






作者 | 紫气东来 编辑 | 汽车人
原文链接:https://zhuanlan.zhihu.com/p/657632577
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
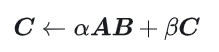
通用矩阵乘法 (General Matrix Multiplication,GEMM) 是各种模型和计算中的核心部分,同时也是评估计算硬件性能 (FLOPS) 的标准技术。本文将通过对 GEMM 的实现和优化,来试图理解高性能计算和软硬件系统。
一、GEMM的基本特征
1.1 GEMM计算过程及复杂度
GEMM 的定义为:


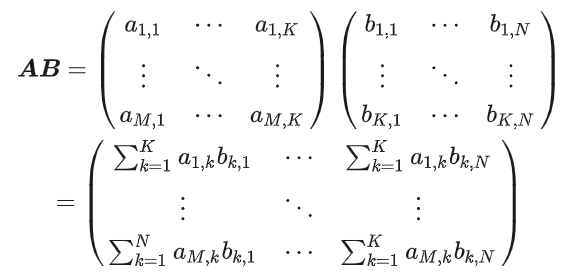


1.2 简单实现及过程分析

下面是按照原始定义实现的 CPU 上实现的代码,之后用以作为精度的对照
#define OFFSET(row, col, ld) ((row) * (ld) + (col))
void cpuSgemm(
float *a, float *b, float *c, const int M, const int N, const int K) {
for (int m = 0; m < M; m++) {
for (int n = 0; n < N; n++) {
float psum = 0.0;
for (int k = 0; k < K; k++) {
psum += a[OFFSET(m, k, K)] * b[OFFSET(k, n, N)];
}
c[OFFSET(m, n, N)] = psum;
}
}
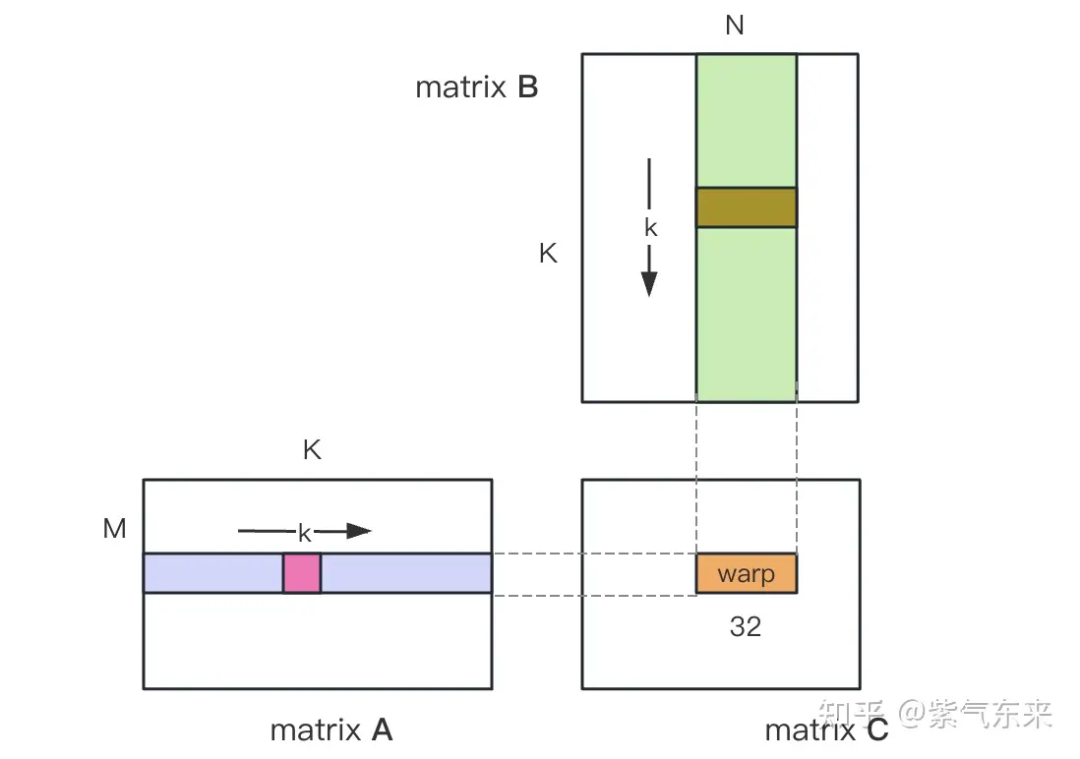
}下面使用CUDA实现最简单的矩阵乘法的Kernal,一共使用 M * N 个线程完成整个矩阵乘法。每个线程负责矩阵C中一个元素的计算,需要完成K次乘累加。矩阵A,B,C均存放与全局内存中(由修饰符 __global__ 确定),完整代码见 sgemm_naive.cu 。
__global__ void naiveSgemm(
float * __restrict__ a, float * __restrict__ b, float * __restrict__ c,
const int M, const int N, const int K) {
int n = blockIdx.x * blockDim.x + threadIdx.x;
int m = blockIdx.y * blockDim.y + threadIdx.y;
if (m < M && n < N) {
float psum = 0.0;
#pragma unroll
for (int k = 0; k < K; k++) {
psum += a[OFFSET(m, k, K)] * b[OFFSET(k, n, N)];
}
c[OFFSET(m, n, N)] = psum;
}
}
const int BM = 32, BN = 32;
const int M = 512, N = 512, K = 512;
dim3 blockDim(BN, BM);
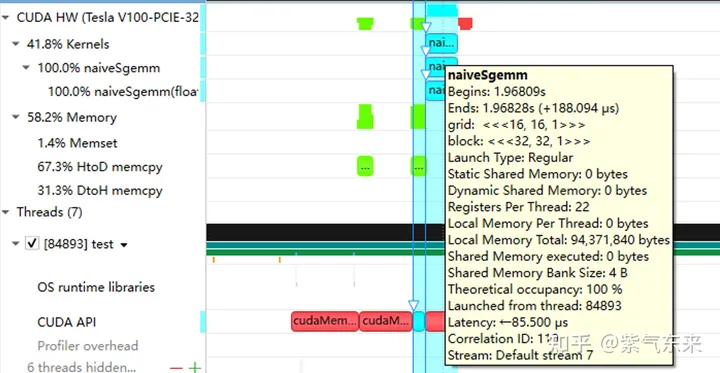
dim3 gridDim((N + BN - 1) / BN, (M + BM - 1) / BM);编译完成,在Tesla V100-PCIE-32GB上执行的结果如下,根据V100的白皮书,FP32 的峰值算力为 15.7 TFLOPS,因此该方式算力利用率仅有11.5%。
M N K = 128 128 1024, Time = 0.00010083 0.00010260 0.00010874 s, AVG Performance = 304.5951 Gflops
M N K = 192 192 1024, Time = 0.00010173 0.00010198 0.00010253 s, AVG Performance = 689.4680 Gflops
M N K = 256 256 1024, Time = 0.00010266 0.00010318 0.00010384 s, AVG Performance = 1211.4281 Gflops
M N K = 384 384 1024, Time = 0.00019475 0.00019535 0.00019594 s, AVG Performance = 1439.7206 Gflops
M N K = 512 512 1024, Time = 0.00037693 0.00037794 0.00037850 s, AVG Performance = 1322.9753 Gflops
M N K = 768 768 1024, Time = 0.00075238 0.00075558 0.00075776 s, AVG Performance = 1488.9271 Gflops
M N K = 1024 1024 1024, Time = 0.00121562 0.00121669 0.00121789 s, AVG Performance = 1643.8068 Gflops
M N K = 1536 1536 1024, Time = 0.00273072 0.00275611 0.00280208 s, AVG Performance = 1632.7386 Gflops
M N K = 2048 2048 1024, Time = 0.00487622 0.00488028 0.00488614 s, AVG Performance = 1639.2518 Gflops
M N K = 3072 3072 1024, Time = 0.01001603 0.01071136 0.01099990 s, AVG Performance = 1680.4589 Gflops
M N K = 4096 4096 1024, Time = 0.01771046 0.01792170 0.01803462 s, AVG Performance = 1785.5450 Gflops
M N K = 6144 6144 1024, Time = 0.03988969 0.03993405 0.04000595 s, AVG Performance = 1802.9724 Gflops
M N K = 8192 8192 1024, Time = 0.07119219 0.07139694 0.07160816 s, AVG Performance = 1792.7940 Gflops
