







“每一次的感应,都是对环境的温柔拥抱。”#STM32项目二 《感应开关盖垃圾桶》【下】
前言
本篇博文介绍的是基于STM32F103C8T6单片机第二个项目《感应开关盖垃圾桶》【下】,包含实现距离感应开盖,添加按键开盖功能,添加震动开盖,添加蜂鸣器项目完结。看到这篇博文的朋友,可以先赞再看吗?
预备知识
一、基本电路标识识别和接线,例如VCC,GND。
二、电脑基本操作复制粘贴
三、分文件编程
四、C变量
五、基本输入输出
六、流程控制
七、函数
八、指针
如果以上知识不清楚,请自行学习后再来浏览。如果我有没例出的,请在评论区写一下。谢谢啦!
1.实现距离感应开盖
1.1换另一个定时器进行PWM输出驱动SG90舵机
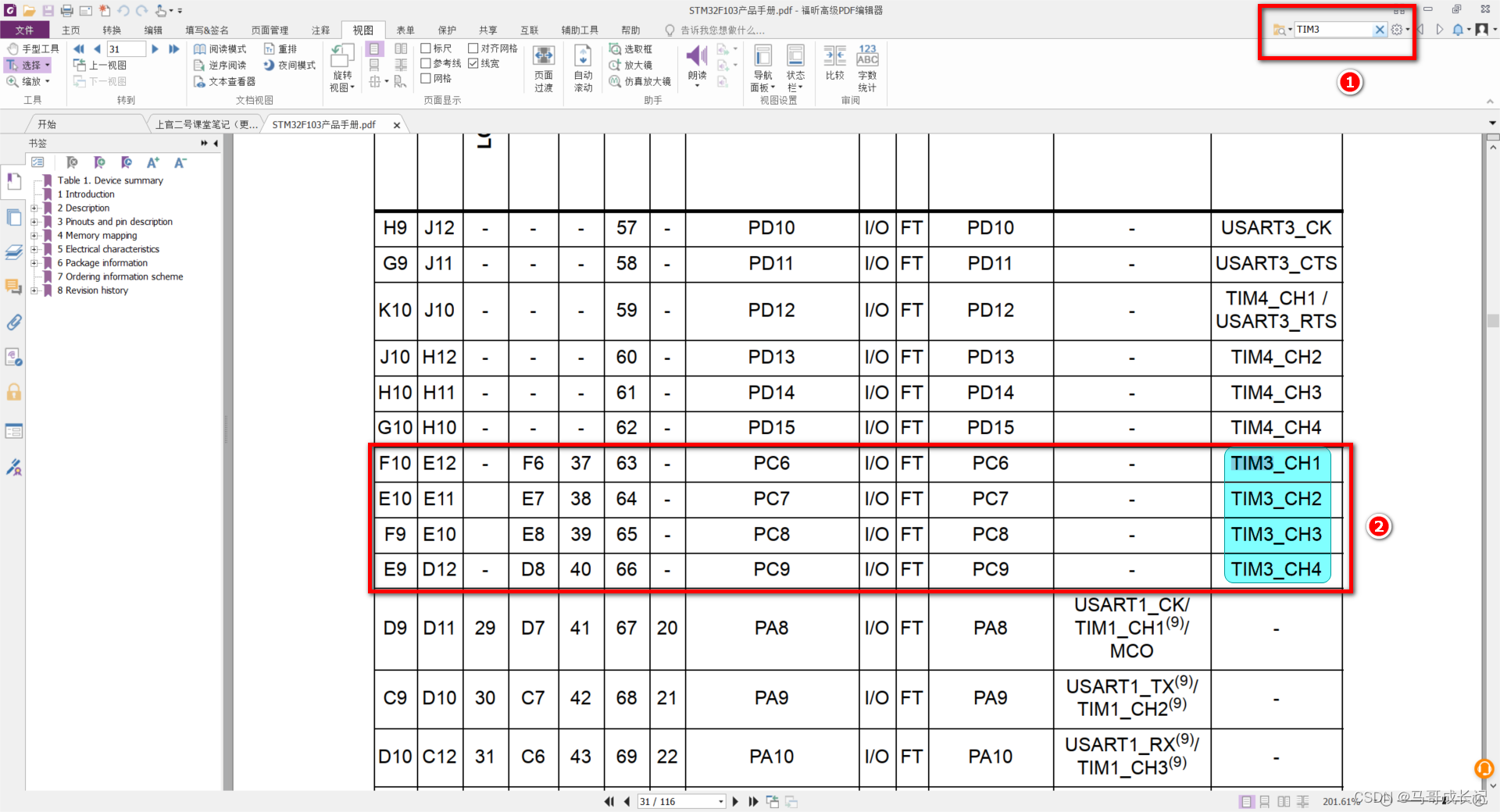
- 超声波测距已经用了定时器2,所以在产品手册中查找另外的定时器
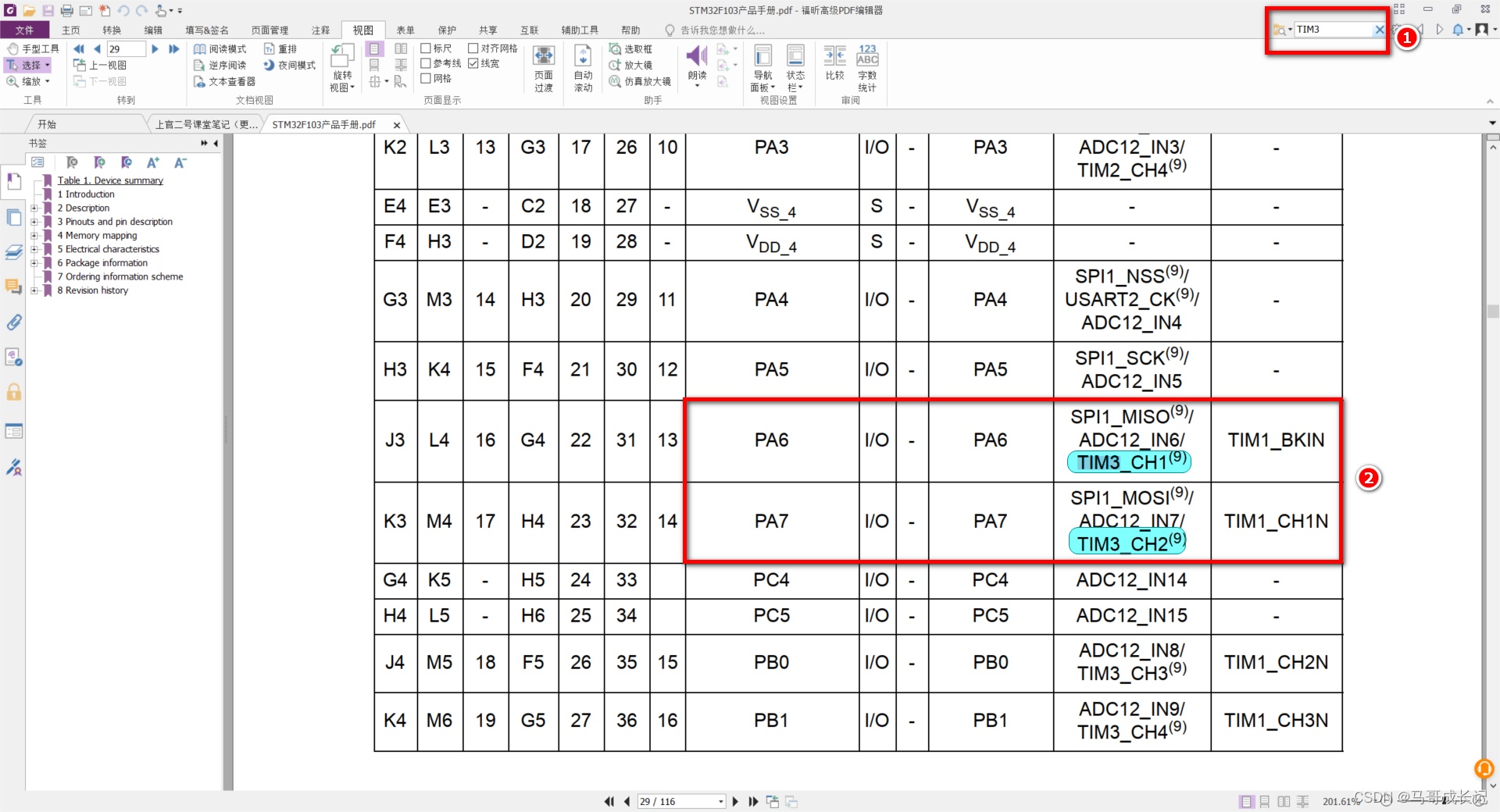
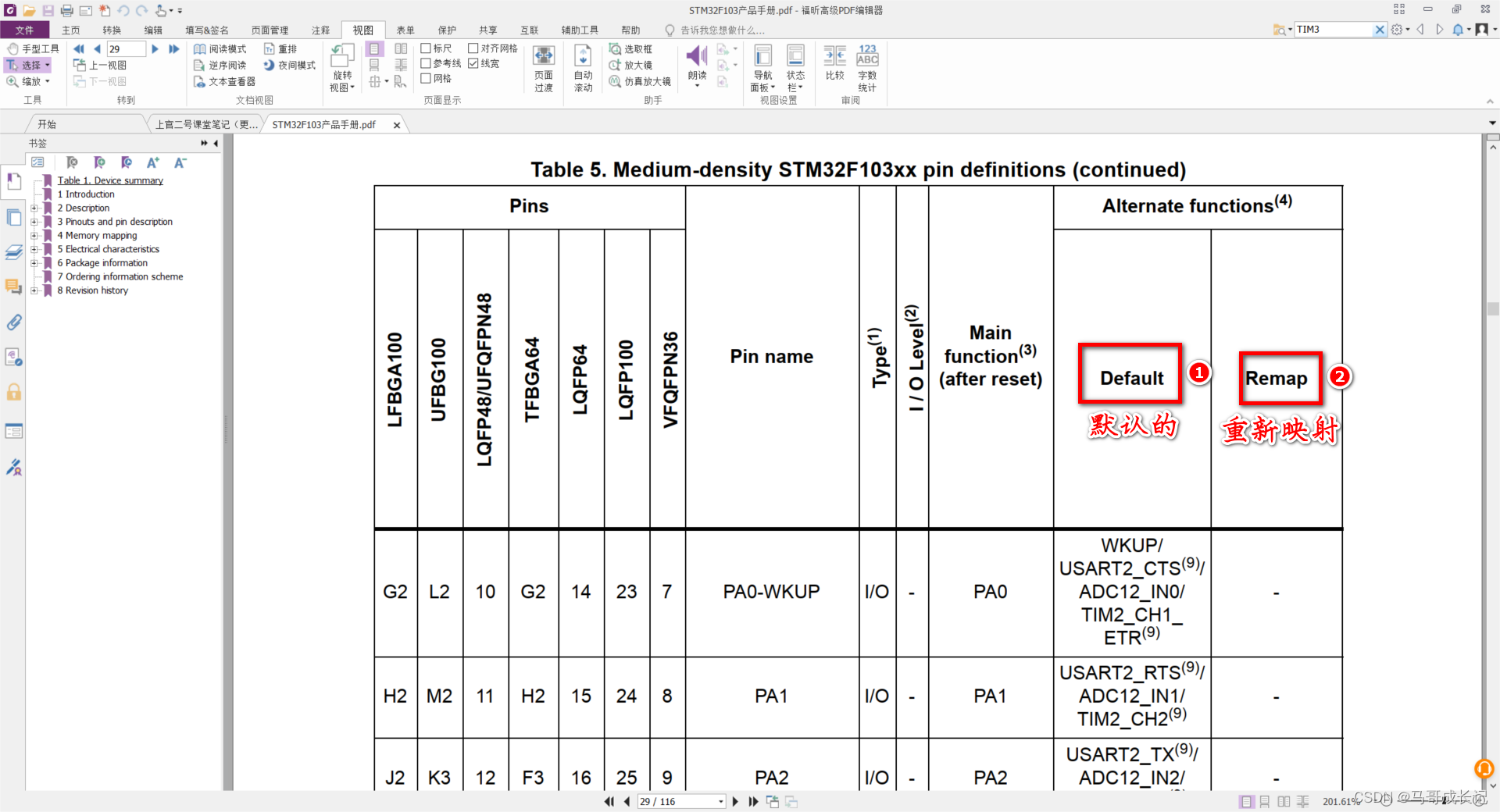

通过上面图片可知TIM3默然就有引脚支持,所以可以选用TIM3。然而在重新预设上还有对TIM3的定义,但在此单片机上没有该引脚的引出。
1.2延用超声波传感器介绍及实战工程进行配置PWM输出
- 配置TIM3,如下图步骤。

- 配置定时溢出值,使PWM波周期为20ms。如下图步骤。
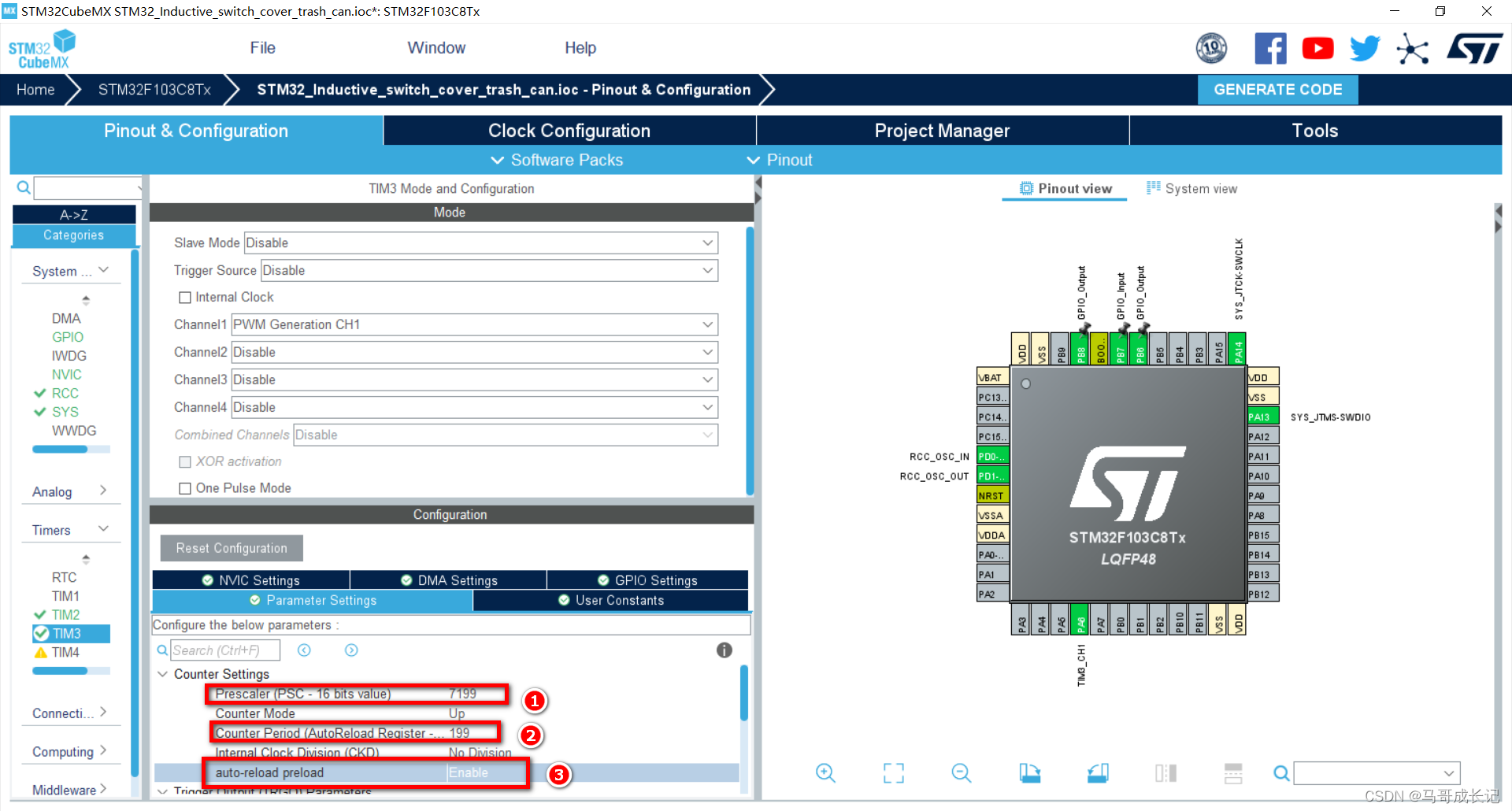
- 配置PWM参数,如下图步骤。

1.3在主C文件合适位置封装开关盖,开关LED1,初始化舵机角度函数
- 封装初始化舵机角度函数。
void initSG90_0()
{
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); //打开定时器3通道1 PWM输出
