






点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
论文作者 | 汽车人
编辑 | 自动驾驶之心
今天自动驾驶之心和大家聊一个很重要的自动驾驶开源项目:Openpilot!Github上近43.8K star!开源链接:
https://github.com/commaai/openpilot
什么是Openpilot?
openpilot是一个开源的驾驶员辅助系统。目前,openpilot为越来越多的受支持的汽车品牌、车型和车型年份执行自适应巡航控制(ACC)、自动车道保持(ALC)、前向碰撞警告(FCW)和车道偏离警告(LDW)功能。此外,当openpilot启动时,基于camera的驾驶员监控(DM)功能会提醒分心和打瞌睡的驾驶员。

Openpilot 官方版本支持 车道保持 、ACC巡航、自动辅助变道。
车道保持:控制方向盘,使车辆保持在左右两车道正中间。
ACC巡航:检测前车、障碍物,根据前车速度调节车速(油门、刹车),与前车保持安全距离。
自动辅助变道:当驾驶员需要切换车道时,需要打开转向灯(常亮),确认变向车道安全后,然后朝变道方向轻推方向盘,车辆将驶向旁边车道,变道完成后,需要驾驶员关闭转向灯。
0.6.4 之后的版本在测试过程中发现,如果没有车道线情况下,会跟随前车轨迹行驶
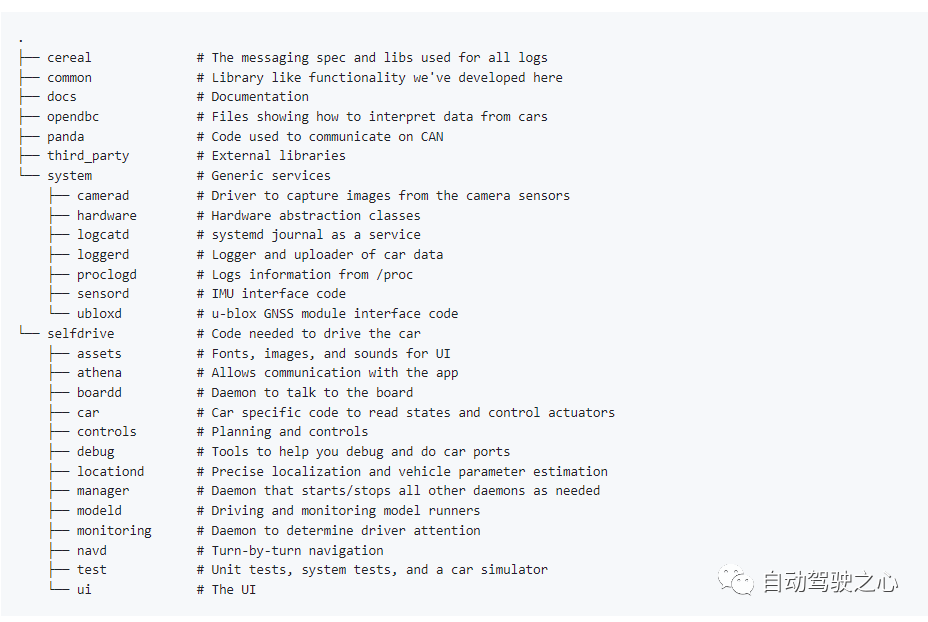
整个开源项目的目录结构
如何在自动驾驶汽车上用起来?
要在汽车中使用openpilot,需要四件事:
支持的设备:可以从以下网站购买这些设备(https://comma.ai/shop/comma-3x)
软件:设置过程允许用户输入自定义软件的URL。若要安装openpilot的发布版本,请使用URL :openpilot.comma.ai。若要安装openpilot master(适用于更高级的用户),请使用网址:installer.comma.ai/commaai/master。
支持的汽车:openpilot支持250+类汽车,包括本田、丰田、现代、日产、起亚、克莱斯勒、雷克萨斯、奥迪、大众、福特等。如果没有被正式列为支持,但具有自适应巡航控制和车道保持辅助功能,那么它很可能能够运行openpilot。
汽车线束:还需要一个汽车线束来连接到车上(可以参考:https://comma.ai/setup)
如何在电脑上跑起来?
所有openpilot服务都可以在PC上正常运行,无需特殊硬件或汽车。还可以对记录或模拟的数据运行openpilot,以开发或试验openpilot。使用openpilot的工具,可以绘制日志、回放驱动器和观看全分辨率相机流。还可以使用CARLA模拟器在模拟中运行openpilot。这允许openpilot在Ubuntu机器上驾驶虚拟汽车。整个设置应该只需要几分钟,但需要一个不错的GPU。
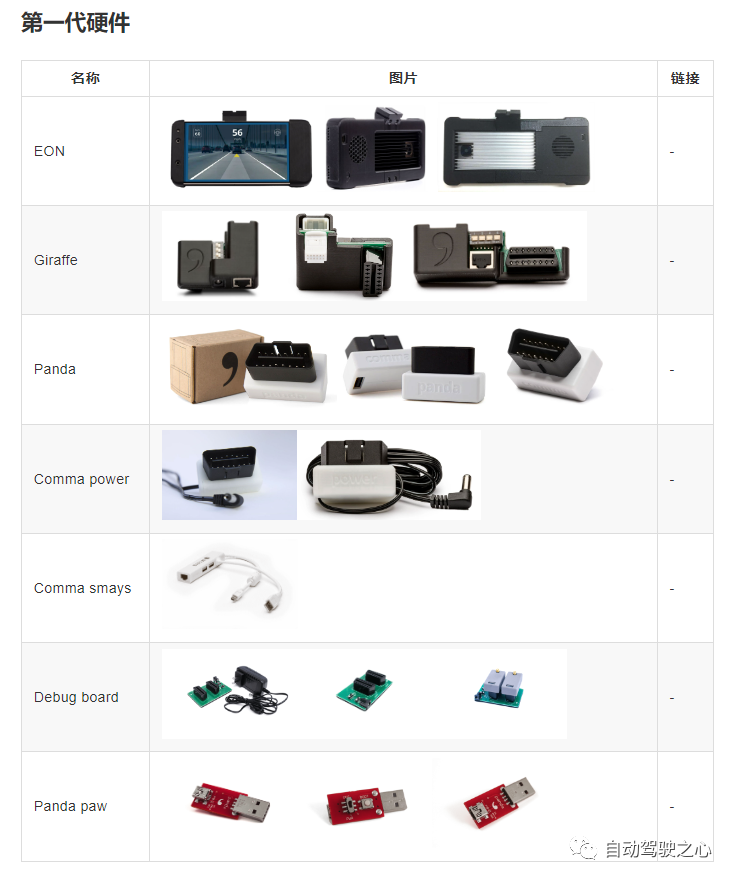
Openpilot的硬件
Openpilot 硬件一览表
第二代相比较第一代有 2 个明显改进:
体积缩小了,panda 和 harness 变成了 2 个小黑盒子,giraffe 变成了线束,可以放进原车的 ACC 盒子里,第一代不行。
新增硬件 harness ,可以检测是否连接了EON,自动切换原车和 OP,而第一代需要手动拨动开关切换。
第三代硬件 Comma2 改进:
内置 Black Panda,前置红外摄像头,可以在夜间监控驾驶员是否安全驾驶。
移除了手机电池,避免设备长时间暴晒下的高温锂电池爆炸风险。

Openpilot 有AEB吗?
Openpilot 软件本身暂时不支持 AEB 刹车,只能在激活自动驾驶的时候,检测到前方车辆或障碍物距离太近,提示用户或刹车减速。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!

















 505
505

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