M N K = 12288 12288 1024, Time = 0.15978026 0.15993242 0.16043369 s, AVG Performance = 1800.7606 Gflops
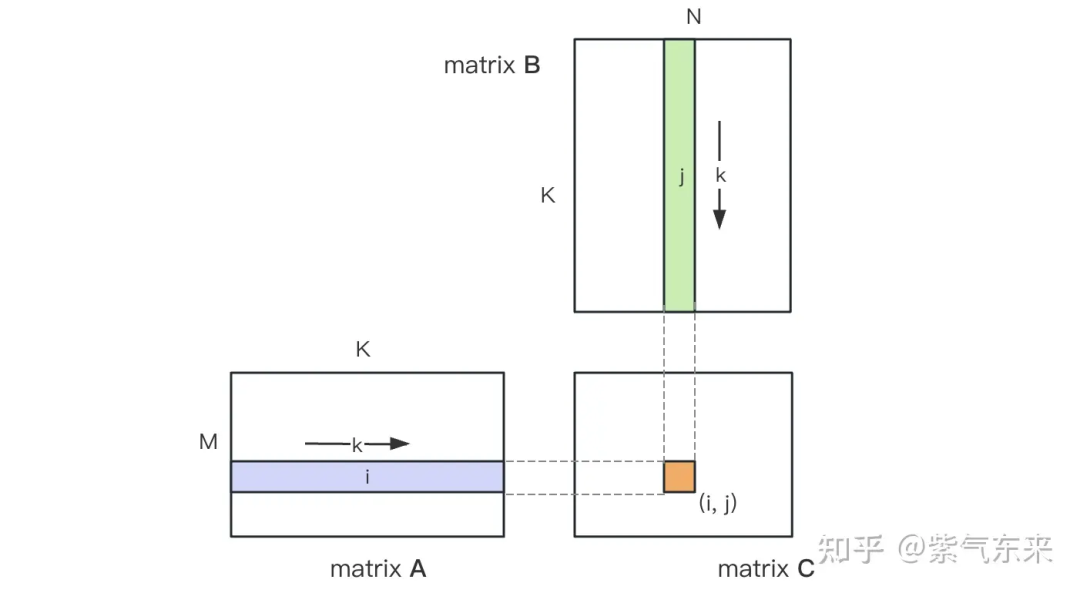
M N K = 16384 16384 1024, Time = 0.28559187 0.28567238 0.28573316 s, AVG Performance = 1792.2629 Gflops下面以M=512,K=512,N=512,为例,详细分析一下上述计算过程的workflow:
在 Global Memory 中分别为矩阵A,B,C分配存储空间.
由于矩阵C中每个元素的计算均相互独立, 因此在并行度映射中让每个thread 对应矩阵C中 1 个元素的计算.
执行配置 (execution configuration)中 gridSize 和 blockSize 均有 x(列向)、y(行向)两个维度, 其中
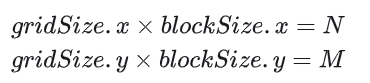


二、GEMM的优化探究
前文仅仅在功能上实现了 GEMM,性能上还远远不及预期,本节将主要研究 GEMM 性能上的优化。
2.1 矩阵分块利用Shared Memory
上述的计算需要两次Global Memory的load才能完成一次乘累加运算,计算访存比极低,没有有效的数据复用。所以可以用 Shared Memory 来减少重复的内存读取。
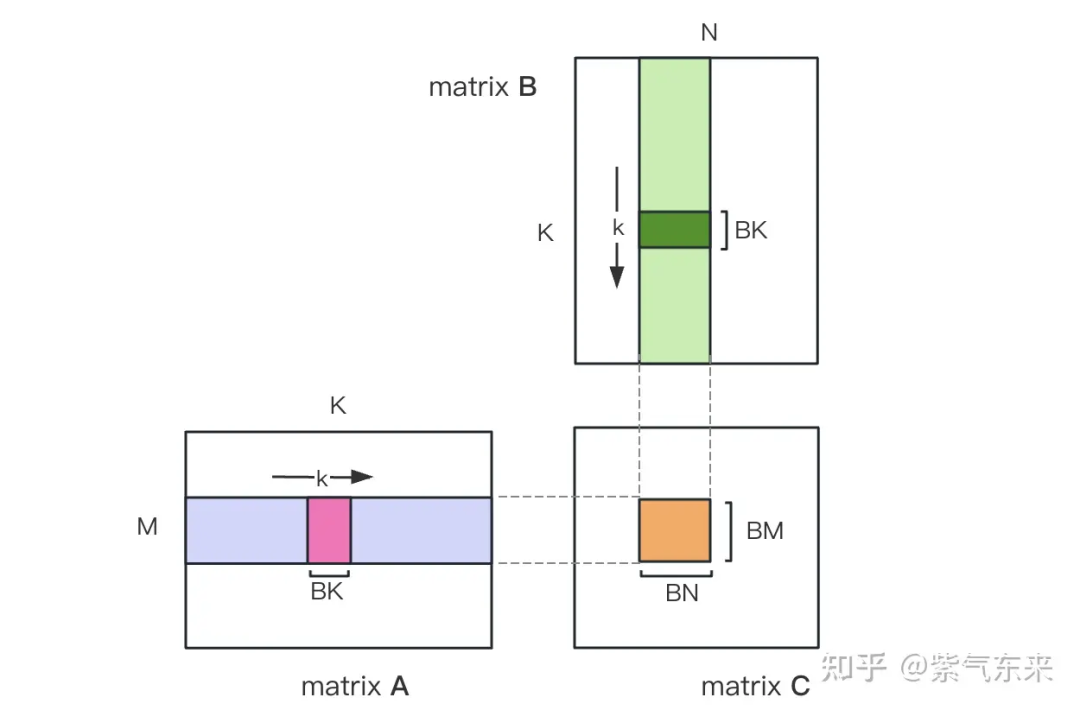
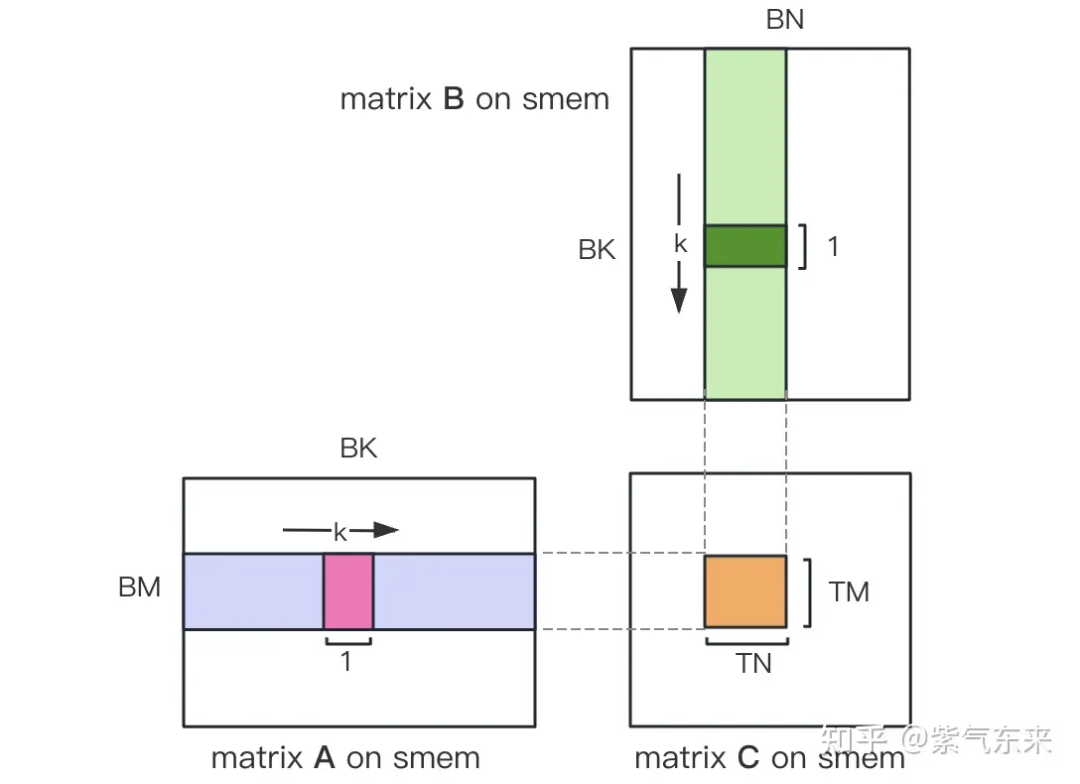
首先把矩阵C等分为BMxBN大小的分块,每个分块由一个 Block 计算,其中每个Thread负责计算矩阵C中的TMxTN个元素。之后计算所需的数据全部从 smem 中读取,就消除了一部分重复的A,B矩阵内存读取。考虑到 Shared Memory 容量有限,可以在K维上每次读取BK大小的分块,这样的循环一共需要K / BK次以完成整个矩阵乘法操作,即可得到 Block 的结果。其过程如下图所示:
利用 Shared Memory 优化后,对每一个分块,可得:
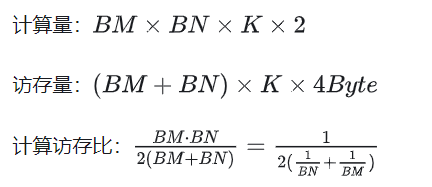
由上式可知BM和BN越大,计算访存比越高,性能就会越好。但是由于 Shared Memory 容量的限制(V100 1个SM仅96KB),而一个Block需要占用 BK * (BM + BN) * 4 Bytes大小。
TM和TN的取值也受到两方面限制,一方面是线程数的限制,一个Block中有BM / TM * BN / TN个线程,这个数字不能超过1024,且不能太高防止影响SM内Block间的并行;另一方面是寄存器数目的限制,一个线程至少需要TM * TN个寄存器用于存放矩阵C的部分和,再加上一些其它的寄存器,所有的寄存器数目不能超过256,且不能太高防止影响SM内同时并行的线程数目。
最终选取 BM = BN = 128,BK = 8,TM = TN = 8,则此时计算访存比为32。根据V100的理论算力15.7TFLOPS,可得 15.7TFLOPS/32 = 490GB/s,根据实测的HBM带宽为763GB/s,可知此时带宽不再会限制计算性能。
根据以上分析,kernel 函数实现过程如下,完整代码参见 sgemm_v1.cu,主要步骤包括:

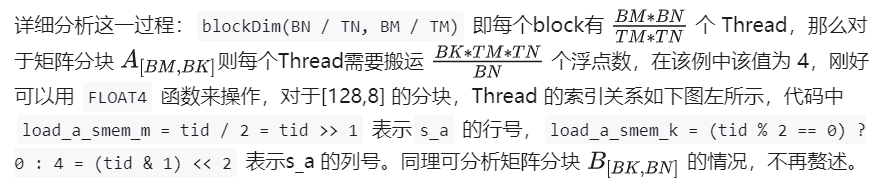
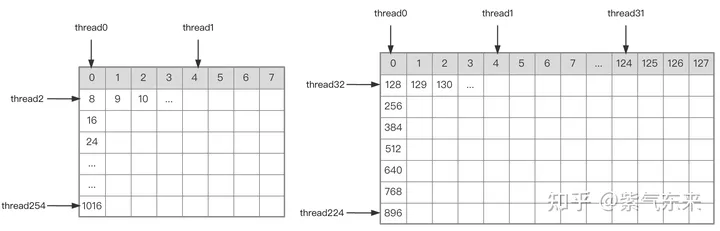
确定好单个block的执行过程,接下来需要确定多block处理的不同分块在Global Memory中的对应关系,仍然以A为例进行说明。由于分块沿着行的方向移动,那么首先需要确定行号,根据 Grid 的二维全局线性索引关系,by * BM 表示该分块的起始行号,同时我们已知load_a_smem_m 为分块内部的行号,因此全局的行号为load_a_gmem_m = by * BM + load_a_smem_m 。由于分块沿着行的方向移动,因此列是变化的,需要在循环内部计算,同样也是先计算起始列号bk * BK 加速分块内部列号load_a_smem_k 得到 load_a_gmem_k = bk * BK + load_a_smem_k ,由此我们便可以确定了分块在原始数据中的位置OFFSET(load_a_gmem_m, load_a_gmem_k, K) 。同理可分析矩阵分块 的情况,不再赘述。

计算完后,还需要将其存入 Global Memory 中,这就需要计算其在 Global Memory 中的对应关系。由于存在更小的分块,则行和列均由3部分构成:全局行号store_c_gmem_m 等于大分块的起始行号by * BM+小分块的起始行号ty * TM+小分块内部的相对行号 i 。列同理。
__global__ void sgemm_V1(
float * __restrict__ a, float * __restrict__ b, float * __restrict__ c,
const int M, const int N, const int K) {
const int BM = 128;
const int BN = 128;
const int BK = 8;
const int TM = 8;
const int TN = 8;
const int bx = blockIdx.x;
const int by = blockIdx.y;
const int tx = threadIdx.x;
const int ty = threadIdx.y;
const int tid = ty * blockDim.x + tx;
__shared__ float s_a[BM][BK];
__shared__ float s_b[BK][BN];
float r_c[TM][TN] = {0.0};
int load_a_smem_m = tid >> 1; // tid/2, row of s_a
int load_a_smem_k = (tid & 1) << 2; // (tid % 2 == 0) ? 0 : 4, col of s_a
int load_b_smem_k = tid >> 5; // tid/32, row of s_b
