






库卡外部启动原创程序
西门子s7-1200 1500 KUKA机器人外部启动功能块,产线已实践使用。
程序以 S7-1200 与 kuka机器人通过PN通讯为例,实现对kuka机器人外部启动调用对应子程序的功能。
TIA博图V15.1SP1以上软件都可打开
YID:5418675953682249
自动化发烧友

库卡外部启动原创程序是一项基于西门子S7-1200和1500的KUKA机器人外部启动功能块。这一功能块已经在生产线上进行了实践使用,取得了良好的效果。本文将以S7-1200与KUKA机器人之间的PN通讯为例,详细介绍如何实现对KUKA机器人的外部启动调用对应子程序的功能。
首先,我们需要使用TIA博图V15.1SP1以上的软件打开工程。在打开的工程中,我们可以看到已经添加了S7-1200和KUKA机器人的设备。接下来,我们需要创建一个功能块,该功能块将作为外部启动的触发器。
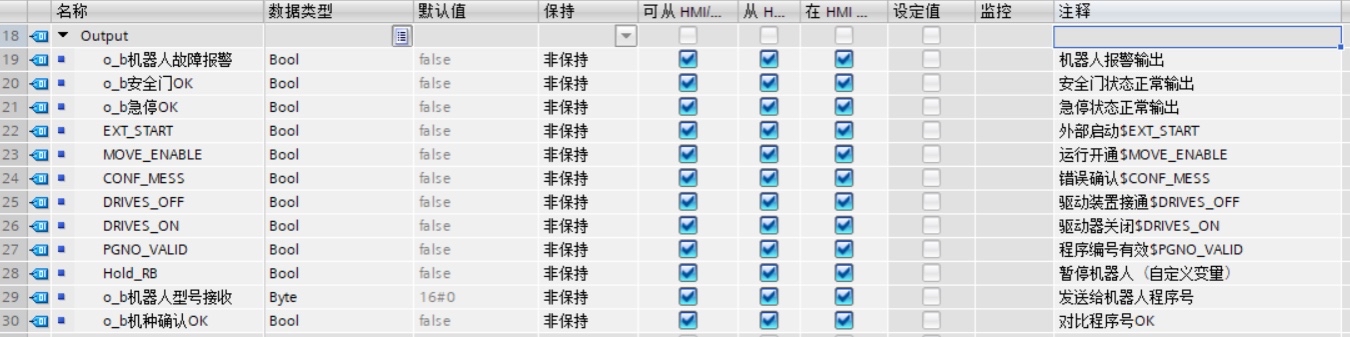
首先,在TIA博图中创建一个新的OB块,该块将作为外部启动触发器的主程序。在该OB块中,我们可以定义启动机制,例如根据设备状态来触发外部启动。具体来说,我们可以使用PLC的输入信号作为触发器。当PLC的输入信号满足特定条件时,我们可以调用相应的KUKA机器人子程序。
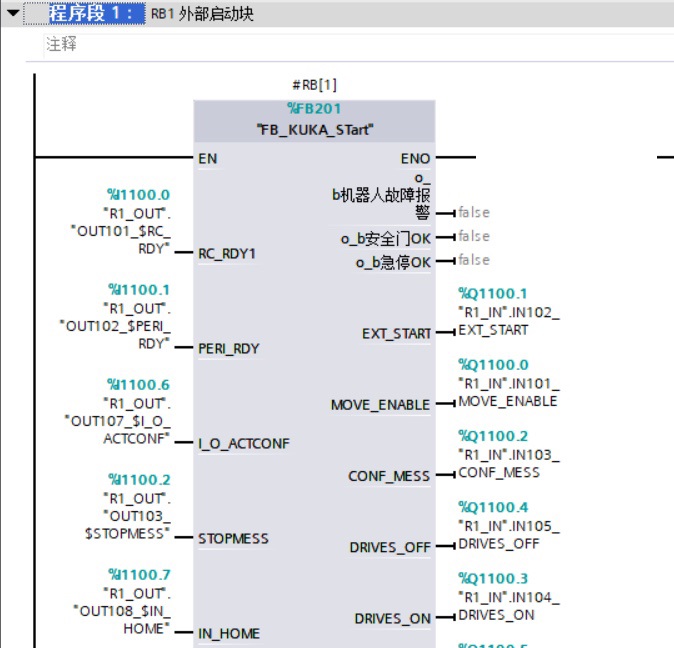
在OB块内部,我们可以定义逻辑判断条件,并利用S7-1200的功能块进行相应的控制。比如,我们可以使用FB12功能块来检测KUKA机器人的状态,以确定是否可以执行外部启动操作。如果机器人处于运行状态,我们可以调用KUKA机器人的子程序进行外部启动。
