






点击下方卡片,关注“自动驾驶之心”公众号
端到端趋势下的规控控制
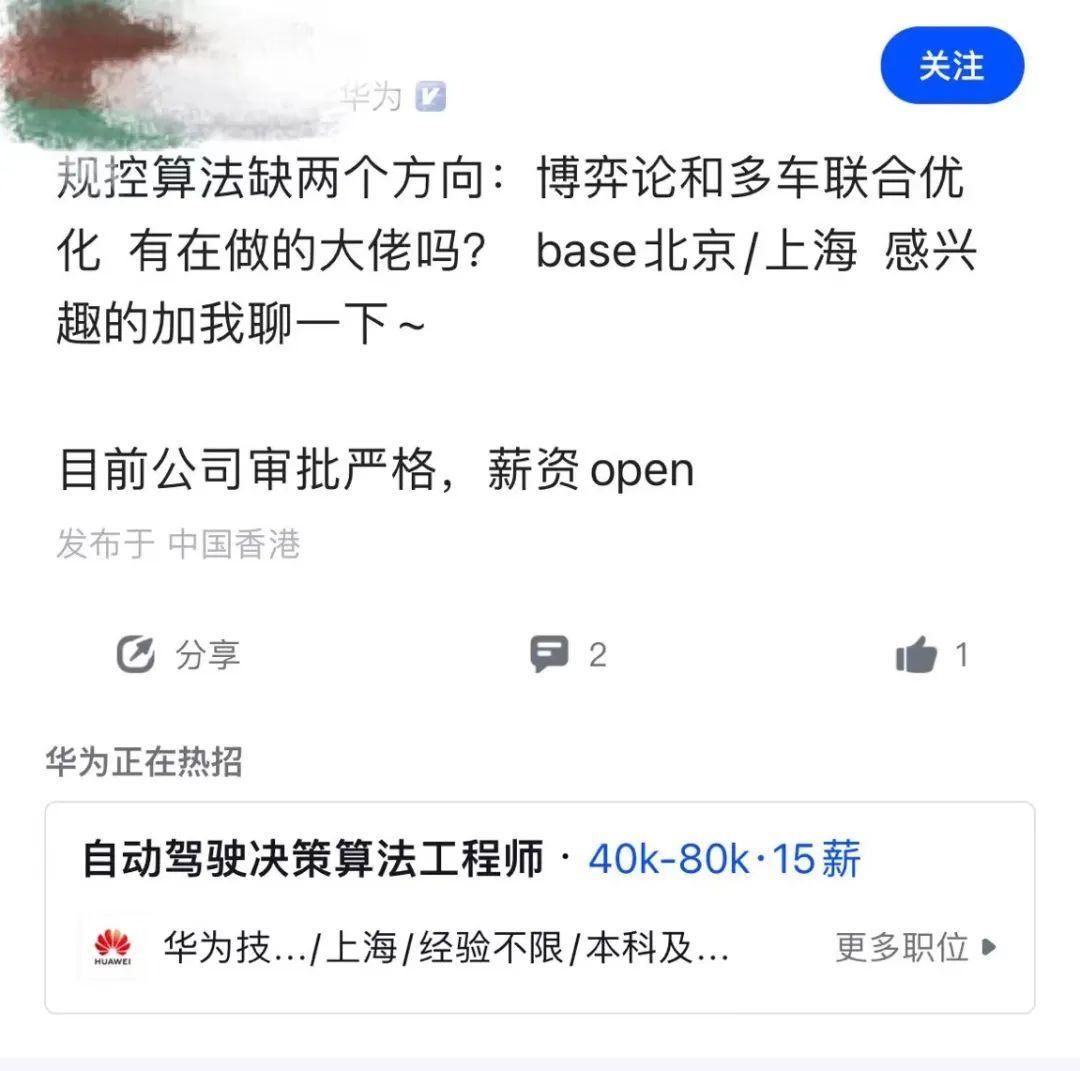
最近一年,端到端自动驾驶技术以摧枯拉朽之势席卷整个自驾行业,其场景泛化能力与数据驱动特性确实令人振奋。但当我们深入拆解Waymo、Tesla等国内外头部企业的落地架构时发现:只靠端到端没有办法完全收敛量产问题,业内各家公司依旧用传统的基于数学的方法来给安全兜底、极端场景处理中扮演着不可替代的角色。很多小伙伴都在迷茫中探索,下面这位同学的提问非常具有代表性:
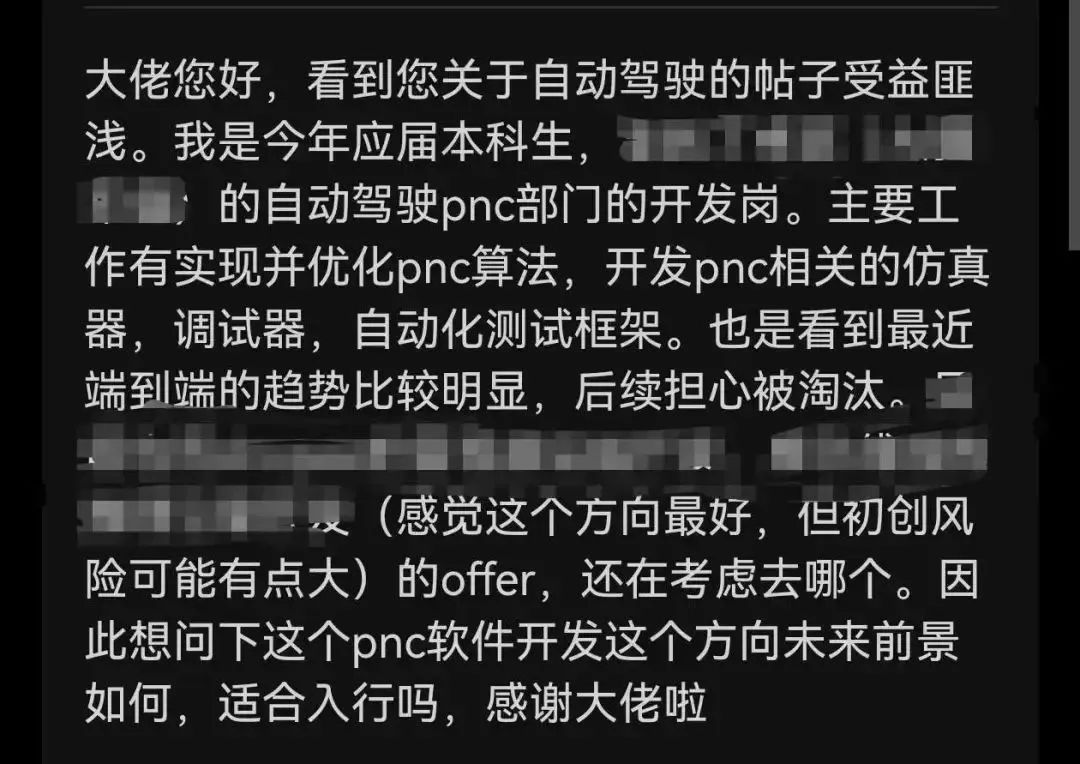
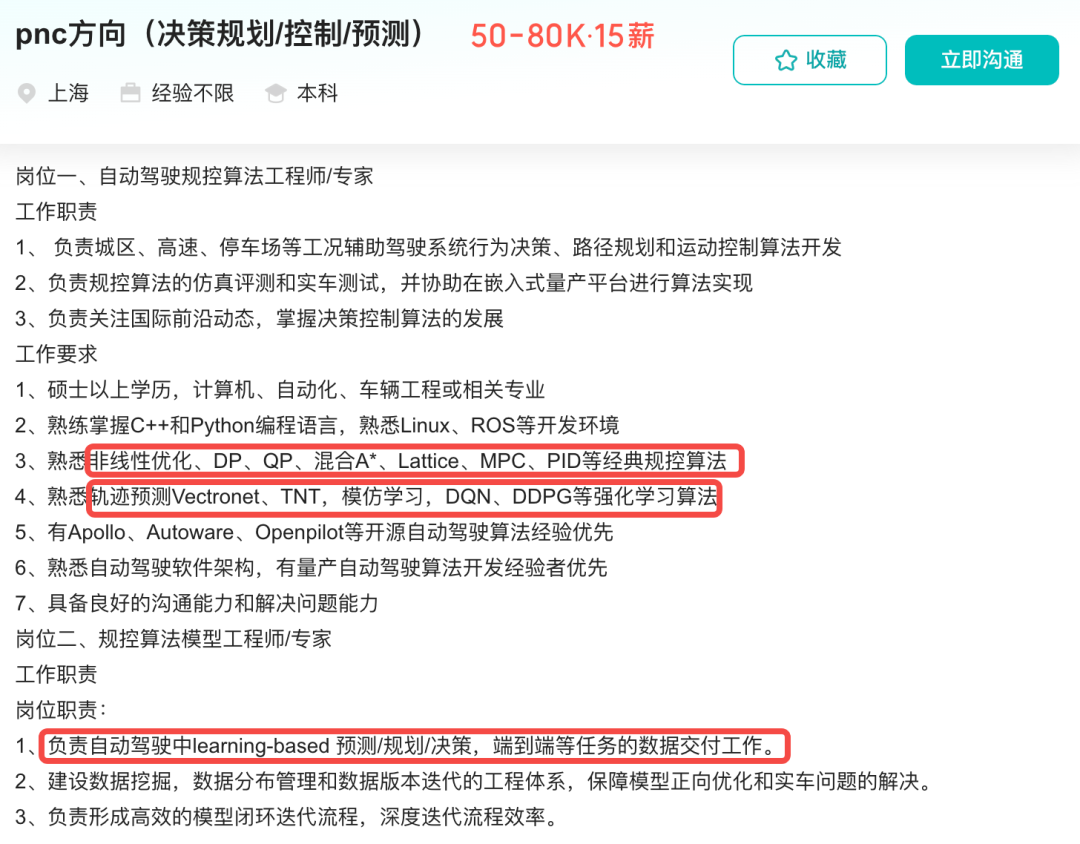
进入2025年,端到端进一步铺开落地,新一代基于VLM的端到端系统也在大力突破。回到最开始的问题,传统PnC的地位反而更稳固了,国内端到端算法仍然需要传统规控兜底!尤其是对安全性要求更高的L4,传统规控仍然占据主导地位!