int load_b_smem_n = (tid & 31) << 2; // (tid % 32) * 4, col of s_b
int load_a_gmem_m = by * BM + load_a_smem_m; // global row of a
int load_b_gmem_n = bx * BN + load_b_smem_n; // global col of b
for (int bk = 0; bk < (K + BK - 1) / BK; bk++) {
int load_a_gmem_k = bk * BK + load_a_smem_k; // global col of a
int load_a_gmem_addr = OFFSET(load_a_gmem_m, load_a_gmem_k, K);
FLOAT4(s_a[load_a_smem_m][load_a_smem_k]) = FLOAT4(a[load_a_gmem_addr]);
int load_b_gmem_k = bk * BK + load_b_smem_k; // global row of b
int load_b_gmem_addr = OFFSET(load_b_gmem_k, load_b_gmem_n, N);
FLOAT4(s_b[load_b_smem_k][load_b_smem_n]) = FLOAT4(b[load_b_gmem_addr]);
__syncthreads();
#pragma unroll
for (int k = 0; k < BK; k++) {
#pragma unroll
for (int m = 0; m < TM; m++) {
#pragma unroll
for (int n = 0; n < TN; n++) {
int comp_a_smem_m = ty * TM + m;
int comp_b_smem_n = tx * TN + n;
r_c[m][n] += s_a[comp_a_smem_m][k] * s_b[k][comp_b_smem_n];
}
}
}
__syncthreads();
}
#pragma unroll
for (int i = 0; i < TM; i++) {
int store_c_gmem_m = by * BM + ty * TM + i;
#pragma unroll
for (int j = 0; j < TN; j += 4) {
int store_c_gmem_n = bx * BN + tx * TN + j;
int store_c_gmem_addr = OFFSET(store_c_gmem_m, store_c_gmem_n, N);
FLOAT4(c[store_c_gmem_addr]) = FLOAT4(r_c[i][j]);
}
}
}计算结果如下,性能达到了理论峰值性能的51.7%:
M N K = 128 128 1024, Time = 0.00031578 0.00031727 0.00032288 s, AVG Performance = 98.4974 Gflops
M N K = 192 192 1024, Time = 0.00031638 0.00031720 0.00031754 s, AVG Performance = 221.6661 Gflops
M N K = 256 256 1024, Time = 0.00031488 0.00031532 0.00031606 s, AVG Performance = 396.4287 Gflops
M N K = 384 384 1024, Time = 0.00031686 0.00031814 0.00032080 s, AVG Performance = 884.0425 Gflops
M N K = 512 512 1024, Time = 0.00031814 0.00032007 0.00032493 s, AVG Performance = 1562.1563 Gflops
M N K = 768 768 1024, Time = 0.00032397 0.00034419 0.00034848 s, AVG Performance = 3268.5245 Gflops
M N K = 1024 1024 1024, Time = 0.00034570 0.00034792 0.00035331 s, AVG Performance = 5748.3952 Gflops
M N K = 1536 1536 1024, Time = 0.00068797 0.00068983 0.00069094 s, AVG Performance = 6523.3424 Gflops
M N K = 2048 2048 1024, Time = 0.00136173 0.00136552 0.00136899 s, AVG Performance = 5858.5604 Gflops
M N K = 3072 3072 1024, Time = 0.00271910 0.00273115 0.00274006 s, AVG Performance = 6590.6331 Gflops
M N K = 4096 4096 1024, Time = 0.00443805 0.00445964 0.00446883 s, AVG Performance = 7175.4698 Gflops
M N K = 6144 6144 1024, Time = 0.00917891 0.00950608 0.00996963 s, AVG Performance = 7574.0999 Gflops
M N K = 8192 8192 1024, Time = 0.01628838 0.01645271 0.01660790 s, AVG Performance = 7779.8733 Gflops
M N K = 12288 12288 1024, Time = 0.03592557 0.03597434 0.03614323 s, AVG Performance = 8005.7066 Gflops
M N K = 16384 16384 1024, Time = 0.06304122 0.06306373 0.06309302 s, AVG Performance = 8118.7715 Gflops下面仍以M=512,K=512,N=512为例,分析一下结果。首先通过 profiling 可以看到 Shared Memory 占用为 8192 bytes,这与理论上(128+128)X8X4完全一致。
