






作者 | Amusi 编辑 | CVer
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
本文只做学术分享,如有侵权,联系删文
恭喜!何恺明(Kaiming He)个人主页官宣将于2024年入职 MIT!
PS:kaiming 换了新头像(smile)~

主页:https://kaiminghe.github.io/
今年3月何恺明在MIT求职演讲:何恺明MIT求职演讲现场:提前三小时就有排队!超百页PPT回顾CV发展!如今尘埃落定!
目前何恺明谷歌学术被引用量已高达46万!是 Computer Vision 垂直方向被引用量最高的人!
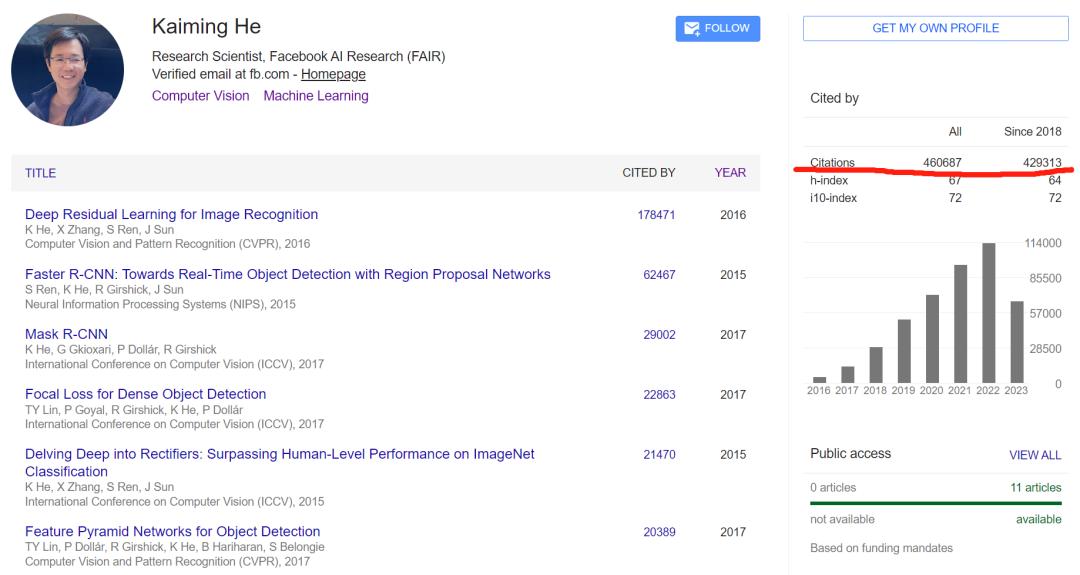
ResNet 在AI领域几乎无人不识;Faster R-CNN、Mask R-CNN 做检测、分割的同学应该都知道;MoCo 系列更是助力自监督学习浪潮;最新的一作工作MAE已被广泛用于视觉各个领域(图像/视频/3D等)。
这里浅浅回顾一下大佬的代表性工作和部分荣誉:
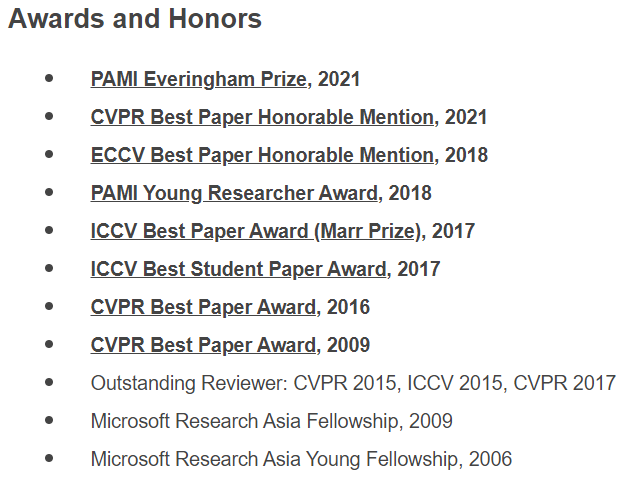
2009 CVPR Best Paper
Single Image Haze Removal Using Dark Channel Prior
2016 CVPR Best Paper
ResNet——Deep Residual Learning for Image Recognition
2017 ICCV Best Paper (Marr Prize)
Mask R-CNN
2017 ICCV Best Student Paper
Focal Loss for Dense Object Detection
2018 ECCV Best Paper Honorable Mention
Group Normalization
2019 ICCV Best Paper Nominee
Deep Hough Voting for 3D Object Detection in Point Clouds
2020 CVPR Best Paper Nominee
Momentum Contrast for Unsupervised Visual Representation Learning
2021 CVPR Best Paper Honorable Mention
Exploring Simple Siamese Representation Learning
2022 CVPR Best Paper Nominee
Masked Autoencoders Are Scalable Vision Learners
最后再次恭喜何恺明!恭喜MIT!也期待后续的新工作和新学生!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!
















 169
169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