因此在当前趋势下,传统规控有哪些经典和创新的落地方案?一段式、两端式端到端以及最新VLM/VLA的核心思想是什么?实际落地中传统规控和端到端框架又是如何融合的?是当下从业小伙伴实际需要思考的问题。相关岗位更是高达80K月薪!
为什么要做小班课程?
前面自动驾驶之心已经推出了《规划控制理论&实战课程》、《自动驾驶规划控制小班课(第一期)》和《自动驾驶规划控制小班课(第二期)》备受好评!

课程只有一个目的:
❝
实际工作用什么,我们就教什么!实际量产遇到什么痛点,我们就解决什么问题!实际面试什么是亮点,我们就分享什么!
把业内目前使用的经典方案以及热门的端到端方案,以及在实际落地中两者是如何融合的,都讲明白,做到一门课了解业内最前沿的落地思路!
更重要的是,本课程重点的两个工程项目,可以直接写入简历!直接写入简历!!直接写入简历!!!如果你没有相关实习经验,或者简历上没有特别亮点的项目,一定不要错过秋招前最后的上车机会。
我们也开放了试听,欢迎大家微信扫码学习,看看是否真的适合自己。
这门课能有什么收获?
不同于前面的规划控制类的大班课程,第三期招收学员不超过50人。主打一个保姆级陪伴与教学,真的能够解决大家实际工作中问题,关注大家的各类疑问,学完对标2年算法工程师经验。
不仅仅关注技术学习,我们后期还会花时间在辅导求职上,包括修改简历、模拟面试、推荐工作机会等,一步一步助力大家拿到offer。
直接面向就业的项目实战,丰富你的简历;
专业面试官直击面试痛点,打磨你的能力;
对规划控制领域有着更高层级的理解,从普通迈向高级;
学员完成学习之后,更有机会直接推荐简历至主流自动驾驶公司;
能够具备构建自己场景下决策规划系统的能力;
能够掌握真实自动驾驶场景中的算法改进,解决量产遇到实际系统性的问题;
提供本项目主要代码和运行环境;
学完能够达到2-3年规划控制算法工程师经验;
往期学员的去处
根据反馈,前两批近100名学员已经拿到了很多大厂的offer,成功上岸华为、百度、地平线、momenta、小米、极氪、蔚小理等等!宁老师还会一对一帮助大家做好简历修改和Offer选择,真正做到保姆级陪伴!