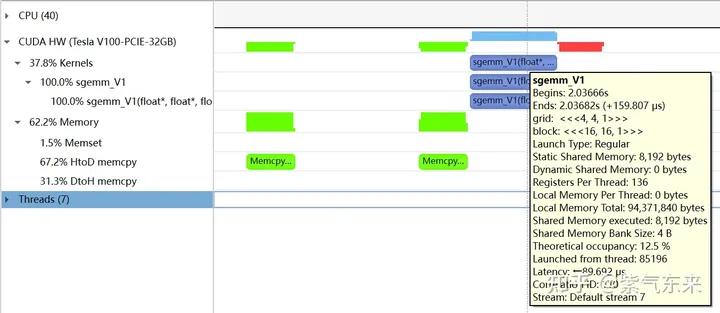
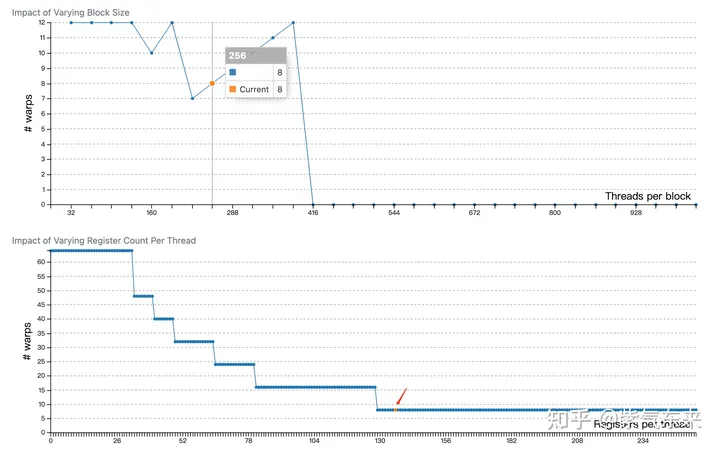
profiling 显示 Occupancy 为 12.5%,可以通过 cuda-calculator 加以印证,该例中 threads per block = 256, Registers per thread = 136, 由此可以计算得到每个SM中活跃的 warp 为8,而对于V100,每个SM中的 warp 总数为64,因此 Occupancy 为 8/64 = 12.5%。
2.2 解决 Bank Conflict 问题
上节通过利用 Shared Memory 大幅提高了访存效率,进而提高了性能,本节将进一步优化 Shared Memory 的使用。
Shared Memory一共划分为32个Bank,每个Bank的宽度为4 Bytes,如果需要访问同一个Bank的多个数据,就会发生Bank Conflict。例如一个Warp的32个线程,如果访问的地址分别为0、4、8、...、124,就不会发生Bank Conflict,只占用Shared Memory一拍的时间;如果访问的地址为0、8、16、...、248,这样一来地址0和地址128对应的数据位于同一Bank、地址4和地址132对应的数据位于同一Bank,以此类推,那么就需要占用Shared Memory两拍的时间才能读出。

再看 V1 版本计算部分的三层循环,每次从Shared memory中取矩阵A的长度为TM的向量和矩阵B的长度为TN的向量,这两个向量做外积并累加到部分和中,一次外积共TM * TN次乘累加,一共需要循环BK次取数和外积。
接下来分析从Shared Memory load的过程中存在的Bank Conflict:
i) 取矩阵A需要取一个列向量,而矩阵A在Shared Memory中是按行存储的;
ii) 在TM = TN = 8的情况下,无论矩阵A还是矩阵B,从Shared Memory中取数时需要取连续的8个数,即便用LDS.128指令一条指令取四个数,也需要两条指令,由于一个线程的两条load指令的地址是连续的,那么同一个Warp不同线程的同一条load指令的访存地址就是被间隔开的,便存在着 Bank Conflict。
为了解决上述的两点Shared Memory的Bank Conflict,采用了一下两点优化:
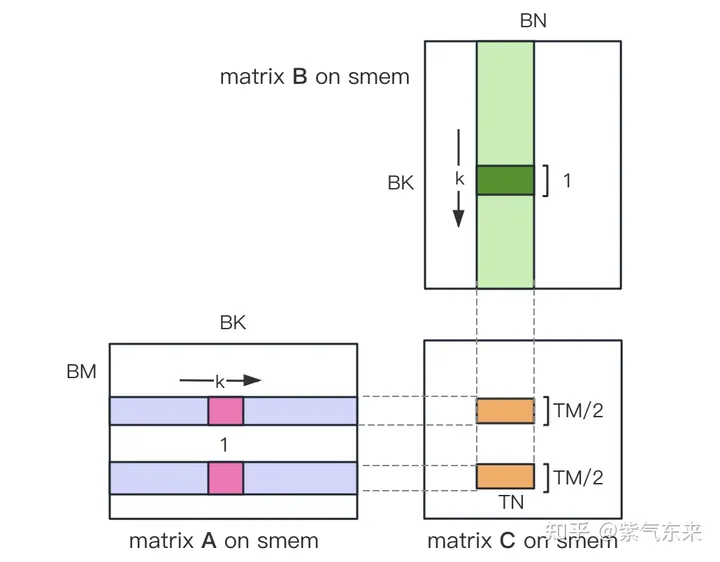
i) 为矩阵A分配Shared Memory时形状分配为[BK][BM],即让矩阵A在Shared Memory中按列存储
ii) 将原本每个线程负责计算的TM * TN的矩阵C,划分为下图中这样的两块TM/2 * TN的矩阵C,由于TM/2=4,一条指令即可完成A的一块的load操作,两个load可同时进行。
kernel 函数的核心部分实现如下,完整代码见 sgemm_v2.cu 。
__shared__ float s_a[BK][BM];
__shared__ float s_b[BK][BN];
float r_load_a[4];
float r_load_b[4];
float r_comp_a[TM];
float r_comp_b[TN];
float r_c[TM][TN] = {0.0};
int load_a_smem_m = tid >> 1;
int load_a_smem_k = (tid & 1) << 2;
int load_b_smem_k = tid >> 5;
int load_b_smem_n = (tid & 31) << 2;
int load_a_gmem_m = by * BM + load_a_smem_m;
int load_b_gmem_n = bx * BN + load_b_smem_n;
for (int bk = 0; bk < (K + BK - 1) / BK; bk++) {
int load_a_gmem_k = bk * BK + load_a_smem_k;
int load_a_gmem_addr = OFFSET(load_a_gmem_m, load_a_gmem_k, K);
int load_b_gmem_k = bk * BK + load_b_smem_k;
int load_b_gmem_addr = OFFSET(load_b_gmem_k, load_b_gmem_n, N);
FLOAT4(r_load_a[0]) = FLOAT4(a[load_a_gmem_addr]);
FLOAT4(r_load_b[0]) = FLOAT4(b[load_b_gmem_addr]);
s_a[load_a_smem_k ][load_a_smem_m] = r_load_a[0];
s_a[load_a_smem_k + 1][load_a_smem_m] = r_load_a[1];
s_a[load_a_smem_k + 2][load_a_smem_m] = r_load_a[2];
s_a[load_a_smem_k + 3][load_a_smem_m] = r_load_a[3];
FLOAT4(s_b[load_b_smem_k][load_b_smem_n]) = FLOAT4(r_load_b[0]);
__syncthreads();
#pragma unroll
for (int tk = 0; tk < BK; tk++) {
FLOAT4(r_comp_a[0]) = FLOAT4(s_a[tk][ty * TM / 2 ]);
FLOAT4(r_comp_a[4]) = FLOAT4(s_a[tk][ty * TM / 2 + BM / 2]);
FLOAT4(r_comp_b[0]) = FLOAT4(s_b[tk][tx * TN / 2 ]);
FLOAT4(r_comp_b[4]) = FLOAT4(s_b[tk][tx * TN / 2 + BN / 2]);
#pragma unroll
for (int tm = 0; tm < TM; tm++) {
#pragma unroll
for (int tn = 0; tn < TN; tn++) {
r_c[tm][tn] += r_comp_a[tm] * r_comp_b[tn];
}
}
}
__syncthreads();
}
#pragma unroll
for (int i = 0; i < TM / 2; i++) {