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,5); //转动到0度
}
- 封装开关LED1函数
void openLED1()
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
}
void closeLED1()
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
}
- 封装封装开关盖函数。
void openLid()
{
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,15); //转动到90度
HAL_Delay(2000); //打开盖子等待两秒
}
void closeLid()
{
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,5); //转动到0度
HAL_Delay(50); //每50毫秒测一次距离
}
1.4在主C文件主函数while循环内测距小于10cm开盖开灯,大于10cm关盖关灯
//获取距离
distance = get_distance();
//如果距离小于10厘米,LED1亮并开盖。反之LED1灭,关盖
if(distance <5)
{
openLED1();
openLid();
}
else
{
closeLED1();
closeLid();
}
2.添加按键开盖功能
2.1查看原理图,找到按键1所对应电路

由图可知,当按下按键时,PA0被拉低,所以设置中断为下降沿触发。
2.2基于实现距离感应开盖工程进行外部中断0的配置
- 配置GPIO的PA0外部中断0,如下图步骤

- 配置PA0为下降沿触发,如下图步骤

- 因为在中断函数内会使用延时函数,延时函数使用的中断优先级比此中断低,所以需要将此中断优先级降低。如下图步骤。

2.3在主C文件主函数合适位置提升延时函数的中断优先级
//提升延时函数中断优先级
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
2.4重写外部中断服务函数,实现按键开盖
//重写外部中断服务函数,实现按下KEY1开盖
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_0) //如果检测到是按下按键,就开盖
{
openLid();
}
}
3.添加震动开盖
3.1振动传感器接线
DO ——PB5
VCC——5V
3.2基于按键开盖功能工程进行配置外部中断5配置
- 配置PB5为外部中断5,如下图步骤。
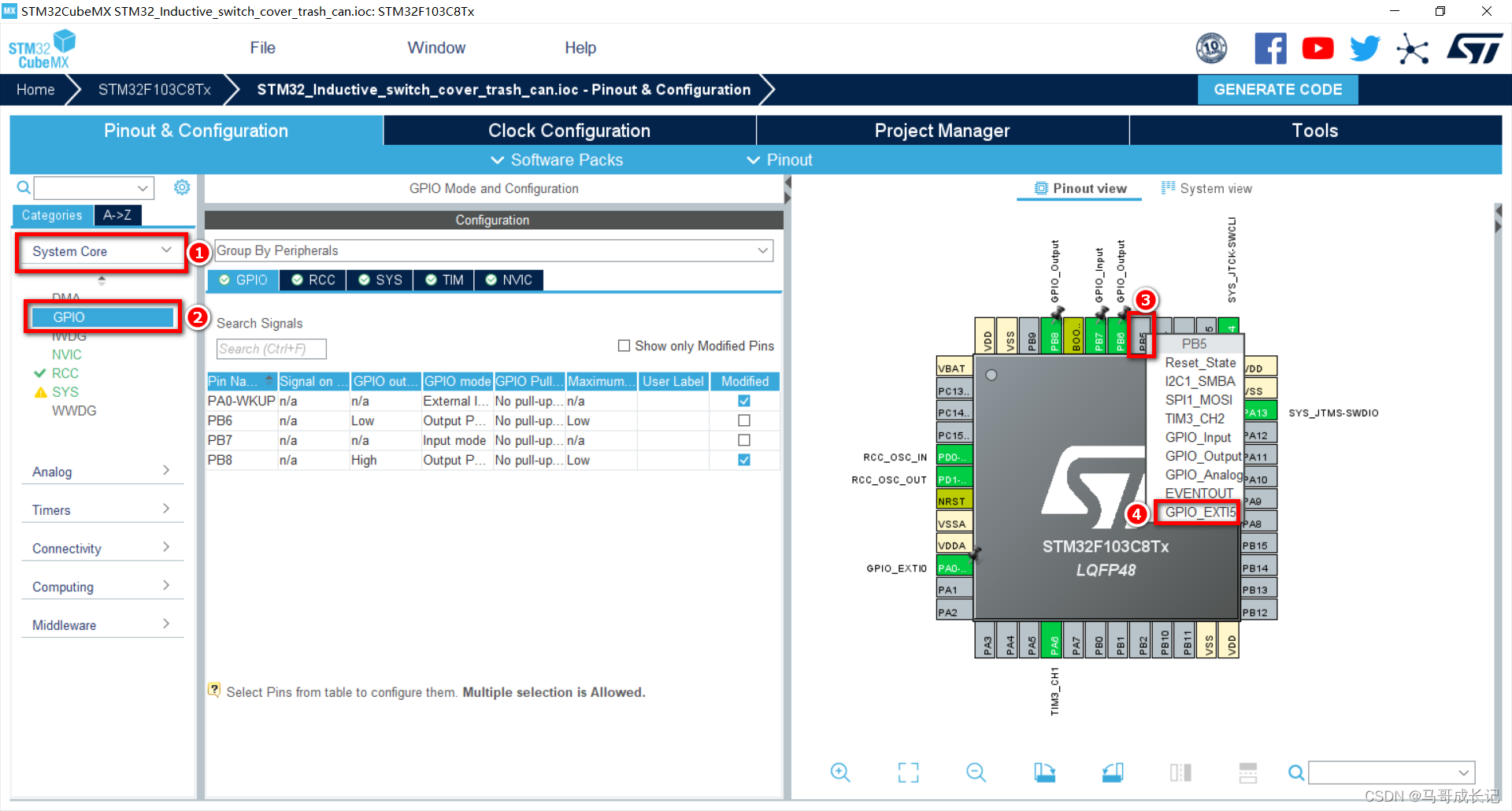
- 配置PB5为下降沿触发中断,如下图步骤。

- 修改PB5中断优先级低于延时函数中断优先级,如下图步骤。

3.3在主C文件中的外部中断服务函数进行震动开盖编写代码
- 编写思路看代码注释
//重写外部中断服务函数,实现按下KEY1开盖和振动开关盖并开灯
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_0 || GPIO_Pin == GPIO_PIN_5) //如果检测到是按下按键或者震动传感器震动,就开盖开灯
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET //检测按键按下为低电平
|| HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET) //检测震动传感器振动低电平