我们将会怎么做这门课?
我们准备在vip群内直播传授,并保留录播视频,后期加密提供给vip学员反复学习。六月月中旬正式开课!本课程适用于有一定实习/工作基础的同学,不是面向纯小白!如果对基础不是很了解的话,欢迎学习我们的《规划控制理论&实战课程》,为了回馈大家的支持,购买本就业课程,直接免费送给大家一套基础课程。

本课程会使用C++和Python两门语言作为主要开发工具,需要您具备一定的编程基础。所有代码将会开源,也希望大家可以在此基础上继续优化。
文字与线上会议答疑、模拟面试与复盘等服务(服务时长:开课后2.5~3个月);
不提供服务器,只提供容器环境;
授课完成后,根据需要组织1-3次线上答疑服务;
❝
注:对于有意向参与本次就业小班课的学员,需要学员准备一份个人简历,宁老师会根据简历判断学员是否符合课程招收标准。
规划控制小班课程大纲
小班课完整版大纲如下:
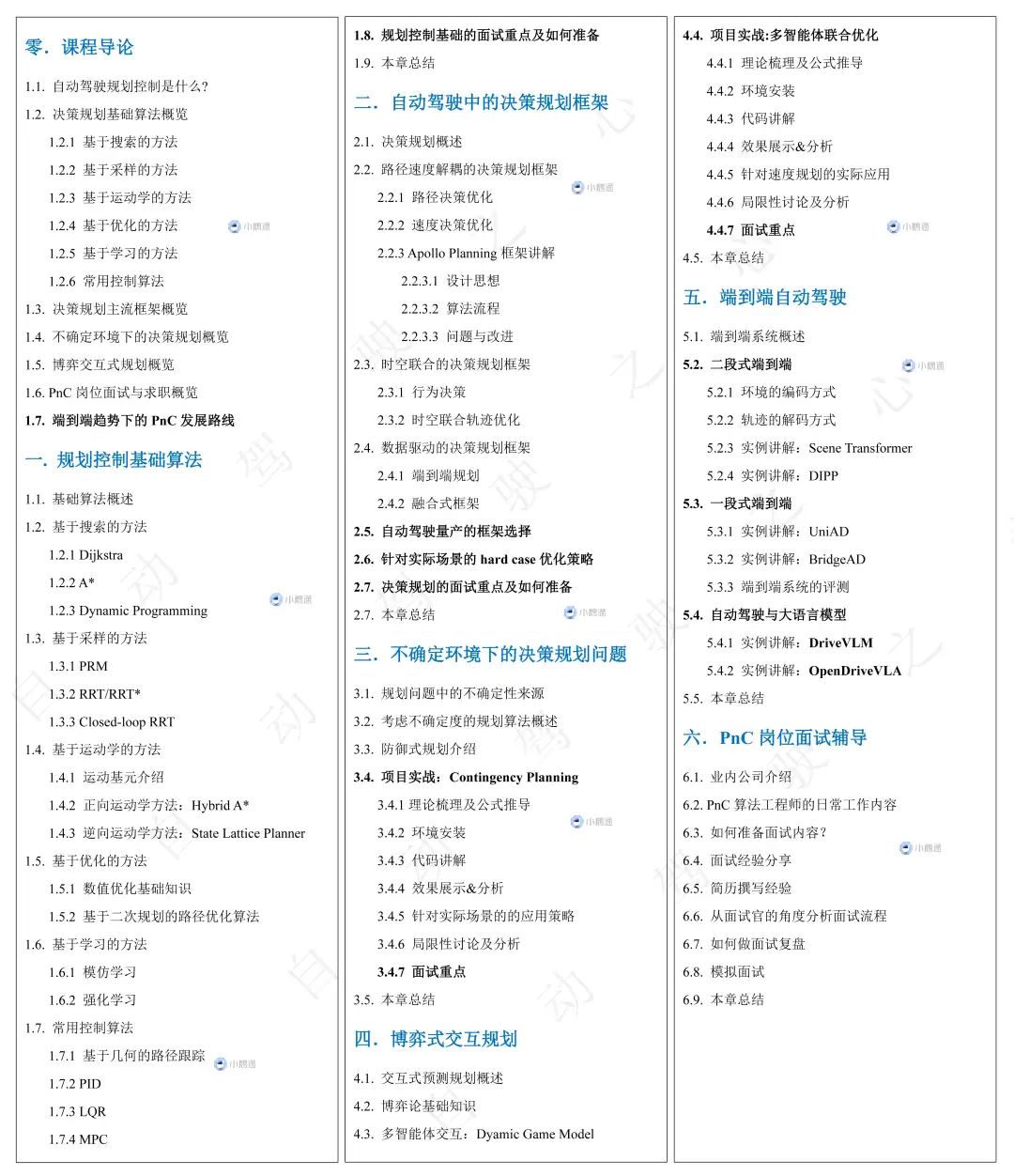
第一章:规划控制基础算法
第一章宁老师会带领大家全面复盘整个规控领域的基础算法。算法工程师的底层能力是对基础算法的理解和掌握,这是任意一家公司面试都会涉及的。基于搜索的、基于采样的、基于运动学的、基于优化的、基于深度学习的规划算法到底都是个啥?每类算法的优缺点是什么?在不同应用场景下应该选择什么算法?这一章宁老师会重点带着大家建立规划控制领域整体上的概念,抓大放小,搭建全局视野。内容主要包括:

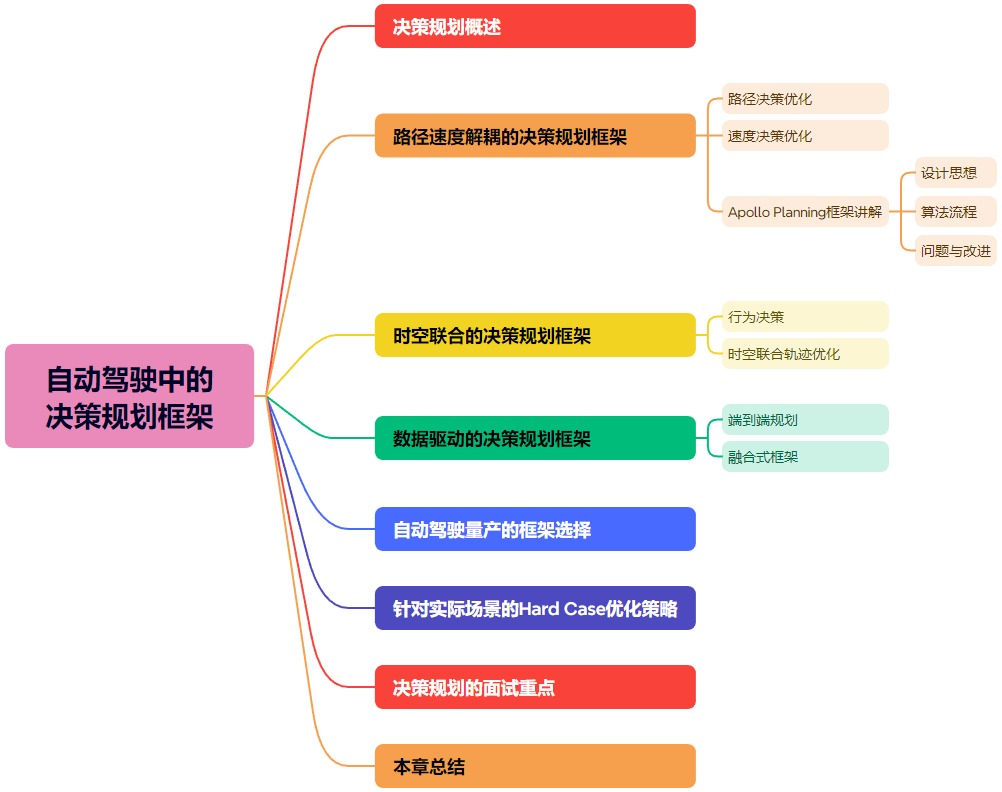
第二章:自动驾驶中的决策规划框架
第二章会利用第一章中介绍的基础算法作为工具带大家构建一个完整的决策规划框架,包括现在绝大多数公司实际量产使用的路径-速度解耦框架、理论上求解更优的时空联合框架、以及面向下一代自动驾驶量产的数据驱动框架。这一章学完后大家会对自动驾驶决策规划有一个整体的认识,清晰决策-规划的边界以及联系。具备优秀的全局视野,而这往往是工作三年以上的算法工程师逐渐摸索才能具备的能力!内容主要包括:
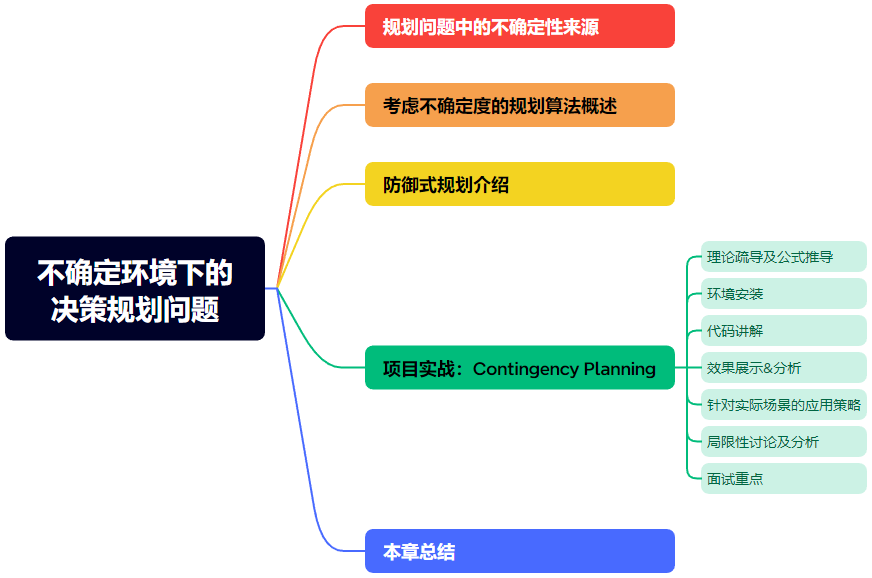
第三章:不确定环境下的决策规划问题
头部自动驾驶公司研究较多的方向,面试必问!决策规划本质上面临的是一个在不确定性环境中求解概率最优的问题,不确定性的来源有多方面:感知的不确定度、定位控制的不确定度、环境中其他社会车意图的不确定度等等。以其他社会车意图不确定度为例,若决策规划系统只考虑worst-case,可以保证安全性,但自车的行为会很保守,不符合人类开车习惯;反之,若系统直接忽略一些小概率事件,则会导致碰撞风险。这一章节会讲解针对此问题的系统性解决方案—防御式规划(Contingency Planning),构建一个考虑社会车意图概率的轨迹优化问题,从理论、到环境、到代码、到实际场景实践全方位掌握。更重要的是,这也是当下各大公司实际量产中重点发力的方向!学到就能用到,用到就能量产上车!内容主要包括:
