






一晃快乐的元旦假期结束了。汽车人这几天和很多业内的工程师深入聊了聊,结合最近很多平台小伙伴咨询我们的问题,有感而发,今天就和大家聊聊这两年大火的无图/轻图感知。
首先对不了解的小伙伴,最大的误区是以为无图方案没有高精地图了!错错错,无图方案只是不使用图商提供的高精地图,仍然需要使用由感知端构建出实时局部高精地图使用。但受限于硬件算力、感知范围和实时的周边信息,实时地图可能没那么准,也可能没那么稳~举个最简单的例子,像MapTR一系列的算法可以检测出车道线、车道中心线、路面边界、路口等等,这些矢量化的结果和传统高精地图没有本质的区别,因此仍然可以提供给下游使用。
其次,无图/轻图感知的边界究竟在哪里?在交流过程中,汽车人接收最多的信息是,普通路口已经基本cover住了,实时建图可以用!但超大路口(120m以上)、异形路口、复杂路口、施工路口、超大车流量等情况还没有特别好的解决方案。这就不得不聊聊无图方案的边界,这也是为什么会退而求其次选择轻图方案。普通路口使用实时建图的结果,困难场景仍然使用图商提供的高精地图。汽车人认为,无图方案还有很长的路要走,未来几年轻图方案将会是主流。
但不管怎样,去高精地图已经成为业内的主流共识。无图也好,轻图也好,最终的目的都是要在保证足够安全的前提下,让车辆有更好的驾驶体验。