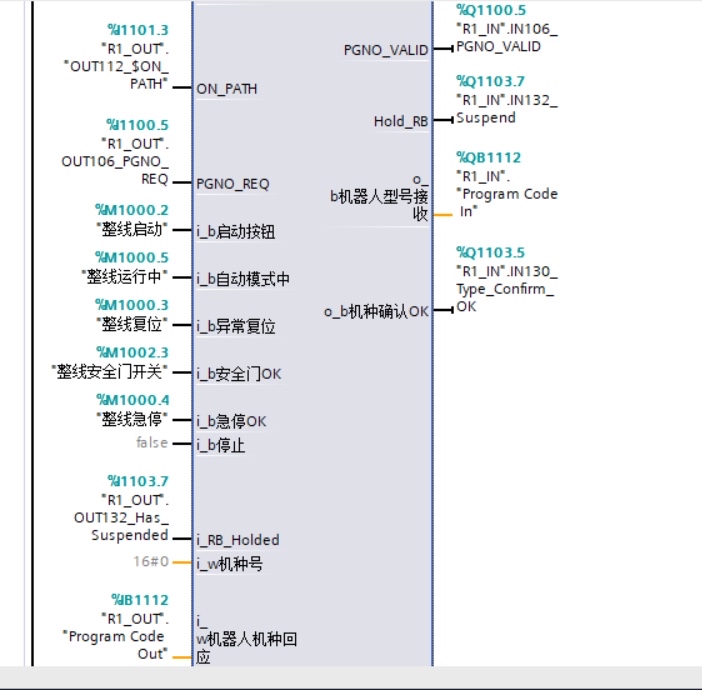
接下来,我们需要在OB块中调用KUKA机器人的子程序。我们可以使用FB13功能块来实现与KUKA机器人的通讯,并调用子程序。该功能块使用PN通讯协议与KUKA机器人进行数据交换。通过传输特定的命令和参数,我们可以实现对KUKA机器人的外部启动。
在调用KUKA机器人子程序之前,我们需要确保通讯连接正常。可以使用FB14功能块来进行通讯状态的监测和调试。如果通讯状态良好,我们可以调用KUKA机器人的相应子程序进行外部启动。在调用子程序之后,我们可以通过FB15功能块对机器人状态进行监测,以确保机器人正常启动。
综上所述,通过以上步骤,我们可以实现对KUKA机器人的外部启动调用对应子程序的功能。通过使用S7-1200和1500与KUKA机器人的PN通讯协议,我们可以实现PLC与机器人的数据交换和控制。这一功能不仅可以提高生产线的效率,还可以实现对机器人运行状态的监控和控制。
需要注意的是,上述步骤仅为示例,实际操作需要根据具体情况进行调整。对于不同型号的PLC和机器人,可能需要使用不同的功能块和通讯协议。因此,在实施该功能时,建议参考相关设备的官方文档和技术规范。
总之,库卡外部启动原创程序是一项非常实用的技术,可以帮助工程师实现对KUKA机器人的外部启动调用对应子程序的功能。通过合理的配置和调试,我们可以实现PLC与机器人之间的数据交换和控制,提高生产线的效率和自动化水平。
相关的代码,程序地址如下:http://matup.cn/675953682249.html
















 887
887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









