






今天和大家推荐【自动驾驶之心知识星球】,国内首个也是最大的自动驾驶全栈技术交流社区,目前近3000人,汇集了行业几乎所有主流自动驾驶与AI类公司大佬。无论是技术交流抑或是求职都能轻松应对,解决工程和职场上的问题。
| 国内最大最专业的技术交流社区 | 近30+自动驾驶技术栈学习路线 |
|---|---|
| 最实时的技术分享平台,精确到24小时 | 国内最全的自动驾驶视频学习平台 |
| 自研自动驾驶面试一百问 | 近100+自动驾驶公司,200+高校成员 |
| 当天完成所有问题的回答 | 50+自动驾驶算法开发专家解答 |
| 最新职位内推,简历直达 | 工作/求职互助,相互吐槽 |
如果您是:需要提升工作能力,希望和更多同领域的大佬交流;刚入门自动驾驶的小白,不知道怎么展开学习;正在春招/秋招/实习/跳槽准备的同学;其它行业转入到自动驾驶领域的同学;中层技术管理人员/产品经理等。欢迎加入自动驾驶之心知识星球,极低的成本获取极大的成长~
五一巨额优惠券!微信扫码加入

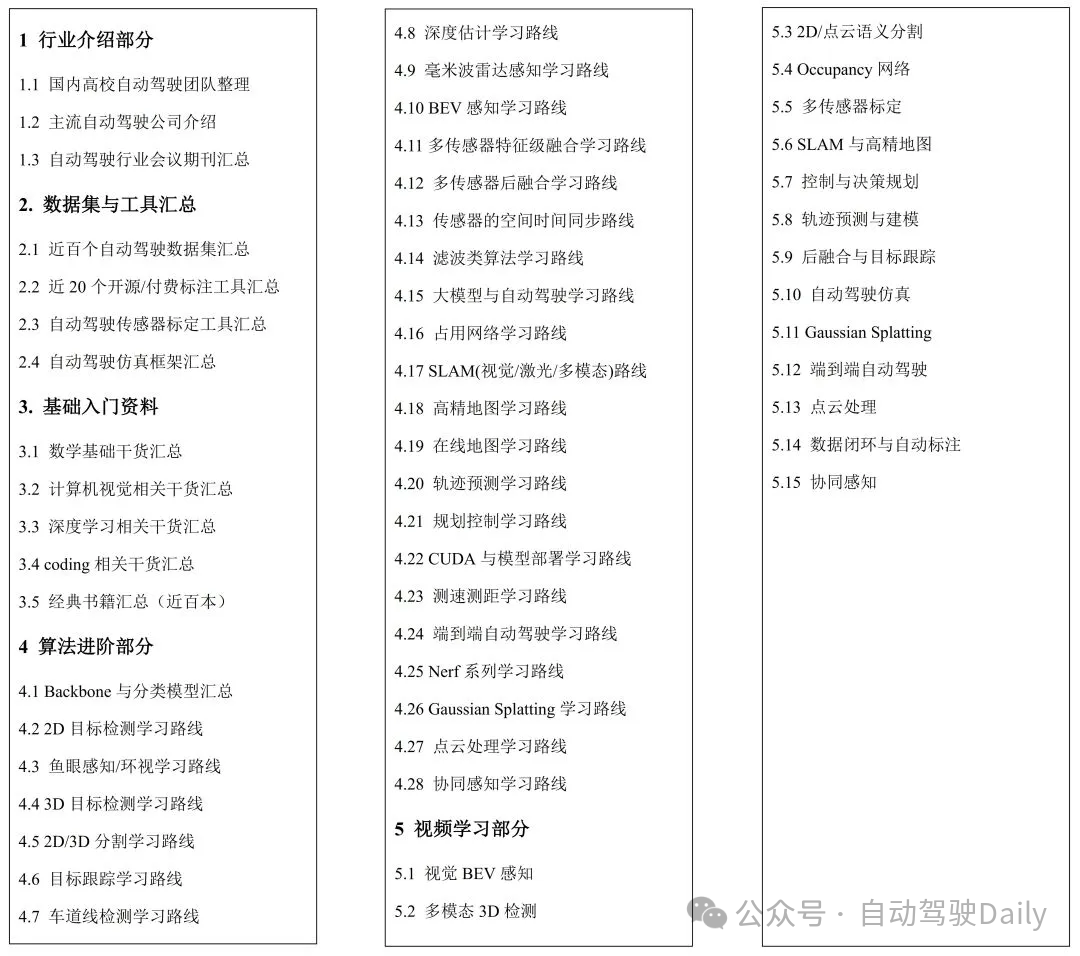
(一)星球主线一览
(二)第一时间获取最新技术
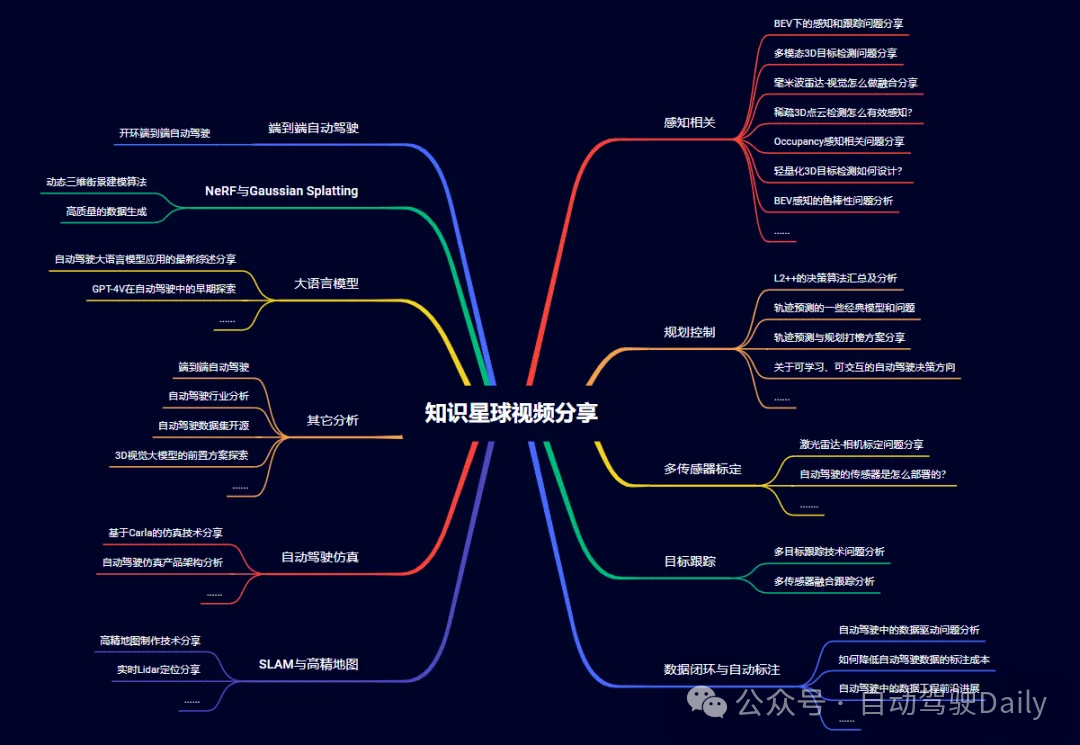
星球做到了全球技术的24小时更新,第一时间将论文分享到内部!除此之外,星球内部会不定期邀请CVPR、ICCV、ECCV、NIPS、TPAMI等各类顶会顶刊作者以及国内外各大顶尖自动驾驶公司团队前来直播分享,就死磕两件事,如何量产和research研究方向,非常适合工业界和学术界的小伙伴!目前星球内已经积累了大量的视频和论文干货,涉及近50个子方向!