{
openLED1(); //开灯
openLid(); //开盖
}
}
}
4.添加蜂鸣器项目完结
4.1蜂鸣器接线
I/O ——PB4
VCC——3V3
4.2基于添加震动开盖工程配置蜂鸣器
- 配置PA4接蜂鸣器I/O口,如下图步骤。
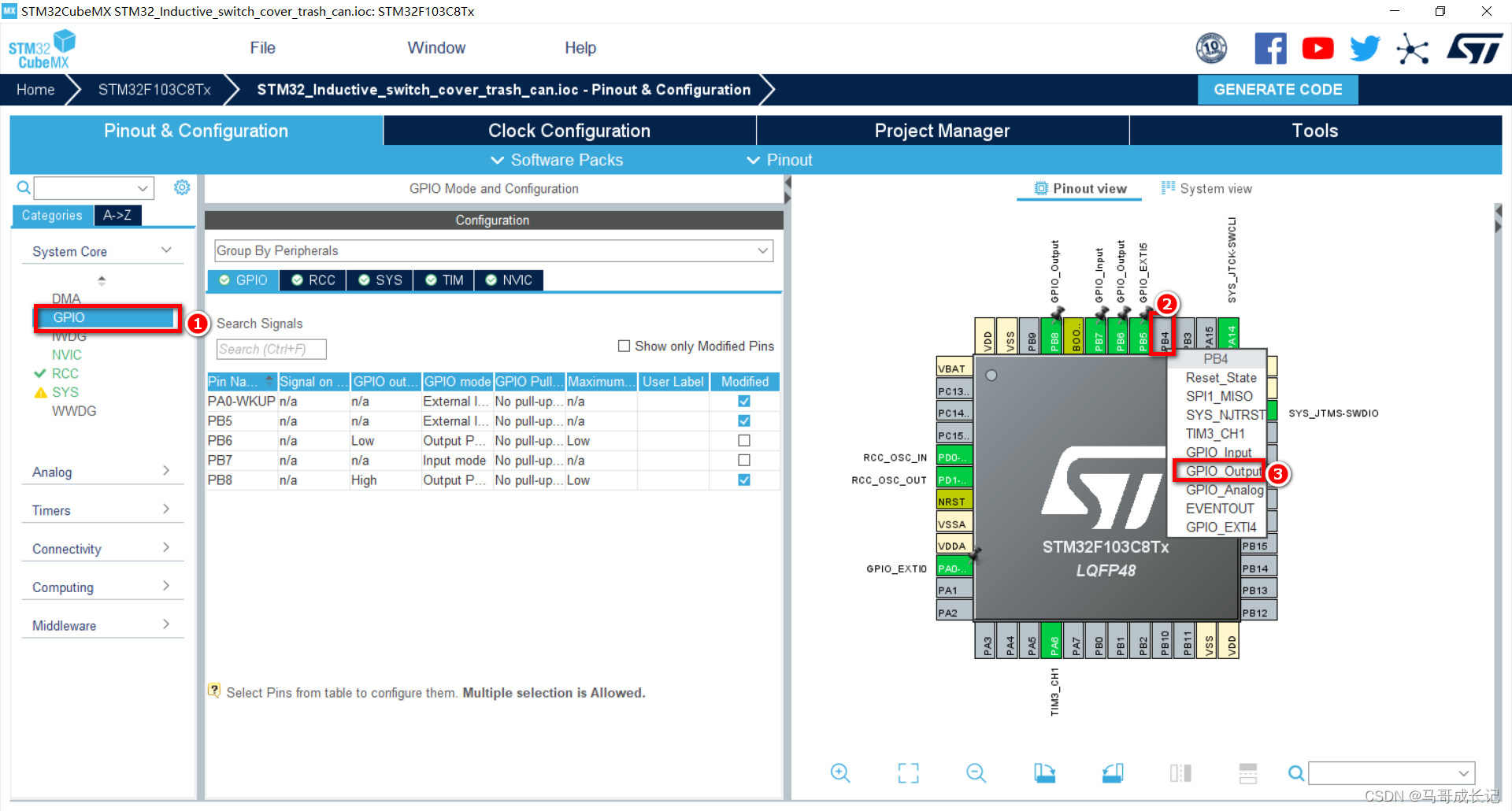
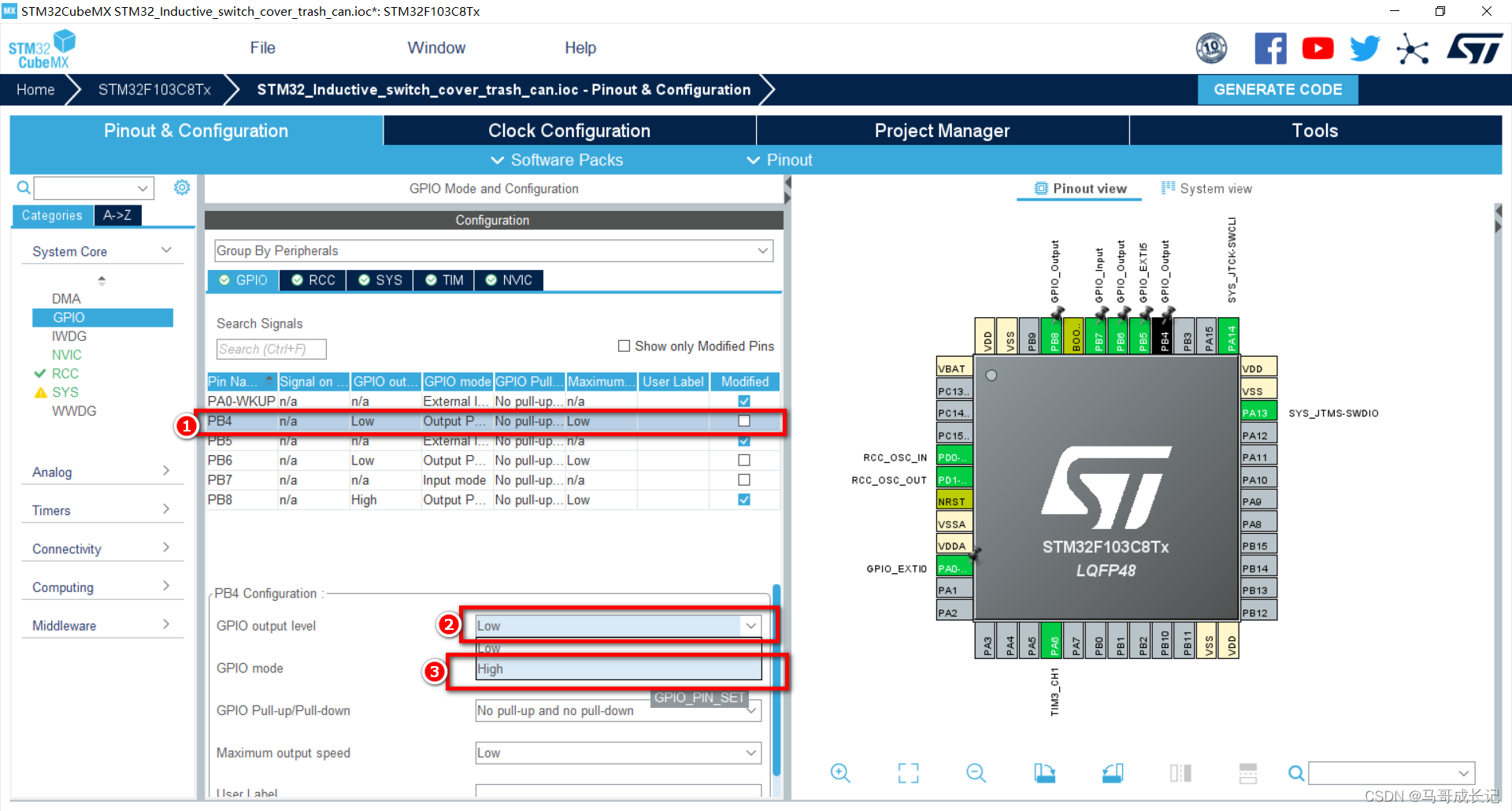
- 配置PB4默认输出高电平,使蜂鸣器不响。如下图步骤
4.3在主C文件合适位置定义开关盖宏及开关盖标志,以解决垃圾桶抽抽问题
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
//定义打开和关闭宏
#define OPEN 1
#define CLOSE 0
/* USER CODE END PM */
-------------------------
/* USER CODE BEGIN PV */
//定义开关盖标志
char flag = CLOSE;
/* USER CODE END PV */
4.4修改开关盖函数,实现开盖蜂鸣器响,解决垃圾桶抽抽问题。
- 修改开盖函数思路见代码注释。
void openLid()
{
if(flag == CLOSE) //检测开盖标志为关闭,当手挡住时,条件不成立,就不会一直抽抽
{
flag = OPEN; //让flag变为打开状态,已解决手一直挡住超声波测距导致的垃圾桶抽抽问题
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,12); //转动到70度
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);//让蜂鸣器响
