






从local map(局部地图)到SD地图(标准地图);从SLAM的方法构建高清地图,到2D和3D高清地图生成技术的讨论;从二维语义地图到用于自动驾驶感知任务超绝优势的矢量地图;从各大厂和研究团队都在布局的轻高精地图和无图(无图高精地图),到离线构建到在线高清地图方法一鸣惊人;再到今天我们要讲的MapTracker,掌握前沿学术科研动态才能快速精准找到你研究方向下的创新点!
研梦非凡邀请大模型高效计算资深专家杨导师,研发《Wayve超牛工作:在线跟踪方式实现在线高清地图新SOTA》直播课,从研究背景、相关工作、创新点发现验证、使用方法、实验结果详解等方面,为大家全方位拆解MapTracker工作!
扫码预约直播课,领配套学习资料

100篇左右配套学习资料论文包含:local map、SD地图、SLAM高清地图、点云融合、矢量地图、在线高清地图等。
MapTracker课程大纲
一、论文学习重点
该文提出了一种矢量高清映射算法
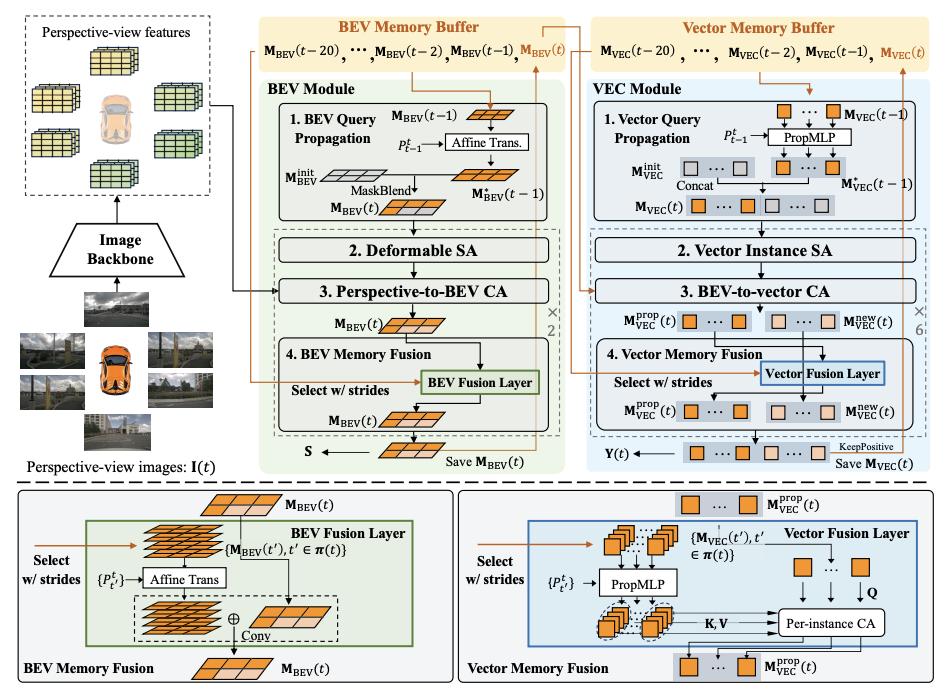
MapTracker将传感器流累积到两个潜在表示的内存缓冲区中
鸟瞰图 (BEV)中的栅格潜在变量
道路元素上的 Vector latent
从显式关联被跟踪道路的跟踪算法中借用查询传播范例元素从上一帧移动到当前帧
基准贡献
二、研究背景
矢量高清映射
现有Vector HD映射
MapTracker
为两个latent表示保留内存缓冲区
三、相关工作
使用Transformer进行视觉对象跟踪
TrackFormer
TransTrack
MOTR
MeMOT
MeMOTR
自动驾驶中的内存设计
BEVDet4D
BEVFormerv2
VideoBEV
SparseDv2
SparseDv3
Vector HD-Mapping
HDMapNet
VectorMapNet
MapTR
扫码预约直播课,领配套学习资料

100篇左右配套学习资料论文包含:local map、SD地图、SLAM高清地图、点云融合、矢量地图、在线高清地图等。
四、方法研究
MapTracker
Memory Buffers
BEV Module
VEC Module
Training
Mapping Benchmark
五、实验详解
Settings
Datasets
Metrics
Main Results
Ablation Study
Qualitative Comparisons
六、总结及可提升点
扫码预约直播课,领配套学习资料

100篇左右配套学习资料论文包含:local map、SD地图、SLAM高清地图、点云融合、矢量地图、在线高清地图等。
ps:研梦非凡开设的前沿论文系列直播,旨在帮助大家提升读论文技能,快速抓住重点,掌握有效方法,进而找到创新点,轻松完成论文工作。(文末更多福利!)
研梦非凡科研论文指导服务
如何快速找到idea,如何正确的选择模型,怎么避免与其他工作重复, 什么样的实验计划省时效果显著,一边实验一边出论文初稿技能,针对不同的期刊会议绘图方法,终稿完善,投稿策略,期刊/会议选择,response,直到accpet!研梦非凡全程陪伴你产出科研成果!
<<< 左右滑动见更多 >>>
如果你需要发CCF A会-C会、SCI一区-四区、EI会议/EI期刊、毕业大论文、毕业设计等,都可以来研梦非凡匹配合适的论文指导服务。
下面是我们根据自动驾驶之心粉丝需求,整理的自动驾驶现有idea!
研梦非凡导师团队
研梦非凡的导师来自海外QStop50、国内华五、C9、985高校的教授/博士导师/博士后,世界500强公司算法工程师,以及国内外知名人工智能实验室研究员。
这是一支实力强大的高学历导师团队,在计算机科学、机器学习、深度学习等领域,积累了丰富的科研经历,研究成果也发表在国际各大顶级会议和期刊上,在指导学员的过程中,全程秉持初心,坚持手把手个性化带教。包括但不限于以下导师~~
<<< 左右滑动见更多 >>>
扫码加助教为你匹配合适课题的大牛导师

我们不是小作坊哦~我们背靠研途考研(就是张雪峰老师和徐涛老师在的那个研途考研),做教育十余年,重交付,重口碑,是我们一贯的公司理念!

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









