







这个是关于DCM的医学坐标系的一些背景知识,本文将在此基础上做些补充。
DICOM医学图像读取涉及到的医学坐标体系_sunyao_123的博客-CSDN博客_dicom坐标系
关于坐标名称,看了许多博文,有像素坐标,真实坐标,体素坐标,图像坐标,世界坐标搞得一头雾水。本文中CT坐标指的是设备拍摄时的坐标,单位为mm。图像坐标指的是转化为numpy后的坐标,单位为单位1。自己的理解世界坐标应该是CT坐标,体素坐标,像素坐标,真实坐标及图像坐标应该都是图像坐标。
一 、 肺部图像的转化
首先,CT图像的坐标原点是左上角,和将CT图像转为numpy格式的坐标原点一致,方便处理。
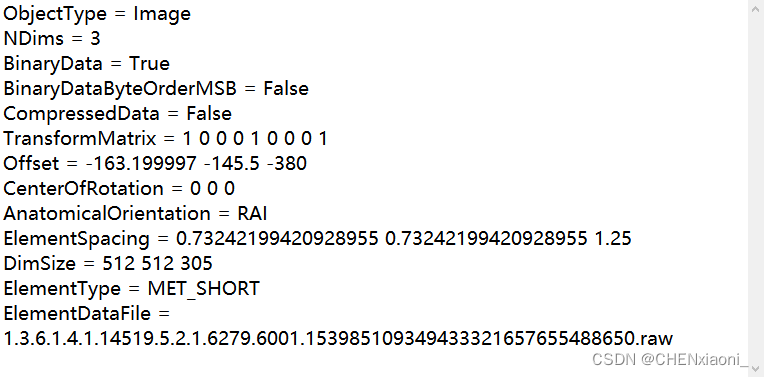
其次,CT图像的像素间距与像素原点每个case都不同具体和拍摄设备参数相关,会将这些参数存储到mha文件中。以下图为例,此case中的CT像素间隔和原点坐标分别为
Spacing[x ,y, z] = [0.73242199, 0.73242199, 1.25]
Origin[x ,y, z] = [-163.199997, -145.5, -380.] 单位都是mm。而像素个数为512*512*305也就是转成numpy后,数组的shape为[305, 512, 512]。
我的理解是在图像坐标中图像的像素间隔为单位1,CT坐标下像素间隔为spacing,真实的图像大小应为转为numpy的shape乘上spacing。
new_size = data.shape * numpySpacing[::-1] data.shape的输出顺序为(z, y, x)故相乘时需要将numpySpacing也反序。new_size为CT图像的真实大小单位为mm。
在可视化肺结节时我们使用的是图像坐标,故需要将肺结节的坐标也转化为图像坐标。
itkImage = sitk.ReadImage('D:/BaiduNetdiskDownload/LUNA16/subset9/1.3.6.1.4.1.14519.5.2.1.6279.6001.153985109349433321657655488650.mhd')
numpyOrigin = np.array(list(itkImage.GetOrigin()))
numpySpacing = np.array(list(itkImage.GetSpacing()))
print(numpyOrigin,numpySpacing)
data = sitk.GetArrayFromImage(itkImage)
print(data.shape)
new_size = data.shape * numpySpacing[::-1]
print(new_size)
# 输出结果
[-163.199997 -145.5 -380. ] [0.73242199 0.73242199 1.25 ]
(305, 512, 512)
[381.25 375.00006104 375.00006104]二、肺结节的坐标转化
以上述case为例,肺结节的坐标信息如下。分别是ID,x,y,z,半径。单位是mm。
![]()
转化的公式:图像坐标 = CT坐标系下的(结节位置 - 原点位置) / 像素间隔
def worldToVoxelCoord(worldCoord, origin, spacing):
# 图像坐标系的结节位置 = CT坐标系下的(结节位置 - 原点位置) / 体素间隔
stretchedVoxelCoord = np.absolute(worldCoord - origin)
voxelCoord = stretchedVoxelCoord / spacing
return voxelCoord三、可视化
显示代码转载自: LUNA16数据集(二)肺结节可视化 - 走看看
def show_nodules(ct_scan, nodules, radius=20, pad=5, max_show_num=3): # radius是正方形边长一半,pad是边的宽度,max_show_num最大展示数
show_index = []
for idx in range(nodules.shape[0]): # lable是一个nx4维的数组,n是肺结节数目,4代表x,y,z,以及直径
if idx < max_show_num:
if abs(nodules[idx, 0]) + abs(nodules[idx, 1]) + abs(nodules[idx, 2]) + abs(nodules[idx, 3]) == 0: continue
x, y, z = int(nodules[idx, 0]), int(nodules[idx, 1]), int(nodules[idx, 2])
data = ct_scan[z]
# 注意 y代表纵轴,x代表横轴
data[max(0, y - radius):min(data.shape[0], y + radius),
max(0, x - radius - pad):max(0, x - radius)] = 3000 # 竖线
data[max(0, y - radius):min(data.shape[0], y + radius),
min(data.shape[1], x + radius):min(data.shape[1], x + radius + pad)] = 3000 # 竖线
data[max(0, y - radius - pad):max(0, y - radius),
max(0, x - radius):min(data.shape[1], x + radius)] = 3000 # 横线
data[min(data.shape[0], y + radius):min(data.shape[0], y + radius + pad),
max(0, x - radius):min(data.shape[1], x + radius)] = 3000 # 横线
if z in show_index: # 检查是否有结节在同一张切片,如果有,只显示一张
continue
show_index.append(z)
plt.figure
plt.imshow(data, cmap='gray')
plt.show()数据准备代码:
itkImage = sitk.ReadImage('D:/BaiduNetdiskDownload/LUNA16/subset9/1.3.6.1.4.1.14519.5.2.1.6279.6001.153985109349433321657655488650.mhd')
numpyOrigin = np.array(list(itkImage.GetOrigin()))
numpySpacing = np.array(list(itkImage.GetSpacing()))
print(numpyOrigin,numpySpacing)
data = sitk.GetArrayFromImage(itkImage)
print(data.shape)
new_size = data.shape * numpySpacing[::-1]
print(new_size)
annos = np.array(pandas.read_csv('D:/BaiduNetdiskDownload/LUNA16/CSVFILES/annotations.csv'))
# 图像相应的结节信息
annos = annos[198,1:]
# CT坐标转为图像坐标
annos1 = worldToVoxelCoord(annos[:3],numpyOrigin,numpySpacing)
# 结节半径也转为图像坐标
annos = np.concatenate([annos1,[annos[3]/numpySpacing[1]]])
annos = np.expand_dims(annos,axis=0)
print(annos.shape)
show_nodules(data,annos)结果显示:
















 1156
1156











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