第四章:博弈交互式规划
头部自动驾驶公司研究较多的方向,面试必问!传统的自动驾驶算法框架是定位=>感知=>预测=>决策规划=>控制的链路,Planning会接收预测模块对社会车未来行驶轨迹的预测结果进行决策规划,但预测是在规划的上游,没有办法给出考虑到当前帧自车决策结果的预测,因此理论更优的做法是实现自车和他车的联合预测规划,也就是通过一个模型同时计算出他车和自车的轨迹。这一章节会介绍一个基于博弈论的交互式规划方法,通过Dynamic Game Model的相关理论实现他车和自车的联合优化。同第三章一样,本章亦会从理论、到环境、到代码、到实际场景实践全方位掌握。内容主要包括:
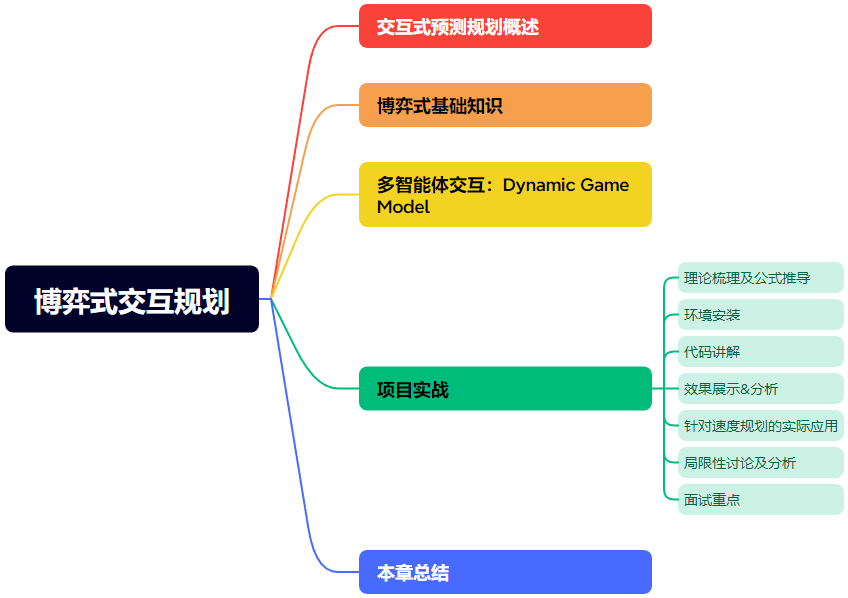
本章项目更是直接击中业内招聘痛点!
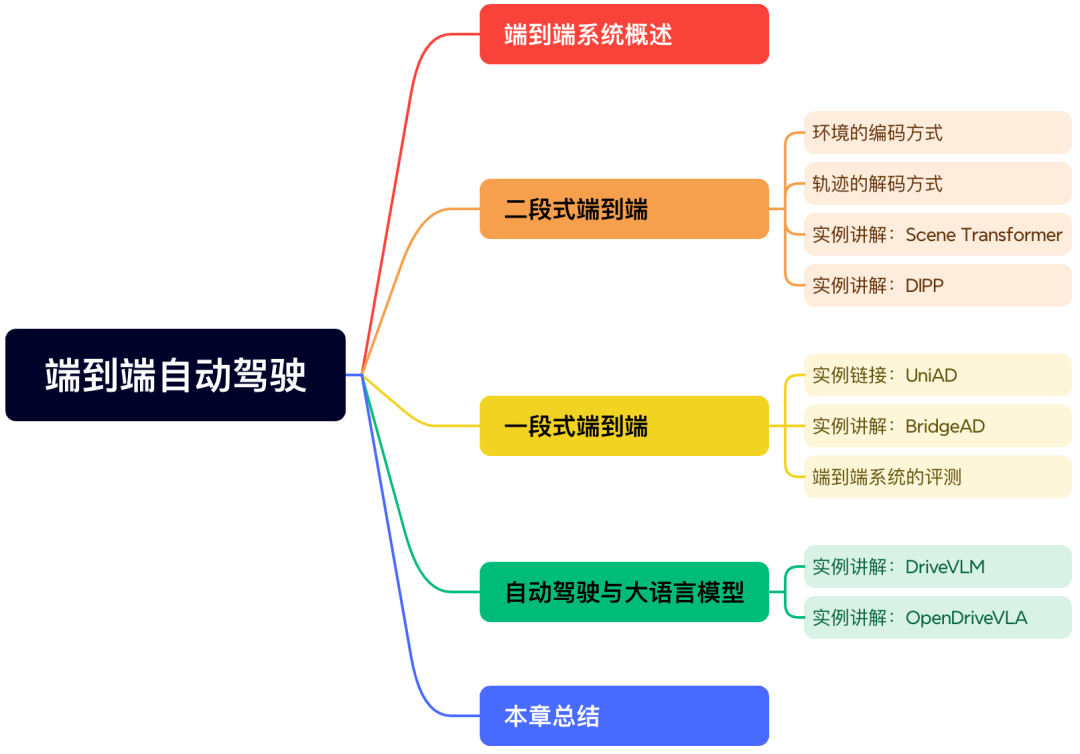
第五章:端到端自动驾驶
近两年端到端自动驾驶爆火以后,很多传统规控的小伙伴都在担忧会不会被端到端替代,后面该找什么样的出路。为了回答这个问题,本次小班课的第五章我们新增了端到端自动驾驶的章节。这一章节宁老师将会带领大家全面了解一段式端到端、二段式端到端以及当下最火的自动驾驶和大语言模型的结合VLM & VLA。从传统规控的角度分析这些工作有什么优势和局限性,以及在实际落地中如何最大化数据驱动的收益!内容主要包括:
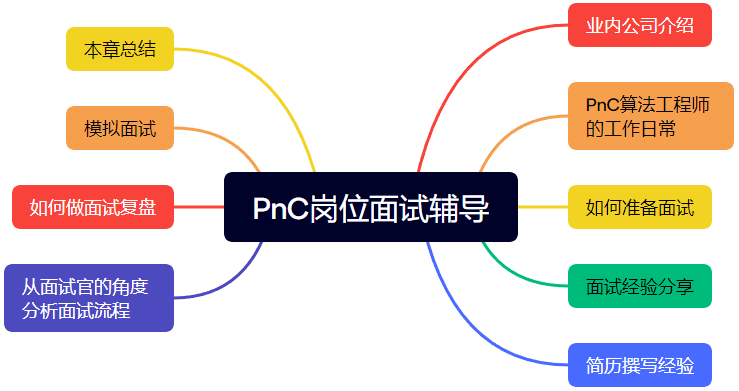
第六章:PnC岗位面试辅导
本次课程是直接面向秋招和实际工作的,自然离不开岗位面试的辅导。针对PnC岗位,业内公司都有哪些?简历如何突出亮点内容?该如何准备面试?面试过程如何引导面试官提问?需要规避哪些坑?有何有效总结和复盘面试?宁老师作为业内资深算法专家,在这个章节会结合自身作为面试者和面试官的经验,切实传授岗位面试的技巧。并且会有专门一场模拟面试带大家实操,形成技术到面试的闭环!此外针对每位报名学员,宁老师会提供专业的简历模板,并为每位学员提供一次免费的简历修改指导!内容主要包括:
附加服务
更进一步,我们为课程学员准备了价值一千元以上的附加福利:
简历修改(首次免费),价值500元;
赠送《规划控制理论&实战课程》或任一课程满减券,价值500元;
一对一付费咨询/模拟面试- 可推荐就业公司及城市。
讲师介绍
宁远老师,自动驾驶之心前沿技术研究团队成员,深耕自动驾驶算法领域多年,现任业内头部自动驾驶公司团队资深算法工程师,在自动驾驶规划控制算法研究和工程落地方面有着丰富的经验。
开发了国内第一门面向自动驾驶量产的规划控制与实战教程,学员超过300名,备受好评!
适合人群
车辆工程、自动化、汽车电子、计算机科学、软件工程、运动控制等相关专业研究方向的本科/硕士/博士;
自动驾驶规划与控制相关算法工程人员;
想要转入自动驾驶规控算法的小伙伴;
正在找工作的实习/校招/社招群体;
