






自动驾驶的高速量产,成为今年火热的话题,各家公司都在为生死存亡的机会加班加点。以基于深度学习的3D目标检测算法为核心,自动驾驶系统中的目标感知模块扮演着非常重要的角色。目标感知模块通过传感器接收到3D世界中的实时信息,以此对潜在关注的目标进行尺寸、位置的预测。感知结果的准确程度,将直接影响到后续自动驾驶系统的决策准确性。可以说,3D目标检测算法是影响自动驾驶系统安全性的重要因素。

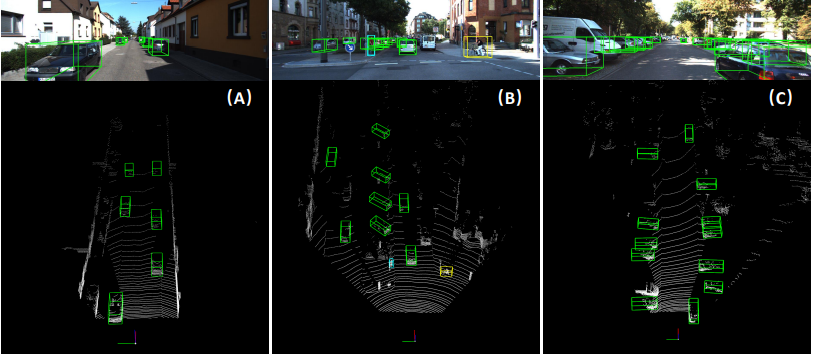
3D目标检测算法通常以激光雷达和相机作为输入信息的工具,对三维世界信息的充分采集来准确地预测障碍物的位置和尺寸。在目前层出不穷的3D目标感知算法方案中,基于激光雷达的3D目标检测仍然是学术界和工业界的主流方向之一。虽然目前很多低阶量产方案中采用纯视觉基线,但视觉本身有着3D信息的缺失的缺陷,导致漏检、误检的经常发生,性能也无法与点云方案媲美。归功于激光雷达点云数据对三维空间结构的精确采集,基于此的目标检测算法在精度上有着巨大的优势。所以很多高阶自动驾驶方案,都采用了激光雷达作为精准传感器。
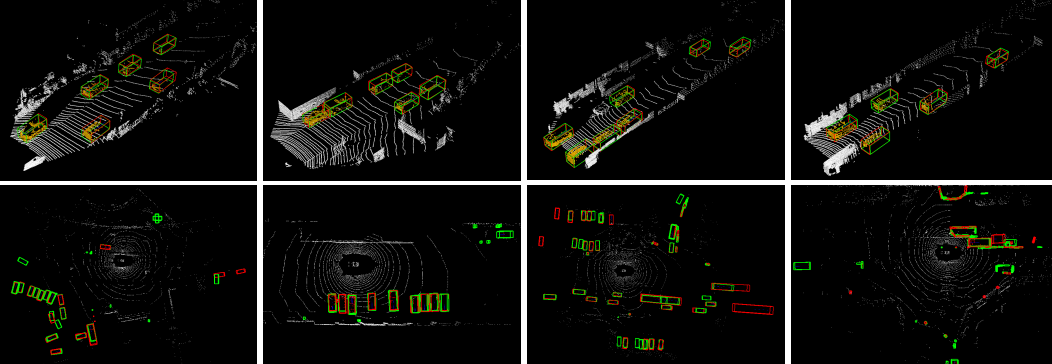
通过对激光雷达点云数据进行不同的处理方式,包括直接基于点(Point)、体素化(Voxel)、柱化(Pillar)、图(Graph)等,各类3D目标检测算法在预测精度和推理速度上达到了不同程度的平衡。目前的学术界仍然在不断产出更好、更快的先进算法,力求给3D目标检测问题一个更优秀的解决方案。
领域内对点云3D检测的需求主要有两种:高阶L3~L4自动驾驶和L2.9或L2.99的量产方案上,以及真值系统。未来随着传感器成本不断下降,相信激光雷达很快能够批量上车,成为大家都能接受的方案。目前各大自动驾驶公司和主机厂都在预研和落地点云3D检测方案,如何检测的更准更远,是当前研究的重点,各家公司不惜投入重金招聘相关领域人才。
如何学习?
