







前言
上章深入分析了帧循环中呈现阶段的具体实现。本章将分析多线程下的记录与提交,进一步剖析vsg帧循环过程中的同步机制,并揭露信号量(VkSemaphore)和围栏(VkFence)以及vsg::FrameBlock与vsg::Barrier在其中的作用。
目录
- 1 信号量(VkSemaphore)、栅栏(VkFence)、vsg::FrameBlock与vsg::Barrier
- 2 多线程记录与提交
1 信号量(VkSemaphore)、围栏(VkFence)与vsg::FrameBlock、vsg::Barrier
vsg::Semaphore封装了VkSaphore,用于将vulkan命令的完成与其他vulkan命令提交的开始同步,为GPU内部的同步;vsg::Fence封装了vkFence,用于同步Vulkan命令提交到队列的完成情况,用于应用程序(CPU端)与Vulkan命令提交到队列的完成情况(GPU端)的同步;vsg::FrameBlock提供了一种机制,用于同步等待新帧开始的线程;vsg::Barrier提供了一种同步多个线程的方法,一旦指定数量的线程加入Barrier,这些线程就会一起释放。
1.1 vsg::Semaphore
Semaphore::Semaphore(Device* device, VkPipelineStageFlags pipelineStageFlags, void* pNextCreateInfo) :
_pipelineStageFlags(pipelineStageFlags),
_device(device)
{
VkSemaphoreCreateInfo semaphoreInfo = {};
semaphoreInfo.sType = VK_STRUCTURE_TYPE_SEMAPHORE_CREATE_INFO;
semaphoreInfo.pNext = pNextCreateInfo;
VkResult result = vkCreateSemaphore(*device, &semaphoreInfo, _device->getAllocationCallbacks(), &_semaphore);
if (result != VK_SUCCESS)
{
throw Exception{"Error: Failed to create semaphore.", result};
}
}vsg::Semaphore构造函数使用vkCreateSemaphore创建信号量VkSemaphore,信号量的创建与某一逻辑设备绑定,即信号量可用于GPU内部同一队列或同一逻辑设备的不同队列间的同步。
Semaphore::~Semaphore()
{
if (_semaphore)
{
vkDestroySemaphore(*_device, _semaphore, _device->getAllocationCallbacks());
}
}vsg::Semaphore析构函数使用vkDestroySemaphore释放信号量VkSemaphore。
1.2 vsg::Fence
Fence::Fence(Device* device, VkFenceCreateFlags flags) :
_device(device)
{
VkFenceCreateInfo createFenceInfo = {};
createFenceInfo.sType = VK_STRUCTURE_TYPE_FENCE_CREATE_INFO;
createFenceInfo.flags = flags;
createFenceInfo.pNext = nullptr;
if (VkResult result = vkCreateFence(*device, &createFenceInfo, _device->getAllocationCallbacks(), &_vkFence); result != VK_SUCCESS)
{
throw Exception{"Error: Failed to create Fence.", result};
}
}vsg::Fence构造函数使用vkCreateFence创建VkFence,围栏的创建与某一逻辑设备绑定。
Fence::~Fence()
{
if (_vkFence)
{
vkDestroyFence(*_device, _vkFence, _device->getAllocationCallbacks());
}
}vsg::Fence析构函数使用vkDestroyFence释放围栏。
VkResult Fence::wait(uint64_t timeout) const
{
return vkWaitForFences(*_device, 1, &_vkFence, VK_TRUE, timeout);
}vsg::Fence在应用层(CPU端)的使用通过调用wait函数,其通过封装vkWaitForFences实现。
VkResult Fence::reset() const
{
return vkResetFences(*_device, 1, &_vkFence);
}vsg::Fence在GPU端使用时,需重置为无信号状态,否则可能会导致应用层调用vkWaitForFences卡死。
1.3 vsg::FrameBlock
vsg::FrameBlock提供了一种机制,用于同步等待新帧开始的线程。
std::mutex _mutex;
std::condition_variable _cv;
ref_ptr<FrameStamp> _value;
ref_ptr<ActivityStatus> _status;上述代码为vsg::FrameBlock的成员变量,其通过对std::mutex和std::condition_variable的封装实现了一种针对vsg::FrameStamp是否变化的阻塞能力,即同步所有等待新帧开始的线程,而变量_status(vsg::ActivityStatus类型)用于标记vsg::FrameBlock的阻塞能力是否有效。
bool wait_for_change(ref_ptr<FrameStamp>& value)
{
std::unique_lock lock(_mutex);
while (_value == value && _status->active())
{
_cv.wait(lock);
}
value = _value;
return _status->active();
}通过调用wait_for_change接口,当传入的vsg::FrameStamp对象与已有的一致时,阻塞应用程序所在线程。
void set(ref_ptr<FrameStamp> frameStamp)
{
std::scoped_lock lock(_mutex);
_value = frameStamp;
_cv.notify_all();
}当设置vsg::FrameStamp对象后,则通知所有阻塞线程解除阻塞。
1.4 vsg::Barrier
vsg::Barrier提供了一种同步多个线程的方法,一旦指定数量的线程加入Barrier,这些线程就会一起释放。
const uint32_t _num_threads;
uint32_t _num_arrived;
uint32_t _phase;
std::mutex _mutex;
std::condition_variable _cv;vsg::Barrier同样是封装std::mutex和std::condition_variable实现,辅以_num_theads(同步的线程数)和_num_arrived(到达的线程数)实现多线程同步。