以上内容均出自【自动驾驶之心知识星球】
自动驾驶之心知识星球,创办于2022年7月份,致力于打造为自动驾驶行业中的 ”黄埔军校“,目前近2400人,聚集了近50+自动驾驶行业专家为大家答疑解惑。
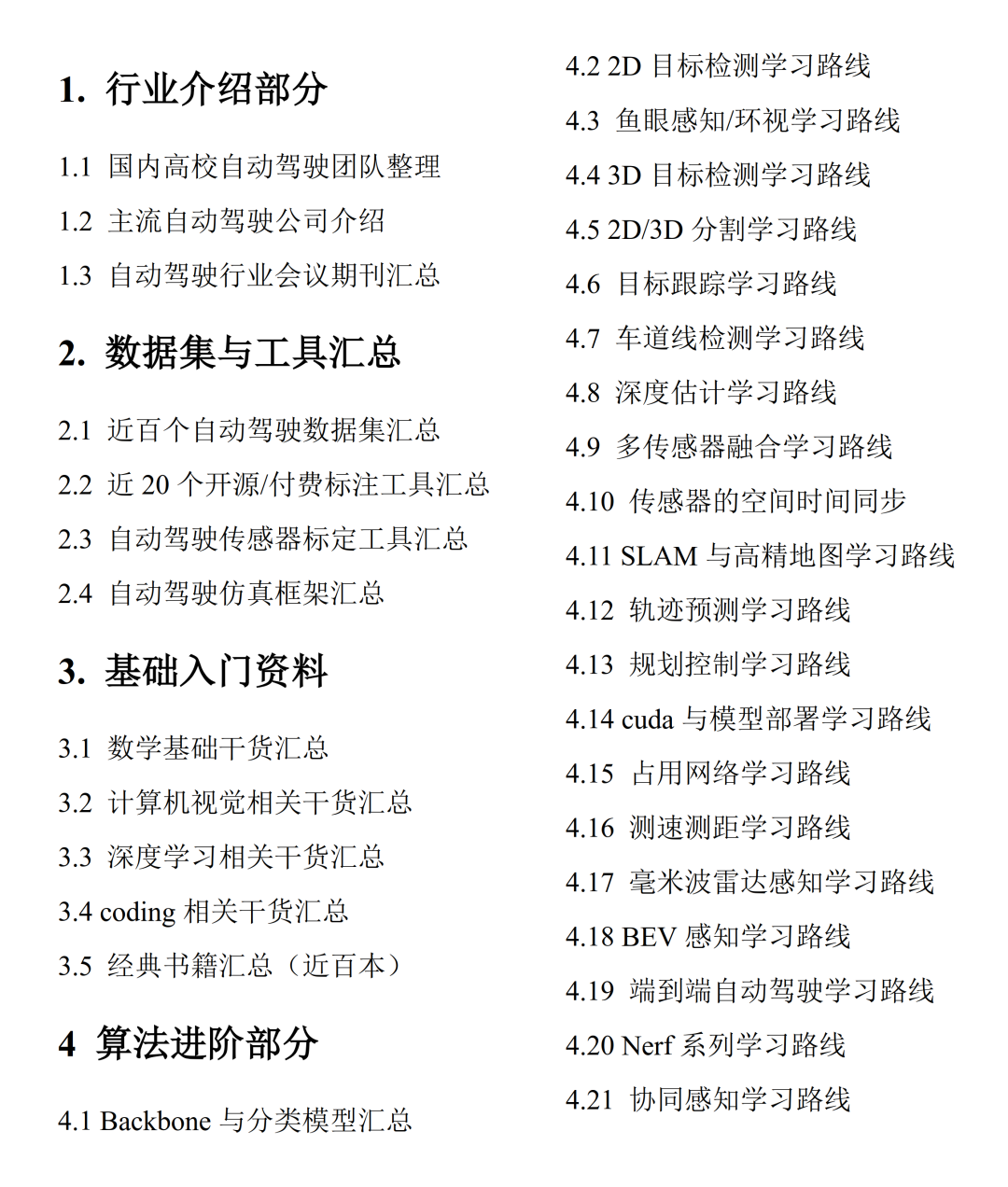
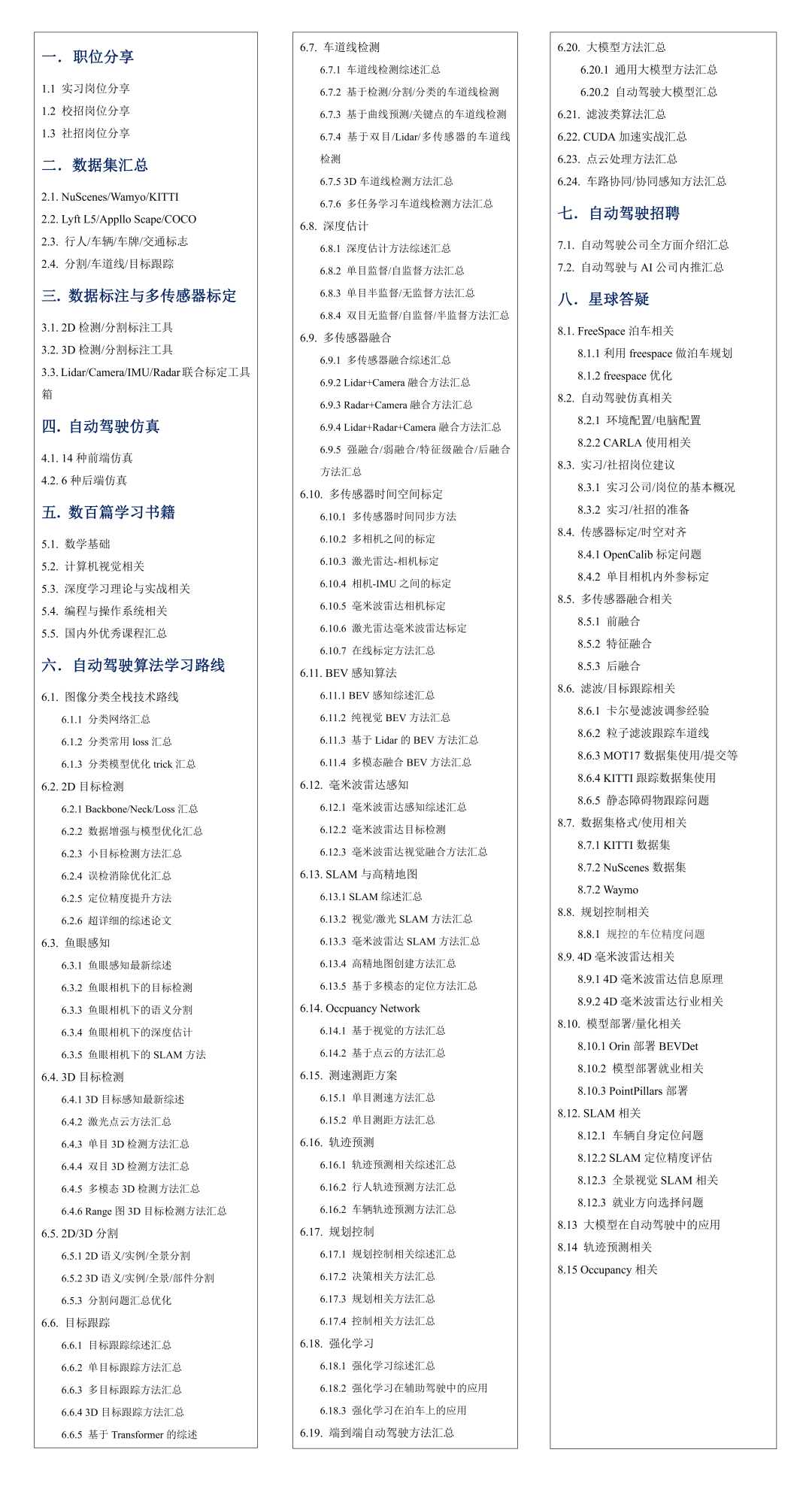
星球内已经打磨出近30+的学习路线,涉及BEV感知、动态/静态障碍物检测、多传感器融合、多传感器标定、目标跟踪、模型部署与cuda加速、仿真等方向,沉淀了大量工程上的解决方案、学术上的优化思路!星球主要内容一览:
如何持续保持跟进和输入呢?我的答案是找对圈子,让你每天能够主动和被动接受很多新的知识,包括领域知识体系的梳理、刷题、面试经验、各家企业现状、各个岗位的具体职责以及后续的职业前景等。一个人入门学习,无异于大海捞针,浪费了大把时间踩坑,还得不到想要的答案。哪里有专业回答的规划呢?这里我推荐一个我们一直在维护的社区:自动驾驶之心知识星球,目前是国内最大、最专业的自动驾驶社区。欢迎加入!
















 1575
1575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