int store_c_gmem_m = by * BM + ty * TM / 2 + i;
int store_c_gmem_n = bx * BN + tx * TN / 2;
int store_c_gmem_addr = OFFSET(store_c_gmem_m, store_c_gmem_n, N);
FLOAT4(c[store_c_gmem_addr]) = FLOAT4(r_c[i][0]);
FLOAT4(c[store_c_gmem_addr + BN / 2]) = FLOAT4(r_c[i][4]);
}
#pragma unroll
for (int i = 0; i < TM / 2; i++) {
int store_c_gmem_m = by * BM + BM / 2 + ty * TM / 2 + i;
int store_c_gmem_n = bx * BN + tx * TN / 2;
int store_c_gmem_addr = OFFSET(store_c_gmem_m, store_c_gmem_n, N);
FLOAT4(c[store_c_gmem_addr]) = FLOAT4(r_c[i + TM / 2][0]);
FLOAT4(c[store_c_gmem_addr + BN / 2]) = FLOAT4(r_c[i + TM / 2][4]);
}结果如下,相对未解决 Bank Conflict 版(V1) 性能提高了 14.4%,达到了理论峰值的74.3%。
M N K = 128 128 1024, Time = 0.00029699 0.00029918 0.00030989 s, AVG Performance = 104.4530 Gflops
M N K = 192 192 1024, Time = 0.00029776 0.00029828 0.00029882 s, AVG Performance = 235.7252 Gflops
M N K = 256 256 1024, Time = 0.00029485 0.00029530 0.00029619 s, AVG Performance = 423.2949 Gflops
M N K = 384 384 1024, Time = 0.00029734 0.00029848 0.00030090 s, AVG Performance = 942.2843 Gflops
M N K = 512 512 1024, Time = 0.00029853 0.00029945 0.00030070 s, AVG Performance = 1669.7479 Gflops
M N K = 768 768 1024, Time = 0.00030458 0.00032467 0.00032790 s, AVG Performance = 3465.1038 Gflops
M N K = 1024 1024 1024, Time = 0.00032406 0.00032494 0.00032621 s, AVG Performance = 6155.0281 Gflops
M N K = 1536 1536 1024, Time = 0.00047990 0.00048224 0.00048461 s, AVG Performance = 9331.3912 Gflops
M N K = 2048 2048 1024, Time = 0.00094426 0.00094636 0.00094992 s, AVG Performance = 8453.4569 Gflops
M N K = 3072 3072 1024, Time = 0.00187866 0.00188096 0.00188538 s, AVG Performance = 9569.5816 Gflops
M N K = 4096 4096 1024, Time = 0.00312589 0.00319050 0.00328147 s, AVG Performance = 10029.7885 Gflops
M N K = 6144 6144 1024, Time = 0.00641280 0.00658940 0.00703498 s, AVG Performance = 10926.6372 Gflops
M N K = 8192 8192 1024, Time = 0.01101130 0.01116194 0.01122950 s, AVG Performance = 11467.5446 Gflops
M N K = 12288 12288 1024, Time = 0.02464854 0.02466705 0.02469344 s, AVG Performance = 11675.4946 Gflops
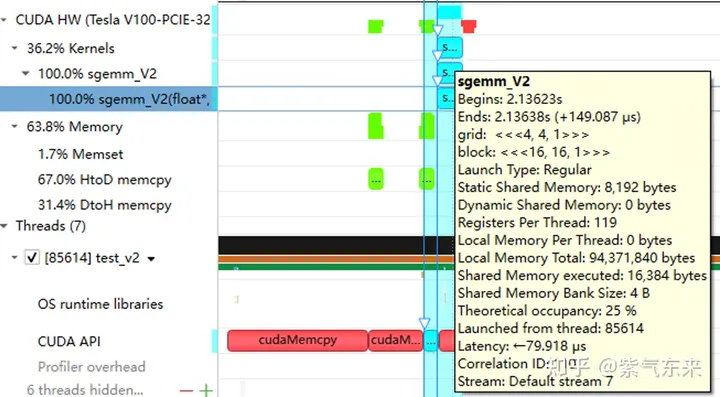
M N K = 16384 16384 1024, Time = 0.04385955 0.04387468 0.04388355 s, AVG Performance = 11669.5995 Gflops分析一下 profiling 可以看到 Static Shared Memory 仍然是使用了8192 Bytes,奇怪的的是,Shared Memory executed 却翻倍变成了 16384 Bytes(知友如果知道原因可以告诉我一下)。
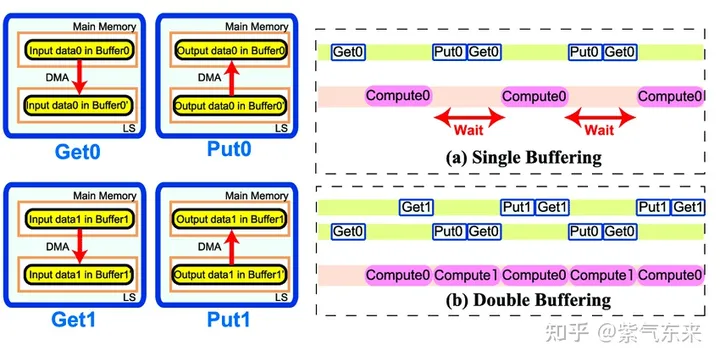
2.3 流水并行化:Double Buffering
Double Buffering,即双缓冲,即通过增加buffer的方式,使得 访存-计算 的串行模式流水线化,以减少等待时间,提高计算效率,其原理如下图所示:
具体到 GEMM 任务中来,就是需要两倍的Shared Memory,之前只需要BK * (BM + BN) * 4 Bytes的Shared Memory,采用Double Buffering之后需要2BK * (BM + BN) * 4 Bytes的Shared Memory,然后使其 pipeline 流动起来。
代码核心部分如下所示,完整代码参见 sgemm_v3.cu 。有以下几点需要注意:
1)主循环从bk = 1 开始,第一次数据加载在主循环之前,最后一次计算在主循环之后,这是pipeline 的特点决定的;
2)由于计算和下一次访存使用的Shared Memory不同,因此主循环中每次循环只需要一次__syncthreads()即可