void arrive_and_wait()
{
std::unique_lock lock(_mutex);
if (++_num_arrived == _num_threads)
{
_release();
}
else
{
auto my_phase = _phase;
_cv.wait(lock, [this, my_phase]() { return this->_phase != my_phase; });
}
}
如上代码为arrive_and_wait函数实现,当到达的线程数与总线程数一致时,则释放所有线程,否则阻塞且记录当前阶段my_phase。
void _release()
{
_num_arrived = 0;
++_phase;
_cv.notify_all();
}
释放所有线程的代码如上所示,同时更新当前的阶段(++_phase),将当前到达的线程数_num_arrived置为0。
void arrive_and_drop()
{
std::unique_lock lock(_mutex);
if (++_num_arrived == _num_threads)
{
_release();
}
}arrive_and_drop会更新当前到达的线程数,同时判断,当到达线程数等于所有线程数时,则释放所有线程,但不阻塞当前线程。
2 多线程记录与提交
#if 1
if (_threading)
#else
// The following is a workaround for an odd "Possible data race during write of size 1" warning that valgrind tool=helgrind reports
// on the first call to vkBeginCommandBuffer despite them being done on independent command buffers. This could well be a driver bug or a false positive.
// If you want to quieten this warning then change the #if above to #if 0 as rendering the first three frames single threaded avoids the warning.
if (_threading && _frameStamp->frameCount > 2)
#endif
{
_frameBlock->set(_frameStamp);
_submissionCompleted->arrive_and_wait();
}
else
{
for (auto& recordAndSubmitTask : recordAndSubmitTasks)
{
recordAndSubmitTask->submit(_frameStamp);
}
}上述代码为Viewer.cpp中的821-838行,当标记_threading为true时,执行多线程提交。首先更新当前帧(上述代码第9行),接着等待提交的完成(上述代码第10行)。其中_frameBlock和_submissionComplete分别为vsg::FrameBlock和vsg::Barrier对象,其初始化在vsg::Viewer::setupThreading函数中完成。vsg::Viewer::setupThreading的执行可分为多线程同步变量初始化、创建多线程两部分。
uint32_t numValidTasks = 0;
for (const auto& task : recordAndSubmitTasks)
{
if (!task->commandGraphs.empty())
{
++numValidTasks;
}
}
// check if there is any point in setting up threading
if (numValidTasks == 0)
{
return;
}
status->set(true);
_threading = true;
_frameBlock = FrameBlock::create(status);
_submissionCompleted = Barrier::create(1 + numValidTasks);上述代码首先统计有效的提交任务数,接着创建vsg::FrameBlock和vsg::Barrier对象,其中vsg::Barrier对象_submissionCompleted传入的线程数为有效任务数+1,其中'+1'代表主线程,即主线程调用其arrive_and_wait方法并阻塞,当所有提交线程完成时,则释放主线程。
创建多线程部分以vsg::RecordAndSubmitTask为粒度创建,vsg::RecordAndSubmitTask与vsg::CommandGraph和vsg::TransferTask关系如下:
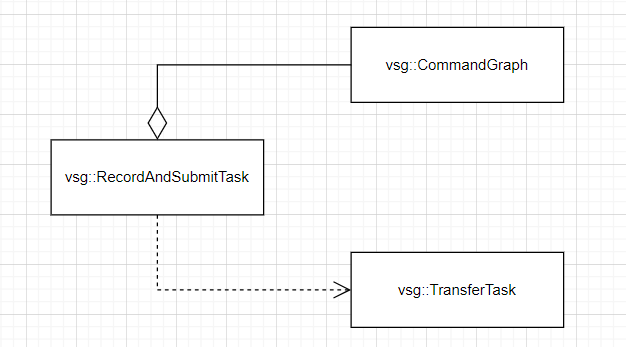
线程的创建分两种情况,当vsg::RecordAndSubmitTask对象中包含的CommandGraph数组数量为1且vsg::TransferTask对象为空时,则仅创建一个任务提交线程,否则需同时创建数据传输线程。
if (task->commandGraphs.size() == 1 && !task->transferTask)
{
// task only contains a single CommandGraph so keep thread simple
auto run = [](ref_ptr<RecordAndSubmitTask> viewer_task, ref_ptr<FrameBlock> viewer_frameBlock, ref_ptr<Barrier> submissionCompleted, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(viewer_task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = viewer_frameBlock->initial_value;
// wait for this frame to be signaled
while (viewer_frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer run", COLOR_RECORD);
viewer_task->submit(frameStamp);
submissionCompleted->arrive_and_drop();
}
};
threads.emplace_back(run, task, _frameBlock, _submissionCompleted, make_string("Viewer run thread"));
}
上述代码为,当vsg::RecordAndSubmitTask对象中包含的CommandGraph数组数量为1且vsg::TransferTask对象为空时,仅创建一个提交线程,线程中主要调用vsg::RecordAndSubmitTask的submit方法执行提交任务。其中线程为std::thread。
else if (!task->commandGraphs.empty())
{