(三)丰富的问题讨论
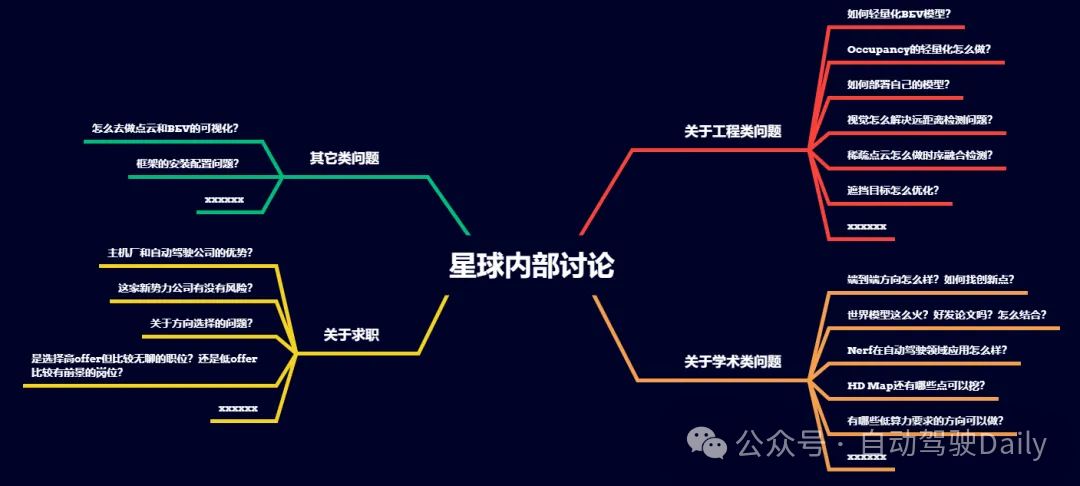
每天多类问题,近50+算法开发专家当天完成解答,涉及感知、定位、融合、标定、规控等近30个方向!你遇到的坑其他人大概率都遇到过......
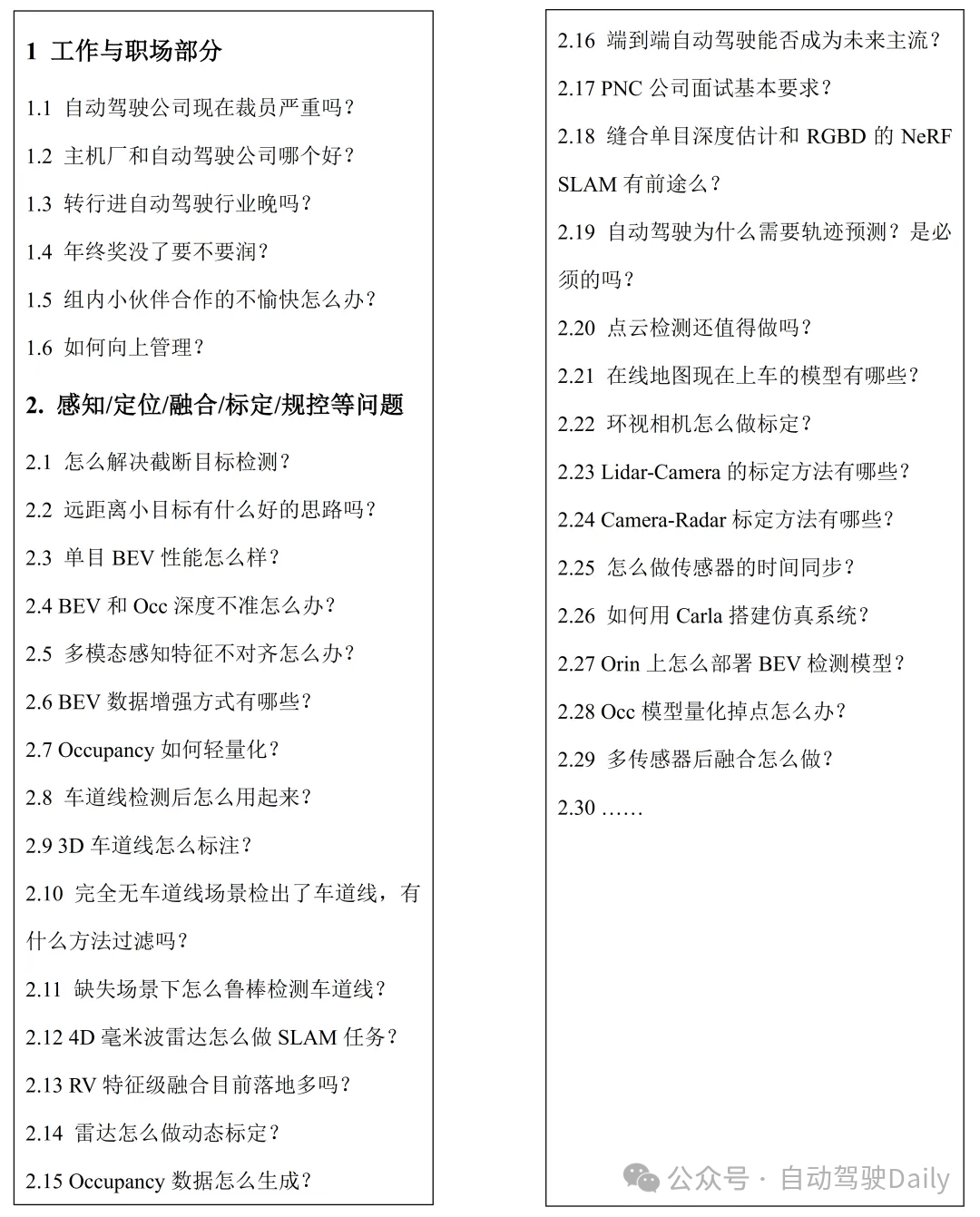
(四)自研自动驾驶一百问
为了让大家更方便求职和进阶学习,自动驾驶之心针对模型部署、TensorRT、Cuda加速、BEV感知、毫米波视觉融合、车道线检测、多传感器标定、相机标定、规划控制、Occupancy、Nerf、轨迹预测、4D毫米波雷达等众多方向自研了一系列一百问问答,几乎涵盖了所有自动驾驶公司的面试题目,助力大家面试求职!内容一览:
1)TensorRT部署与Cuda加速
CUDA核函数嵌套核函数的用法多吗?
jetson系列,一般都是共享内存,是不是不需要使用cudaMemcpy这个函数了? 要使用其他的memcpy方式吗?
8704个cuda core是怎么算的?int32 Fp32 fp64加起来每个SM 160个cuda core?
图像数据在GPU显存中的排列顺序是chw还是hwc?
神经网络中吞吐和延迟的关系?
onnx模型推理结果正确,但tensorRT量化后的推理结果不正确,大概原因有哪些?
采用tensorRT PTQ量化时,若用不同batchsize校正出来模型精度不一致,这个现象是否正常?
如何使用nsight或CUDA runtime api分析模型推理性能?
如果QAT可以使模型尽可能减少量化带来的误差,那么可以不做敏感层分析,直接将整个网络量化为INT8吗?
TensorRT如何设置混合精度推理 在int8模式下如何单独设置某一层的精度?
.......
2)BEV感知相关
BEV中的2d转3d原理是什么?