3)由于GPU不能向CPU那样支持乱序执行,主循环中需要先将下一次循环计算需要的Gloabal Memory中的数据load 到寄存器,然后进行本次计算,之后再将load到寄存器中的数据写到Shared Memory,这样在LDG指令向Global Memory做load时,不会影响后续FFMA及其它运算指令的 launch 执行,也就达到了Double Buffering的目的。
__shared__ float s_a[2][BK][BM];
__shared__ float s_b[2][BK][BN];
float r_load_a[4];
float r_load_b[4];
float r_comp_a[TM];
float r_comp_b[TN];
float r_c[TM][TN] = {0.0};
int load_a_smem_m = tid >> 1;
int load_a_smem_k = (tid & 1) << 2;
int load_b_smem_k = tid >> 5;
int load_b_smem_n = (tid & 31) << 2;
int load_a_gmem_m = by * BM + load_a_smem_m;
int load_b_gmem_n = bx * BN + load_b_smem_n;
{
int load_a_gmem_k = load_a_smem_k;
int load_a_gmem_addr = OFFSET(load_a_gmem_m, load_a_gmem_k, K);
int load_b_gmem_k = load_b_smem_k;
int load_b_gmem_addr = OFFSET(load_b_gmem_k, load_b_gmem_n, N);
FLOAT4(r_load_a[0]) = FLOAT4(a[load_a_gmem_addr]);
FLOAT4(r_load_b[0]) = FLOAT4(b[load_b_gmem_addr]);
s_a[0][load_a_smem_k ][load_a_smem_m] = r_load_a[0];
s_a[0][load_a_smem_k + 1][load_a_smem_m] = r_load_a[1];
s_a[0][load_a_smem_k + 2][load_a_smem_m] = r_load_a[2];
s_a[0][load_a_smem_k + 3][load_a_smem_m] = r_load_a[3];
FLOAT4(s_b[0][load_b_smem_k][load_b_smem_n]) = FLOAT4(r_load_b[0]);
}
for (int bk = 1; bk < (K + BK - 1) / BK; bk++) {
int smem_sel = (bk - 1) & 1;
int smem_sel_next = bk & 1;
int load_a_gmem_k = bk * BK + load_a_smem_k;
int load_a_gmem_addr = OFFSET(load_a_gmem_m, load_a_gmem_k, K);
int load_b_gmem_k = bk * BK + load_b_smem_k;
int load_b_gmem_addr = OFFSET(load_b_gmem_k, load_b_gmem_n, N);
FLOAT4(r_load_a[0]) = FLOAT4(a[load_a_gmem_addr]);
FLOAT4(r_load_b[0]) = FLOAT4(b[load_b_gmem_addr]);
#pragma unroll
for (int tk = 0; tk < BK; tk++) {
FLOAT4(r_comp_a[0]) = FLOAT4(s_a[smem_sel][tk][ty * TM / 2 ]);
FLOAT4(r_comp_a[4]) = FLOAT4(s_a[smem_sel][tk][ty * TM / 2 + BM / 2]);
FLOAT4(r_comp_b[0]) = FLOAT4(s_b[smem_sel][tk][tx * TN / 2 ]);
FLOAT4(r_comp_b[4]) = FLOAT4(s_b[smem_sel][tk][tx * TN / 2 + BN / 2]);
#pragma unroll
for (int tm = 0; tm < TM; tm++) {
#pragma unroll
for (int tn = 0; tn < TN; tn++) {
r_c[tm][tn] += r_comp_a[tm] * r_comp_b[tn];
}
}
}
s_a[smem_sel_next][load_a_smem_k ][load_a_smem_m] = r_load_a[0];
s_a[smem_sel_next][load_a_smem_k + 1][load_a_smem_m] = r_load_a[1];
s_a[smem_sel_next][load_a_smem_k + 2][load_a_smem_m] = r_load_a[2];
s_a[smem_sel_next][load_a_smem_k + 3][load_a_smem_m] = r_load_a[3];
FLOAT4(s_b[smem_sel_next][load_b_smem_k][load_b_smem_n]) = FLOAT4(r_load_b[0]);
__syncthreads();
}
#pragma unroll
for (int tk = 0; tk < BK; tk++) {
FLOAT4(r_comp_a[0]) = FLOAT4(s_a[1][tk][ty * TM / 2 ]);
FLOAT4(r_comp_a[4]) = FLOAT4(s_a[1][tk][ty * TM / 2 + BM / 2]);
FLOAT4(r_comp_b[0]) = FLOAT4(s_b[1][tk][tx * TN / 2 ]);
FLOAT4(r_comp_b[4]) = FLOAT4(s_b[1][tk][tx * TN / 2 + BN / 2]);
#pragma unroll
for (int tm = 0; tm < TM; tm++) {
#pragma unroll
for (int tn = 0; tn < TN; tn++) {
r_c[tm][tn] += r_comp_a[tm] * r_comp_b[tn];
}
}
}