// we have multiple CommandGraphs in a single Task so set up a thread per CommandGraph
struct SharedData : public Inherit<Object, SharedData>
{
SharedData(ref_ptr<RecordAndSubmitTask> in_task, ref_ptr<FrameBlock> in_frameBlock, ref_ptr<Barrier> in_submissionCompleted, uint32_t numThreads) :
task(in_task),
frameBlock(in_frameBlock),
submissionCompletedBarrier(in_submissionCompleted)
{
recordedCommandBuffers = RecordedCommandBuffers::create();
recordStartBarrier = Barrier::create(numThreads);
recordCompletedBarrier = Barrier::create(numThreads);
}
// shared between all threads
ref_ptr<RecordAndSubmitTask> task;
ref_ptr<FrameBlock> frameBlock;
ref_ptr<Barrier> submissionCompletedBarrier;
// shared between threads associated with each task
ref_ptr<RecordedCommandBuffers> recordedCommandBuffers;
ref_ptr<Barrier> recordStartBarrier;
ref_ptr<Barrier> recordCompletedBarrier;
};
uint32_t numThreads = static_cast<uint32_t>(task->commandGraphs.size());
if (task->transferTask) ++numThreads;
ref_ptr<SharedData> sharedData = SharedData::create(task, _frameBlock, _submissionCompleted, numThreads);
auto run_primary = [](ref_ptr<SharedData> data, ref_ptr<CommandGraph> commandGraph, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer primary", COLOR_RECORD);
// primary thread starts the task
data->task->start();
data->recordStartBarrier->arrive_and_wait();
//vsg::info("run_primary");
commandGraph->record(data->recordedCommandBuffers, frameStamp, data->task->databasePager);
data->recordCompletedBarrier->arrive_and_wait();
// primary thread finishes the task, submitting all the command buffers recorded by the primary and all secondary threads to its queue
data->task->finish(data->recordedCommandBuffers);
data->recordedCommandBuffers->clear();
data->submissionCompletedBarrier->arrive_and_wait();
}
};
auto run_secondary = [](ref_ptr<SharedData> data, ref_ptr<CommandGraph> commandGraph, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer secondary", COLOR_RECORD);
data->recordStartBarrier->arrive_and_wait();
commandGraph->record(data->recordedCommandBuffers, frameStamp, data->task->databasePager);
data->recordCompletedBarrier->arrive_and_wait();
}
};
auto run_transfer = [](ref_ptr<SharedData> data, ref_ptr<TransferTask> transferTask, TransferTask::TransferMask transferMask, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer transfer", COLOR_RECORD);
data->recordStartBarrier->arrive_and_wait();
//vsg::info("run_transfer");
if (auto transfer = transferTask->transferData(transferMask); transfer.result == VK_SUCCESS)
{
if (transfer.dataTransferredSemaphore)
{
data->task->earlyDataTransferredSemaphore = transfer.dataTransferredSemaphore;
}
}
data->recordCompletedBarrier->arrive_and_wait();
}
};
for (uint32_t i = 0; i < task->commandGraphs.size(); ++i)
{
if (i == 0)
threads.emplace_back(run_primary, sharedData, task->commandGraphs[i], make_string("Viewer primary thread"));
else
threads.emplace_back(run_secondary, sharedData, task->commandGraphs[i], make_string("Viewer seconary thread ", i));
}
if (task->transferTask)
{
threads.emplace_back(run_transfer, sharedData, task->transferTask, TransferTask::TRANSFER_BEFORE_RECORD_TRAVERSAL, make_string("Viewer early transferTask thread"));
}
}其它情况创建的线程,需针对vsg::TransferTask对象创建传输线程,当存在多个CommandGraph时,创建的提交线程的方式需区分。线程使用std::thread,通过lambda表达式封装线程的执行函数。