BEVfusion的算法把3D lidar的数据用view transformer变成了2D的,是不是会更省算力?那Lidar的距离信息会丢失嘛?
LSS的lift环节,将深度分布特征和图像特征做外积之后,得到的结果为什么叫做视椎特征?
bevformer中怎么建模高度信息的?
bevdepth论文中将离散深度分布替换为软硬随机数并没有崩,这是什么原因呢?
Bevdet4D中有个grid_sample warp 这个怎么理解?
image的数据增强,例如翻转等操作,如果投影到BEV空间点不变的话,和image数据增强前一样,这样的训练是不是有问题啊?
Bevdet4d中运动的物体不对齐不会对检测结果产生影响吗?
BEV可视化怎么实现?有没有代码参考?
我想问下bevfusion仅图像流训练的话,一般要迭代多少个epoch收敛?
轻量化的bev算法有哪些呢?部署落地的那种?
......
3)规划控制相关
端到端自动驾驶能否成为未来主流,或者说端到端方法有什么优点,期望解决什么问题?
如果不预测的话,在城市工况下,假设有行人横穿,而且走走停停,这种case的避障 势力场能够避障吗?
如何从EM planner 中找idea?
时空联合规划用的多吗?时空联合规划分别在笛卡尔坐标系和Frenet坐标系的优劣?
path-speed的解耦方式的论文推荐?
现在企业里的控制都是用什么做呢?
......
4)Occupancy相关
3D语义分割和Occupancy两种评价方式的区别?真值的区别,以点来评价还是以体素来评价?
请问将bevfusion的3d检测头替换为占用和语义头可行吗?
能不能把3d occ的算法几何头和语义头分开训练呢?
单目和环视的occ除了输入不同以外方法上有什么区别吗?
请问一下,怎么把surroundocc的可视化调大一点?
Occ的优化是从哪些方面做的?
想请教一下有没有用3d occ和激光雷达点云做融合的方案?