HAL_Delay(100); //响100ms
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET); //让蜂鸣器不响
}
HAL_Delay(2000); //打开盖子等待两秒
}
- 修改关盖函数思路见代码注释。
void closeLid()
{
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,5); //转动到0度
HAL_Delay(50); //每50毫秒测一次距离
flag = CLOSE; //关闭盖子后,让开盖标志为关闭状态,以保证在开盖函数中能正确打开盖子
}
4.5完整项目主C文件代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
//定义打开和关闭宏
#define OPEN 1
#define CLOSE 0
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//定义开关盖标志
char flag = CLOSE;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void TIM2_Delay_us(uint16_t n_us)
{
/* 使用定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2,0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us) - 1));
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
double get_distance()
{
int cnt = 0;
//1.给Trig至少10us的高电平
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET); //Trig拉高
TIM2_Delay_us(20); //Trig拉高20us
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET); //Trig拉低
//2.Echo由低电平跳转到高电平,表示波发送
while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7) == GPIO_PIN_RESET); //等待Echo变为高电平
//波发出那一下,启动定时器
HAL_TIM_Base_Start(&htim2);
//让计数器从0开始计数
__HAL_TIM_SetCounter(&htim2,0);
//3.Echo由高电平跳转到低电平,表示波回来
while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7) == GPIO_PIN_SET); //等待Echo变为低电平
//波回来的那一下,停止计时
HAL_TIM_Base_Stop(&htim2);
//4.计算中间经过多少时间
cnt = __HAL_TIM_GetCounter(&htim2);
//5.距离 = 速度(340m/s) * 时间 / 2
return (340 * cnt / 2 * 0.000001 * 100);
/*
* 0.000001的含义为时间单位为us
* 100的含义为将米转为厘米
*/
}
void openLED1()
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
}
void closeLED1()