相比于传统的2D目标检测算法,点云3D目标检测无论在输入数据还是模型结构方面都有着更加复杂的逻辑和流程,也因此更难上手。再加上目前点云3D目标检测还没有像2D领域那样形成具备大一统体系的流派,各类方法层出不穷,想要快速掌握其核心原理无疑难倒了许多人。
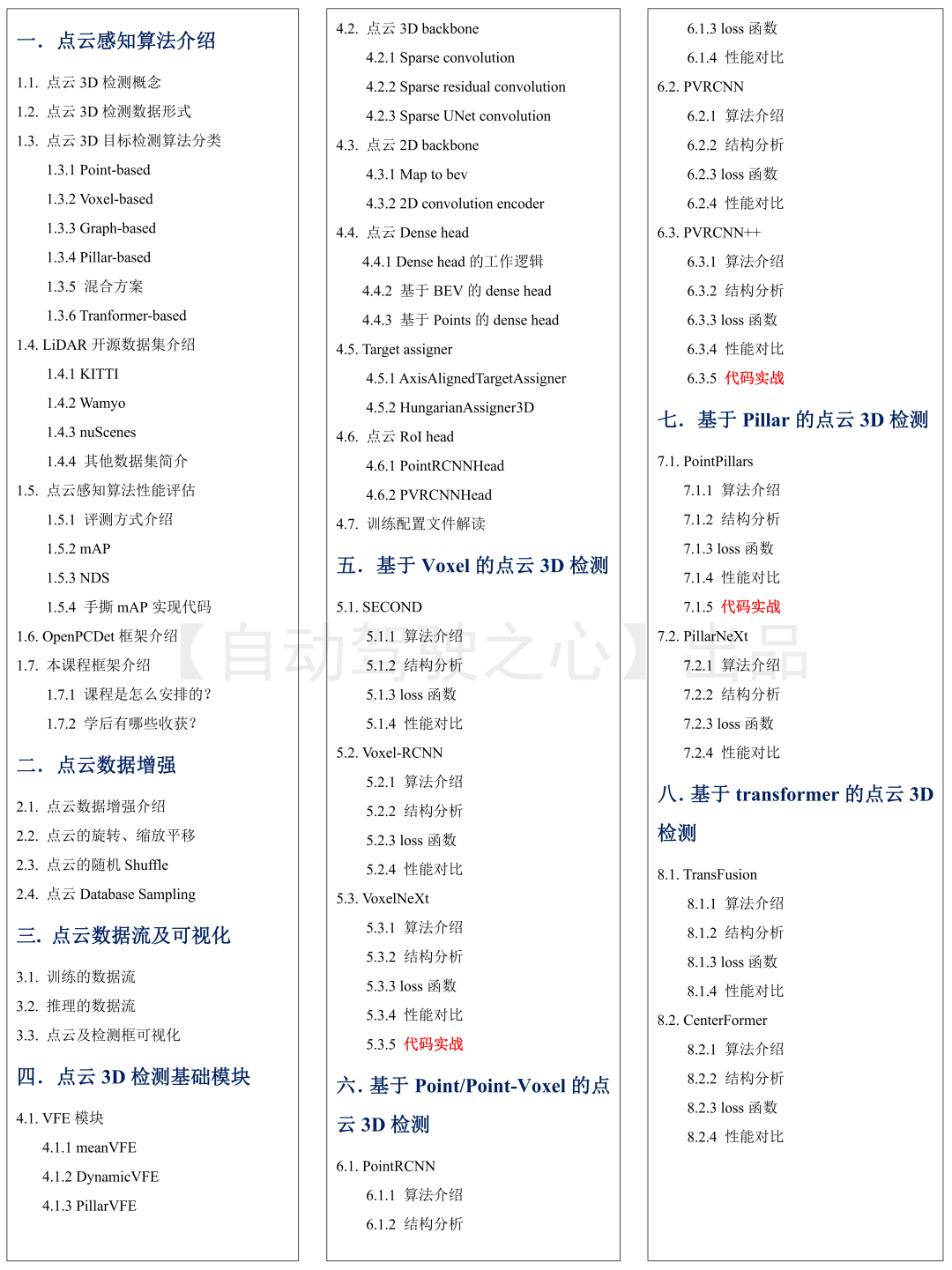
为此,自动驾驶之心联合国外知名高校博士联合自研了一套丰富的点云3D检测教程。本课程将深入浅出地介绍了3D目标检测算法的概念和核心原理,细致地讲解了主流数据集以及经典和最新的点云3D检测模型结构,带领大家一步步掌握算法流程、网络结构设计、结果评估等核心模块,涉及目前几乎所有点云深度学习模型。非常适合刚入门的小白同学以及希望更深入理解模型思路的同学。大纲如下所示:
主讲老师
主讲老师Ray,英国南安普顿大学在读博士,在自动驾驶与3D目标检测领域有着丰富的研究经验,对基于激光雷达的目标检测算法有着深入的理解。
面向对象
-
计算机视觉与自动驾驶感知相关研究方向的本科/硕士/博士;
-
点云处理、3D目标感知、点云3D检测相关方向同学;
-
工作上需要转行或提升的算法工程人员及企业技术管理人员;
具备的基础
-
具有一定的python和pyTorch基础,熟悉深度学习常用的一些基础算法;
-
对3D点云检测和点云处理等基础方案有一定了解;
-
一定的线性代数和矩阵论基础;
-
电脑需要自带GPU,能够通过CUDA加速(显存至少12GB);
学后收获
-
精通基于LiDAR点云的3D目标检测原理、网络结构设计;
-
熟练掌握OpenPCDet代码框架的结构和使用方法;
-
能够通过学习复现目前具有代表性的3D目标检测算法;
-
能够在OpenPCDet搭建自己的数据集和模型;
学习方式
历时2个半月,线下视频授课+vip群答疑;
学习课程
扫码加入学习!
扫码添加助理咨询课程!
版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!
投诉微信:AIDriver004(备注:盗版举报)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