关于占用网络,有没有类似nuScenes Tasks那样的Leaderboard?
occupancy 数据集只能通过segmentation 结果生成吗?在工程上,怎么让标注人员标注呢?
想问下目前主机厂对于Occupancy Prediction持什么态度,目前的进展是什么?
......
5)毫米波雷达相关
现在有公开的4D毫米波雷达点云数据集吗?想验证一些点云处理算法
4D毫米波雷达和相机融合的检测方案有什么推荐吗?
有关于毫米波雷达测距在工业领域的实际落地应用或者是工业复杂环境中的导航的研究吗?
请问毫米波雷达目前有哪些主流的过滤方法?
最近老板叫我做一下毫米波雷达的点云的聚类,我想问一下有什么合适的数据集?
有关于纯毫米波雷达的目标检测的论文,数据集之类的?
有哪些毫米波雷达测距测速的资料?
磁场对毫米波雷达信号有何影响?例如在毫米波雷达附近有一块磁铁,对毫米波的TX/RX有何影响?
如果是雷达做动态标定,如果想去找路上的护栏,要怎么找这个护栏?
......
6)车道线检测
3D车道线,标注的话应该怎么标呢?
图像中有一条车道线看得清楚,有一条车道线被挡住了,那么被遮挡的这条车道线需要标注吗?
评估两个车道线匹配程度,用DTW算法可以吗?
PETR预测车道线是预先设置了anchor还是用anchor直接去预测?
如果一根车道线被检测成两根车道线(并排两根或者前后两段),有什么后处理方法?
完全无车道线场景检出了车道线,有什么方法过滤吗?
为什么行业用Lidar做车道线检测的方案较少?
......
7)轨迹预测
路径规划一般考虑低速和静态障碍物 轨迹预测结合的作用是??关键snapshot?
目前头部公司,一般预测是属于感知大模块还是规控大模块?
如果PNC只拿top1的预测轨迹,那是不是会出现因为轨迹的概率值抖动,导致的top1预测轨迹抖动?
请教大家一个问题,argoverse的这种车道中线地图,在路口里面没有车道线的地方是怎么得到的呀?
有个问题请教下,现在轨迹预测基本都依赖地图,如果换一个新的地图环境,原模型是否就不适用了,要重新训练吗?
......
8)NeRF
目前NeRF在业界应用比较多的是什么领域呢?未来能应用在什么领域呢,除了自动驾驶?
对于新学NeRF的小白,需要补哪些基础内容啊,有没有推荐啊?
NeRF还存在哪些问题需要研究?
为什么3dgs渲染颜色感觉过曝了?
mobile nerf在建模无边界场景的时候有没有warp?如果有,它是怎么warp的?
像UniSim和NeuRas这种,有没有类似效果的复现呢?
......
9)多传感器标定
如果要同时标定lidar,camera和毫米波雷达的话,有什么样式的标定板/角锥推荐吗?
请问标定间的三维重建用什么设备,测绘级激光雷达吗?
相机标定结果的鲁棒性通过哪些指标可以进行评价好坏?如何提高相机标定结果的鲁棒性?
双目在线标定怎么做,有什么方案吗?
深度学习标内参有相关的学习资料或者paper介绍吗?
标定lidar imu为什么一定要走八字啊,绕圆等其他方法不行吗?
有多个相机和多个激光雷达,产线中使用标定板一般怎么进行标定啊?
请问相机和雷达到车身的相对位姿一般用什么方法标定呢?
单线激光雷达有什么好的标定方法?联合标定,和相机还是雷达?
......
10)其它
更多详细内容及问答答案,欢迎加入自动驾驶之心知识星球获取,国内第一个自动驾驶一百问路线。
(五)写在最后
保持跟进和输入的最佳方法是什么?我的答案是找对圈子,让你每天能够主动和被动接受很多新的知识,包括领域知识体系的梳理、刷题、面试经验、各家企业现状、各个岗位的具体职责以及后续的职业前景等。一个人入门学习,无异于大海捞针,浪费了大把时间踩坑,还得不到想要的答案。欢迎加入我们一直在维护的社区:自动驾驶之心知识星球,目前是国内最大、最专业的自动驾驶社区。
五一巨额优惠券!微信扫码加入















 93
93











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