#pragma unroll
for (int i = 0; i < TM / 2; i++) {
int store_c_gmem_m = by * BM + ty * TM / 2 + i;
int store_c_gmem_n = bx * BN + tx * TN / 2;
int store_c_gmem_addr = OFFSET(store_c_gmem_m, store_c_gmem_n, N);
FLOAT4(c[store_c_gmem_addr]) = FLOAT4(r_c[i][0]);
FLOAT4(c[store_c_gmem_addr + BN / 2]) = FLOAT4(r_c[i][4]);
}
#pragma unroll
for (int i = 0; i < TM / 2; i++) {
int store_c_gmem_m = by * BM + BM / 2 + ty * TM / 2 + i;
int store_c_gmem_n = bx * BN + tx * TN / 2;
int store_c_gmem_addr = OFFSET(store_c_gmem_m, store_c_gmem_n, N);
FLOAT4(c[store_c_gmem_addr]) = FLOAT4(r_c[i + TM / 2][0]);
FLOAT4(c[store_c_gmem_addr + BN / 2]) = FLOAT4(r_c[i + TM / 2][4]);
}性能如下所示,达到了理论峰值的 80.6%。
M N K = 128 128 1024, Time = 0.00024000 0.00024240 0.00025792 s, AVG Performance = 128.9191 Gflops
M N K = 192 192 1024, Time = 0.00024000 0.00024048 0.00024125 s, AVG Performance = 292.3840 Gflops
M N K = 256 256 1024, Time = 0.00024029 0.00024114 0.00024272 s, AVG Performance = 518.3728 Gflops
M N K = 384 384 1024, Time = 0.00024070 0.00024145 0.00024198 s, AVG Performance = 1164.8394 Gflops
M N K = 512 512 1024, Time = 0.00024173 0.00024237 0.00024477 s, AVG Performance = 2062.9786 Gflops
M N K = 768 768 1024, Time = 0.00024291 0.00024540 0.00026010 s, AVG Performance = 4584.3820 Gflops
M N K = 1024 1024 1024, Time = 0.00024534 0.00024631 0.00024941 s, AVG Performance = 8119.7302 Gflops
M N K = 1536 1536 1024, Time = 0.00045712 0.00045780 0.00045872 s, AVG Performance = 9829.5167 Gflops
M N K = 2048 2048 1024, Time = 0.00089632 0.00089970 0.00090656 s, AVG Performance = 8891.8924 Gflops
M N K = 3072 3072 1024, Time = 0.00177891 0.00178289 0.00178592 s, AVG Performance = 10095.9883 Gflops
M N K = 4096 4096 1024, Time = 0.00309763 0.00310057 0.00310451 s, AVG Performance = 10320.6843 Gflops
M N K = 6144 6144 1024, Time = 0.00604826 0.00619887 0.00663078 s, AVG Performance = 11615.0253 Gflops
M N K = 8192 8192 1024, Time = 0.01031738 0.01045051 0.01048861 s, AVG Performance = 12248.2036 Gflops
M N K = 12288 12288 1024, Time = 0.02283978 0.02285837 0.02298272 s, AVG Performance = 12599.3212 Gflops
M N K = 16384 16384 1024, Time = 0.04043287 0.04044823 0.04046151 s, AVG Performance = 12658.1556 Gflops从 profiling 可以看到双倍的 Shared Memory 的占用

三、cuBLAS 实现方式探究
本节我们将认识CUDA的标准库——cuBLAS, 即NVIDIA版本的基本线性代数子程序 (Basic Linear Algebra Subprograms, BLAS) 规范实现代码。它支持 Level 1 (向量与向量运算) ,Level 2 (向量与矩阵运算) ,Level 3 (矩阵与矩阵运算) 级别的标准矩阵运算。
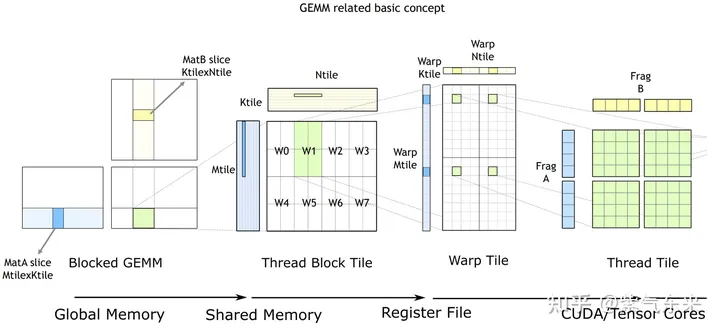
如上图所示,计算过程分解成线程块片(thread block tile)、线程束片(warp tile)和线程片(thread tile)的层次结构并将AMP的策略应用于此层次结构来高效率的完成基于GPU的拆分成tile的GEMM。这个层次结构紧密地反映了NVIDIA CUDA编程模型。可以看到从global memory到shared memory的数据移动(矩阵到thread block tile);从shared memory到寄存器的数据移动(thread block tile到warp tile);从寄存器到CUDA core的计算(warp tile到thread tile)。
cuBLAS 实现了单精度矩阵乘的函数cublasSgemm,其主要参数如下:
cublasStatus_t cublasSgemm( cublasHandle_t handle, // 调用 cuBLAS 库时的句柄
