tags from provider '%s'",
__FUNCTION__, mProviderName.c_str());
return res;
}
// Get initial list of camera devices, if any
std::vector<std::string> devices;
hardware::Return<void> ret = interface->getCameraIdList([&status, this, &devices](
Status idStatus,
const hardware::hidl_vec<hardware::hidl_string>& cameraDeviceNames) {
status = idStatus;
if (status == Status::OK) {
for (auto& name : cameraDeviceNames) {
uint16_t major, minor;
std::string type, id;
status_t res = parseDeviceName(name, &major, &minor, &type, &id);
if (res != OK) {
ALOGE("%s: Error parsing deviceName: %s: %d", __FUNCTION__, name.c_str(), res);
status = Status::INTERNAL_ERROR;
} else {
devices.push_back(name);
mProviderPublicCameraIds.push_back(id);
}
}
} });
if (!ret.isOk()) {
ALOGE("%s: Transaction error in getting camera ID list from provider '%s': %s",
__FUNCTION__, mProviderName.c_str(), linked.description().c_str());
return DEAD_OBJECT;
}
if (status != Status::OK) {
ALOGE("%s: Unable to query for camera devices from provider '%s'",
__FUNCTION__, mProviderName.c_str());
return mapToStatusT(status);
}
// Get list of concurrent streaming camera device combinations
if (mMinorVersion >= 6) {
res = getConcurrentCameraIdsInternalLocked(interface2_6);
if (res != OK) {
return res;
}
}
ret = interface->isSetTorchModeSupported(
[this](auto status, bool supported) {
if (status == Status::OK) {
mSetTorchModeSupported = supported;
}
});
if (!ret.isOk()) {
ALOGE("%s: Transaction error checking torch mode support '%s': %s",
__FUNCTION__, mProviderName.c_str(), ret.description().c_str());
return DEAD_OBJECT;
}
mIsRemote = interface->isRemote();
sp<StatusListener> listener = mManager->getStatusListener();
for (auto& device : devices) {
std::string id;
status_t res = addDevice(device, common::V1_0::CameraDeviceStatus::PRESENT, &id);
if (res != OK) {
ALOGE("%s: Unable to enumerate camera device '%s': %s (%d)",
__FUNCTION__, device.c_str(), strerror(-res), res);
continue;
}
}
ALOGI("Camera provider %s ready with %zu camera devices",
mProviderName.c_str(), mDevices.size());
// Process cached status callbacks
std::unique_ptr<std::vector<CameraStatusInfoT>> cachedStatus =
std::make_unique<std::vector<CameraStatusInfoT>>();
{
std::lock_guard<std::mutex> lock(mInitLock);
for (auto& statusInfo : mCachedStatus) {
std::string id, physicalId;
status_t res = OK;
if (statusInfo.isPhysicalCameraStatus) {
res = physicalCameraDeviceStatusChangeLocked(&id, &physicalId,
statusInfo.cameraId, statusInfo.physicalCameraId, statusInfo.status);
} else {
res = cameraDeviceStatusChangeLocked(&id, statusInfo.cameraId, statusInfo.status);
}
if (res == OK) {
cachedStatus->emplace_back(statusInfo.isPhysicalCameraStatus,
id.c_str(), physicalId.c_str(), statusInfo.status);
}
}
mCachedStatus.clear();
mInitialized = true;
}
// The cached status change callbacks cannot be fired directly from this
// function, due to same-thread deadlock trying to acquire mInterfaceMutex
// twice.
if (listener != nullptr) {
mInitialStatusCallbackFuture = std::async(std::launch::async,
&CameraProviderManager::ProviderInfo::notifyInitialStatusChange, this,
listener, std::move(cachedStatus));
}
return OK;
}
函数代码比较长,主要有以下步骤:
- parseProviderName,解析provider name并校验;
- ICameraProvider接口选择(随着android的升级, ICameraProvider.hal的接口在不断的迭代升级,代码中会做兼容,对于不同的ICameraProvider的实现,调用不同的ICameraProvider接口,当前最新为2_7版本);
- 通过ICameraProvider接口设置在底层设置回调,setCallback(this);
- 设置死亡监听linkToDeath
- notifyDeviceStateChange通知设备状态
- 设置vendor tag(可以理解为底层上报的能力)setUpVendorTags,在setUpVendorTags会通过ICameraProvider接口获取vendor tag, 然后设置,此处不再详述;
- 获取camera id 列表getCameraIdList
// Get initial list of camera devices, if any
std::vector<std::string> devices;
hardware::Return<void> ret = interface->getCameraIdList([&status, this, &devices](
Status idStatus,
const hardware::hidl_vec<hardware::hidl_string>& cameraDeviceNames) {
status = idStatus;
if (status == Status::OK) {
for (auto& name : cameraDeviceNames) {
uint16_t major, minor;
std::string type, id;
status_t res = parseDeviceName(name, &major, &minor, &type, &id);
if (res != OK) {
ALOGE("%s: Error parsing deviceName: %s: %d", __FUNCTION__, name.c_str(), res);
status = Status::INTERNAL_ERROR;
} else {
devices.push_back(name);
mProviderPublicCameraIds.push_back(id);
}
}
} });
- 其他CameraProviderManager的成员初始化(其中包含了很多, 暂不详述);
- 通过回调函数上报相机状态
// The cached status change callbacks cannot be fired directly from this
// function, due to same-thread deadlock trying to acquire mInterfaceMutex
// twice.
if (listener != nullptr) {
mInitialStatusCallbackFuture = std::async(std::launch::async,
&CameraProviderManager::ProviderInfo::notifyInitialStatusChange, this,
listener, std::move(cachedStatus));
}
至此CameraProviderManager的初始化完成。
2.3 通过CameraProviderManager获取初始化后的设备id列表
源码如下:
std::vector<std::string> CameraProviderManager::getCameraDeviceIds() const {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
std::vector<std::string> deviceIds;
for (auto& provider : mProviders) {
for (auto& id : provider->mUniqueCameraIds) {
deviceIds.push_back(id);
}
}
return deviceIds;
}
2.4 设备状态通知
源码如下:
for (auto& cameraId : deviceIds) {
String8 id8 = String8(cameraId.c_str());
if (getCameraState(id8) == nullptr) {
onDeviceStatusChanged(id8, CameraDeviceStatus::PRESENT);
}
}
2.5 相机参数过滤
// Derive primary rear/front cameras, and filter their charactierstics.
// This needs to be done after all cameras are enumerated and camera ids are sorted.
if (SessionConfigurationUtils::IS_PERF_CLASS) {
// Assume internal cameras are advertised from the same
// provider. If multiple providers are registered at different time,
// and each provider contains multiple internal color cameras, the current
// logic may filter the characteristics of more than one front/rear color
// cameras.
Mutex::Autolock l(mServiceLock);
filterSPerfClassCharacteristicsLocked();
}
至此, CameraService启动流程基本完成。
三、总结
CameraService服务启动相对简单, 重点在于和底层及其其他模块的交互。















 987
987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