本课程需要具备的基础
学员最好具备以下基础:(基础薄弱也能参加,老师会将学习内容纳入指导范围,力求最快速度上手,但不对以下内容做详细指导):
具有一定的编程基础:C/C++或者Python;
一定的高等数学、线性代数和矩阵论基础;
掌握常见的规划控制基础算法及决策规划框架;
具有一定的实际工程经验;
注意事项
小班课重点关注工程应用能力和对自动驾驶决策规划系统的理解,力求学员具有实际项目面向求职市场需求。针对项目代码,会对代码模块和细节会展开介绍,但不会逐行详细讲解代码!
网上已有大量的开源项目和理论基础资料,宁远老师会选择合适的资料辅助讲解,为学员提供决策规划框架优化的细节,目标只有一个:让学员具备解决复杂问题的思路,掌握实际量产工作的能力!
学员在正式开课一周内仍可对导师的专业性/负责程度提出质疑,提供证据并申请全额退费。在这种情况下,自动驾驶之心核实后可全额退款!
开课时间
6.15正式开课,8-10节课,每节课2小时,线上答疑1-3次。
咨询课程
早鸟优惠!欢迎加入学习~

咨询小助理了解更多

版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!
投诉微信:AIDriver004(备注:盗版举报)

















 1801
1801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









