






作者 | 赵孔瑞 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/574529404?
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【多传感器融合】技术交流群
后台回复【多传感器融合综述】获取图像/激光雷达/毫米波雷达融合综述等干货资料!
在过去的一段时间里我们同步开发了3款4D毫米波雷达,并在十一之前紧张但顺利的取得了阶段性的成果,验证了我们方案的正确性。目前在业内可以算是点云数量最高的,真正实现了“成像”。简单来讲,我们的雷达达到了以下效果:
高密度点云成像:我们实现了单帧3~4万点云的成像能力,也就是60~80万pts/s的点云效果
车辆目标:单个车辆目标的单帧点云数量达到6000点
静态目标:护栏目标的单帧点云数量可达上万点
杂点极少:虽然我们单帧点云数量很多,但是杂点却极少,杂点占比不到1%,这得益于我们创新性的信号处理算法,在信号处理阶段就很好地进行了抑制
探测距离:125m/300m,探测距离可以通过软件实时配置
我们充分挖掘了4D毫米波雷达的潜力,实现了惊艳的效果。同时,在开发的过程中,也促使我们有了新的思考。
1波导天线以后会成为4D毫米波雷达的标配
1)会使毫米波雷达面积不那么大,会减小雷达体积
2)大带宽工作模式更容易实现,实现更高的分辨率
3)插损变小,但是这个优势对4D雷达来讲,不是那么重要,因为4D雷达本身天线通道数大幅增加,这点插损可以忽略不计
4)可以降低高频板材的使用,但是综合成本并不一定降低,因为波导天线贵
2非对称形式的板材叠构才是出路
因为对称叠构的PCB板成本太高了,用2层甚至3层高频板材,成本hold不住。
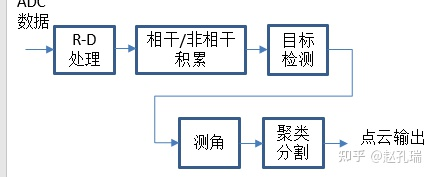
3传统信号处理流程无法形成高密度点云
在4D毫米波雷达方案设计中,一定要谨记这条假设:一切万物都是扩展目标。传统的信号处理流程,尤其是CFAR和测角模块,都是假设目标为点目标。如果还是遵循传统雷达的思路,设计出来的4D雷达是无法实现高密度点云的。而我们之所以实现单帧高密度点云,是采用了全新的雷达算法流程,具体如下:
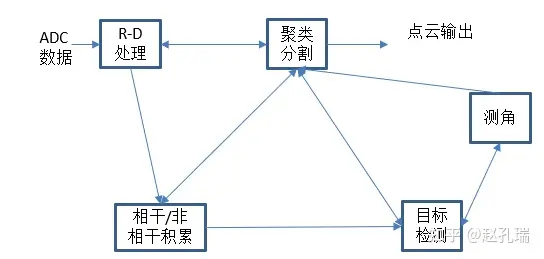
当然,除了流程变化较大外,我们的相干/非相干积累、目标检测、测角等模块跟传统的算法已经不一样了。
4雷达互干扰紧靠波形设计是避免不了的,躺平接受吧!
毫米波雷达的渗透率越来越高且4D雷达的发波的占空比越来越高,雷达间互干扰影响越来越明显,越来越严重。虽然跳频、调频、调相等复杂波形设计方法可以一定程度上减小雷达间互干扰,但是仅仅靠这些是不够的,还要结合检测、测角、点云预处理等环节综合处理才能减少雷达间互干扰的影响。
5深度学习是个好东西
4D雷达的数据体现出了对深度学习比较友好的特征,不论是R-D谱还是点云上,将来深度学习会是很好的雷达信号处理方式。这也是我们下一步的研发方向。
6稀疏阵/冗余阵也有很多问题
稀疏阵列相对均匀阵列孔径大幅增加,提高了测角精度,但是在4D毫米波雷达中也有很大的问题。比如近距离强目标,点云会发散,主要是因为栅瓣产生了强峰值,大于真实角度下的峰值。但是,通过算法优化设计也是可以解决的。
7扩展目标跟踪是个新问题
如何处理4D毫米波雷达生成的大规模点云,也是未来大家的新挑战。扩展目标跟踪虽然学术界研究了很多年,但是自动驾驶场景下还是有很多问题。首先,大部分交通目标的轮廓是方型的,不是椭圆型的。除了丢给深度学习这种偷懒的手段外,期望大佬们能够提出新的扩展目标跟踪理论框架。
总之,4D毫米波雷达开发紧紧围绕的一个假设是:万物都是扩展目标。
4D毫米波雷达虽然红得发紫,当红炸子鸡之一,但是4D毫米波雷达应该做成什么样?
从使命上来讲,4D毫米波雷达是为L3及以上的自动驾驶而生。目前已经量产的并且上车的已经有大陆的ARS540和采埃孚的4D成像雷达,它们在产品化方面可谓走在了行业的前列。但是通过实测效果来看,并没有满足大家对4D+“成像”的期待,虽然具备了高度向上的测量能力,且精度比传统的ADAS雷达有了大幅提高,点云数量很稀疏,很难成像。可能他们的重点是体现4D能力,而不是成像能力。这两款4D毫米波雷达从直观上来讲,还难以满足高级别自动驾驶的需求,还不能担当主角。
那么,衡量4D毫米波雷达综合能力的指标是什么呢?应该是单帧点云数量,也即点云成像能力(点云力)。因为在高级别自动驾驶中,参与道路交通的目标不再是点目标,而是有轮廓、形状、类别和姿态的扩展目标。只有形成高密度点云,才能精准探测道路环境中的动态目标和静态目标的精准位置信息、轮廓信息、类别信息、姿态和行为信息。点云数量高,其角度分辨率一定不会低。但是角度分辨率高,点云数量不一定高,这也是为什么业内很多4D雷达分辨率指标很高,但是点云数量不一定多的原因。因为生成高密度点云不仅涉及到测角,还涉及到雷达算法全流程的各个环节,包括2D-FFT、CFAR和测角等各个模块。
其次,4D毫米波雷达需要替代激光雷达么?
目前行业内面对4D毫米波雷达时的一个常见的疑问是:4D毫米波雷达能否替代激光雷达或者低线束激光雷达?但是,4D毫米波雷达有必要背负这样的历史使命吗?个人认为是没有必要的。自动驾驶路线肯定是多样化的,有特斯拉的纯视觉路线,有激光雷达+视觉路线,也会有4D毫米波雷达+视觉路线,甚至其他混搭路线。至于选择那种路线最优,我想没有所谓的最优解,全靠每家的算法技术能力。另外,很多人拿点云数量来对4D毫米波雷达和激光雷达对比,显然这是不恰当的。就像人类不如牛的力气大,就认为人不如牛吗?激光雷达有点云成像的优势,但是点云数量高这一个维度不是万金油。毫米波雷达有很高的测速的分辨率,以及很高的测速精度,相比激光雷达多了一个信息维度,在解决自动驾驶的很多cornercase(比如过分割和前分割问题)中起到了四两拨千斤的作用。
所以,具备高分辨点云成像能力的4D毫米波雷达和激光雷达将在高级别自动驾驶中大放异彩,平分秋色。
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)
(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