cublasOperation_t transa, // A 矩阵是否需要转置
cublasOperation_t transb, // B 矩阵是否需要转置
int m, // A 的行数
int n, // B 的列数
int k, // A 的列数
const float *alpha, // 系数 α, host or device pointer
const float *A, // 矩阵 A 的指针,device pointer
int lda, // 矩阵 A 的主维,if A 转置, lda = max(1, k), else max(1, m)
const float *B, // 矩阵 B 的指针, device pointer
int ldb, // 矩阵 B 的主维,if B 转置, ldb = max(1, n), else max(1, k)
const float *beta, // 系数 β, host or device pointer
float *C, // 矩阵 C 的指针,device pointer
int ldc // 矩阵 C 的主维,ldc >= max(1, m) );调用方式如下:
cublasHandle_t cublas_handle;
cublasCreate(&cublas_handle);
float cublas_alpha = 1.0;
float cublas_beta = 0;
cublasSgemm(cublas_handle, CUBLAS_OP_N, CUBLAS_OP_N, N, M, K, &cublas_alpha, d_b, N, d_a, K, &cublas_beta, d_c, N);性能如下所示,达到了理论峰值的 82.4%。
M N K = 128 128 1024, Time = 0.00002704 0.00003634 0.00010822 s, AVG Performance = 860.0286 Gflops
M N K = 192 192 1024, Time = 0.00003155 0.00003773 0.00007267 s, AVG Performance = 1863.6689 Gflops
M N K = 256 256 1024, Time = 0.00003917 0.00004524 0.00007747 s, AVG Performance = 2762.9438 Gflops
M N K = 384 384 1024, Time = 0.00005318 0.00005978 0.00009120 s, AVG Performance = 4705.0655 Gflops
M N K = 512 512 1024, Time = 0.00008326 0.00010280 0.00013840 s, AVG Performance = 4863.9646 Gflops
M N K = 768 768 1024, Time = 0.00014278 0.00014867 0.00018816 s, AVG Performance = 7567.1560 Gflops
M N K = 1024 1024 1024, Time = 0.00023485 0.00024460 0.00028150 s, AVG Performance = 8176.5614 Gflops
M N K = 1536 1536 1024, Time = 0.00046474 0.00047607 0.00051181 s, AVG Performance = 9452.3201 Gflops
M N K = 2048 2048 1024, Time = 0.00077930 0.00087862 0.00092307 s, AVG Performance = 9105.2126 Gflops
M N K = 3072 3072 1024, Time = 0.00167904 0.00168434 0.00171114 s, AVG Performance = 10686.6837 Gflops
M N K = 4096 4096 1024, Time = 0.00289619 0.00291068 0.00295904 s, AVG Performance = 10994.0128 Gflops
M N K = 6144 6144 1024, Time = 0.00591766 0.00594586 0.00596915 s, AVG Performance = 12109.2611 Gflops
M N K = 8192 8192 1024, Time = 0.01002384 0.01017465 0.01028435 s, AVG Performance = 12580.2896 Gflops
M N K = 12288 12288 1024, Time = 0.02231159 0.02233805 0.02245619 s, AVG Performance = 12892.7969 Gflops
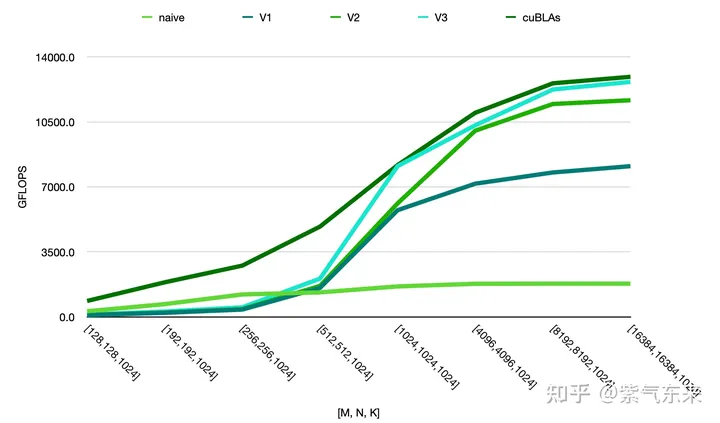
M N K = 16384 16384 1024, Time = 0.03954650 0.03959291 0.03967242 s, AVG Performance = 12931.6086 Gflops由此可以对比以上各种方法的性能情况,可见手动实现的性能已接近于官方的性能,如下:
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

② 国内首个自动驾驶学习社区
国内最大最专业,近2700人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦2D/3D目标检测、语义分割、车道线检测、目标跟踪、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、在线地图、点云处理、端到端自动驾驶、SLAM与高精地图、深度估计、轨迹预测、NeRF、Gaussian Splatting、规划控制、模型部署落地、cuda加速、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)

④【自动驾驶之心】平台矩阵,欢迎联系我们!


















 2293
2293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