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
}
void initSG90_0()
{
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); //打开定时器3通道1 PWM输出
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,5); //转动到0度
}
void openLid()
{
if(flag == CLOSE) //检测开盖标志为关闭,当手挡住时,条件不成立,就不会一直抽抽
{
flag = OPEN; //让flag变为打开状态,已解决手一直挡住超声波测距导致的垃圾桶抽抽问题
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,12); //转动到70度
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);//让蜂鸣器响
HAL_Delay(100); //响100ms
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET); //让蜂鸣器不响
}
HAL_Delay(2000); //打开盖子等待两秒
}
void closeLid()
{
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,5); //转动到0度
HAL_Delay(50); //每50毫秒测一次距离
flag = CLOSE; //关闭盖子后,让开盖标志为关闭状态,以保证在开盖函数中能正确打开盖子
}
//重写外部中断服务函数,实现按下KEY1开盖和振动开关盖并开灯
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_0 || GPIO_Pin == GPIO_PIN_5) //如果检测到是按下按键或者震动传感器震动,就开盖开灯
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET //检测按键按下为低电平
|| HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET) //检测震动传感器振动低电平
{
openLED1(); //开灯
openLid(); //开盖
}
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
double distance = 0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
initSG90_0();
//提升延时函数中断优先级
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//获取距离
distance = get_distance();
//如果距离小于10厘米,LED1亮并开盖。反之LED1灭,关盖
if(distance <10)
{
openLED1();
openLid();
}
else
{
closeLED1();
closeLid();
}
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
结束语
很高兴您能看到这里,点个赞再走呗。谢谢您啦!!!
















 1727
1727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









