







使用CAN总线来更新程序,用Bootloader实现。其实就是通过上位机把.bin/hex文件以CAN通讯的方式发送给单片机并存储在规定的Flash中。这个过程与手机端更新APP类似。
以STM8单片机为例,该如何实现Bootloader呢?今天和大家分享一下。
01、什么是Bootloader
Bootloader是一段用于更新自身应用软件并独立运行的代码,常被用于升级产品和修复产品bug。STM8单片机如果要下载hex文件的话需要通过STVP和STLINK来实现,单片机的引脚SWIM就是下载接口。如果产品在用户端被封装好了,无法通过SWIM来下载该怎么办呢?就使用Bootloader,STM支持CAN和UART实现Bootloader。就是通过CAN通信或者UART通信将数据存放在STM8的Flash上。
02、划分Flash区间
STM8的中断向量跳转地址是固定的,会跳转到0x8000对应中断的偏移地址,所以会把Bootloader存放在0x8000开始的空间内,比如给Bootloader代码所划分的空间为4k,那么空间起始地址为:0x8000-0x8FFF;那么应用代码的起始地址就可以从0x9000开始。
03、修改中断向量表
STM8的中断向量表通过一段特定的代码来实现,并需要根据前文提到的空间划分来修改。STM8的应用程序起始地址是0x8400,默认的向量表如下代码所示。
__root const long reintvec[]@".intvec"={0x82008080,0x82008404,0x82008408,0x8200840c,0x82008410,0x82008414,0x82008418,0x8200841c,0x82008420,0x82008424,0x82008428,0x8200842c,0x82008430,0x82008434,0x82008438,0x8200843c,0x82008440,0x82008444,0x82008448,0x8200844c,0x82008450,0x82008454,0x82008458,0x8200845c,0x82008460,0x82008464,0x82008468,0x8200846c,0x82008470,0x82008474,0x82008478,0x8200847c,};
前文已经将应用程序的起始地址修改为0x9000,所以,向量表的的修改方法为:除了第一个元素为,其余的元素将8改为9,修改完后代码如下:
__root const long reintvec[]@".intvec"={0x82008080,0x82009404,0x82009408,0x8200940c,0x82009010,0x82009014,0x82009018,0x8200901c,0x82009020,0x82009024,0x82009028,0x8200902c,0x82009030,0x82009034,0x82009038,0x8200903c,0x82009040,0x82009044,0x82009048,0x8200904c,0x82009050,0x82009054,0x82009058,0x8200905c,0x82009060,0x82009064,0x82009068,0x8200906c,0x82009070,0x82009074,0x82009078,0x8200907c,};
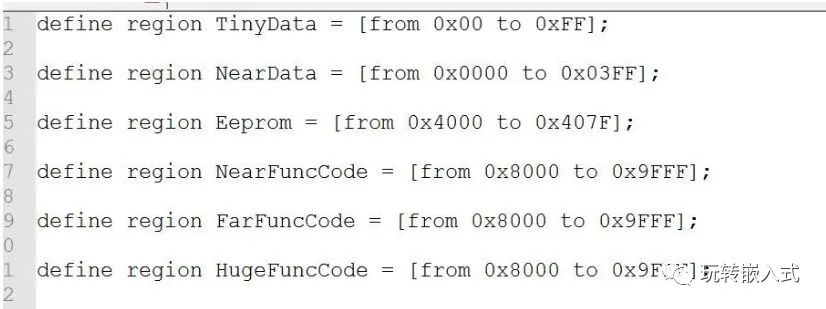
04、修改ICF文件
ICF文件存放在编程环境的安装目录下,每个型号/系列的单片机都会对应一个ICF
文件,需要修改一下ICF文件,这里需要根据flash空间的划分来修改,前面将Bootloader的终止地址设置为0x9FFF,所以修改如下:
define region NearFuncCode = [from 0x8000 to 0x8FFF];define block INTVEC with size = 0x80 { ro section .intvec };place at start of NearFuncCode { block INTVEC };
05、跳转命令
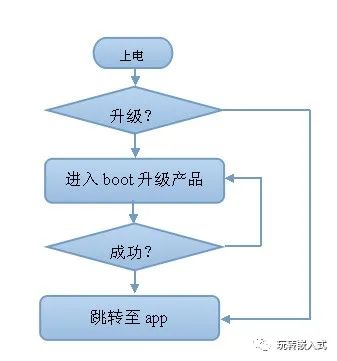
所谓跳转,就是在应用程序中跳转到Boot中去升级;升级完成后需要跳转到应用程序中,所跳转的起始就是起始地址。Bootloader跳转到应用程序的代码如下,
asm("LDW X, SP ");asm("LD A, $FF");asm("LD XL, A ");asm("LDW SP, X ");asm("JPF $9000");
应用程序跳转到Bootloader中的代码如下
sm("LDW X, SP ");asm("LD A, $FF");asm("LD XL, A ");asm("LDW SP, X ");asm("JPF $8000");
06、编写交互代码
以上设置好之后,就可以编写交互代码了,所以交互代码其实就是一套协议,规定了应用程序如何跳转到Boot,在Boot中如何处理和存储数据,这需要上位机的支持。如果只是用于自家的产品,就可以自己定义协议。也可以使用标准的协议,比如汽车行业中的UDS(统一诊断服务)。















 460
460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