SharedData(ref_ptr<RecordAndSubmitTask> in_task, ref_ptr<FrameBlock> in_frameBlock, ref_ptr<Barrier> in_submissionCompleted, uint32_t numThreads) :
task(in_task),
frameBlock(in_frameBlock),
submissionCompletedBarrier(in_submissionCompleted)
{
recordedCommandBuffers = RecordedCommandBuffers::create();
recordStartBarrier = Barrier::create(numThreads);
recordCompletedBarrier = Barrier::create(numThreads);
}上述代码为SharedData的构造函数,提交线程和数据传输线程的同步通过上述recordStartBarrier和recordCompletedBarrier两个vsg::Barrier对象实现。
auto run_primary = [](ref_ptr<SharedData> data, ref_ptr<CommandGraph> commandGraph, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer primary", COLOR_RECORD);
// primary thread starts the task
data->task->start();
data->recordStartBarrier->arrive_and_wait();
//vsg::info("run_primary");
commandGraph->record(data->recordedCommandBuffers, frameStamp, data->task->databasePager);
data->recordCompletedBarrier->arrive_and_wait();
// primary thread finishes the task, submitting all the command buffers recorded by the primary and all secondary threads to its queue
data->task->finish(data->recordedCommandBuffers);
data->recordedCommandBuffers->clear();
data->submissionCompletedBarrier->arrive_and_wait();
}
};
auto run_secondary = [](ref_ptr<SharedData> data, ref_ptr<CommandGraph> commandGraph, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer secondary", COLOR_RECORD);
data->recordStartBarrier->arrive_and_wait();
commandGraph->record(data->recordedCommandBuffers, frameStamp, data->task->databasePager);
data->recordCompletedBarrier->arrive_and_wait();
}
};
auto run_transfer = [](ref_ptr<SharedData> data, ref_ptr<TransferTask> transferTask, TransferTask::TransferMask transferMask, const std::string& threadName) {
auto local_instrumentation = shareOrDuplicateForThreadSafety(data->task->instrumentation);
if (local_instrumentation) local_instrumentation->setThreadName(threadName);
auto frameStamp = data->frameBlock->initial_value;
// wait for this frame to be signaled
while (data->frameBlock->wait_for_change(frameStamp))
{
CPU_INSTRUMENTATION_L1_NC(local_instrumentation, "Viewer transfer", COLOR_RECORD);
data->recordStartBarrier->arrive_and_wait();
//vsg::info("run_transfer");
if (auto transfer = transferTask->transferData(transferMask); transfer.result == VK_SUCCESS)
{
if (transfer.dataTransferredSemaphore)
{
data->task->earlyDataTransferredSemaphore = transfer.dataTransferredSemaphore;
}
}
data->recordCompletedBarrier->arrive_and_wait();
}
};
如上代码为三个lambda函数,run_primary、run_secondary、run_transfer,分别对应第一个提交线程、其它提交线程、数据传输线程的执行函数。其将主体执行内容放置在recordStartBarrier->arrive_and_wait() 和 recordCompletedBarrier->arrive_and_wait()之间,实现线程间的同步,采用如下的模式实现线程和主线程的同步:
while (data->frameBlock->wait_for_change(frameStamp))
{
//执行内容
data->submissionCompletedBarrier->arrive_and_wait();
}vulkanscenegraph显示倾斜模型(6.2)-记录与提交-CSDN博客中将任务提交的具体实现分为开始、recordTraversal前的数据传输、record、完成四个部分,而run_primary独自负责任务的开始、recordTraversal前的数据传输、完成三个部分,run_primary与run_secondary共同负责record部分。通过run_primary函数的实现可看出,当前帧所有数据传输完成、命令录制完成,最后调用finish方法提交任务到队列。
文末:本章深入分析了帧循环中多线程下的记录与提交,首先深入剖析了vsg中与多线程同步相关的封装:vsg::Semaphore、vsg::Fence、vsg::FrameBlock、vsg::Barrier,接着进一步分析了记录与提交过程中的多线程机制。下章将分析vsg::DatabasePager在更新场景图过程中的作用。
待分析项:vsg::DatabasePager在更新场景图过程中的作用。


















 891
891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











