






generateTrajectory 生成路径
输入变量: 当前坐标pos 当前速度 vel 采样出来的目标速度sample_target_vel
- 判断速度是否在 sample_target_vel在最大最小值区间内 [min_vel_trans, max_vel_trans]
- 计算仿真的步数,num_steps
1. 根据sim_time_和sample_target_vel计算出 sim_time_distance
2. num_steps = sim_time_distance / sim_granularity_(每一小段的距离值----颗粒) - 得到每一个细分点的仿真时间 dt = sim_time_ / num_steps
- 获取得到轨迹
1. 将当前坐标点push到路径中
2. 根据当前坐标 pos, 速度loop_vel及两个点的时间 dt 计算新的点
3. 通过computeNewPositions计算得到新的点插入路径中
代码实现
computeNewPositions
Eigen::Vector3f SimpleTrajectoryGenerator::computeNewPositions(const Eigen::Vector3f &pos,
const Eigen::Vector3f &vel, double dt)
{
Eigen::Vector3f new_pos = Eigen::Vector3f::Zero();
new_pos[0] = pos[0] + (vel[0] * cos(pos[2]) + vel[1] * cos(M_PI_2 + pos[2])) * dt;
new_pos[1] = pos[1] + (vel[0] * sin(pos[2]) + vel[1] * sin(M_PI_2 + pos[2])) * dt;
new_pos[2] = pos[2] + vel[2] * dt;
return new_pos;
}
实现示意图
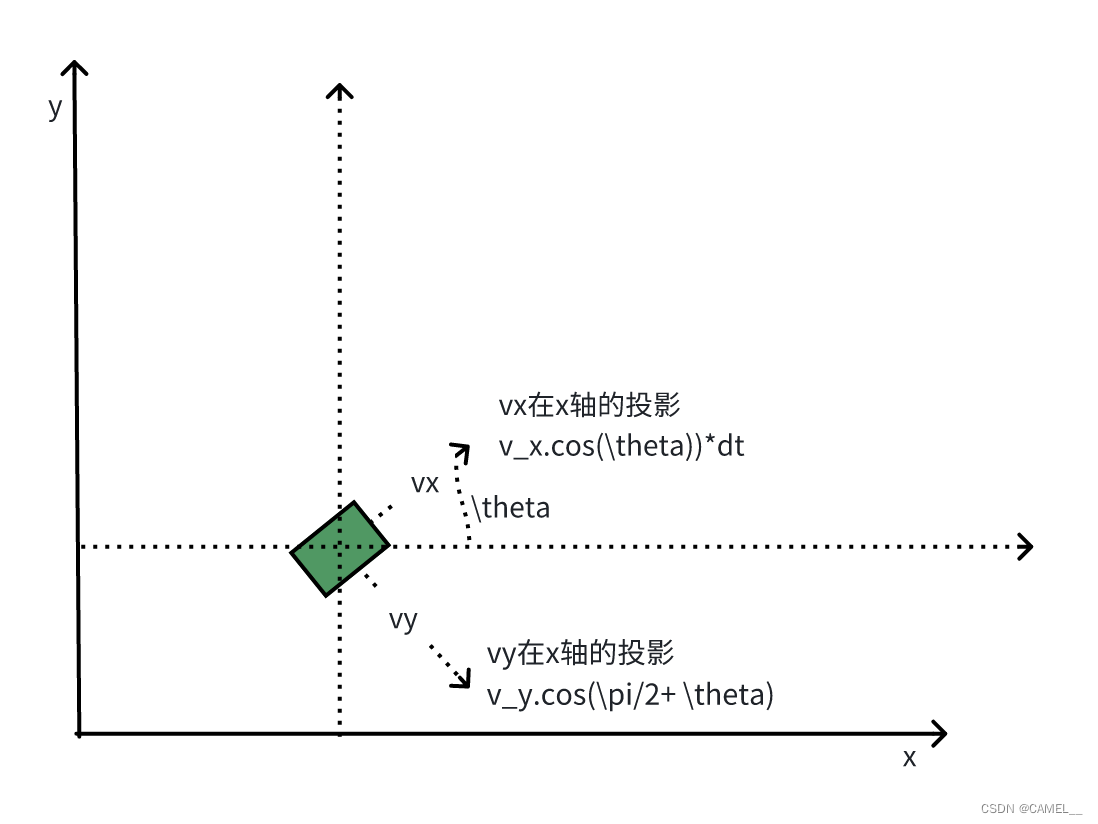
公式推导
将上图的vx vy映射到全局坐标系下,得到如下公式
x
′
=
x
+
(
v
x
.
c
o
s
(
θ
)
)
+
v
y
.
c
o
s
(
π
/
2
+
θ
)
)
.
d
t
y
′
=
y
+
(
v
x
.
s
i
n
(
θ
)
)
+
v
y
.
s
i
n
(
π
/
2
+
θ
)
)
.
d
t
θ
′
=
θ
+
ω
.
d
t
x' = x + (v_x.cos(\theta)) + v_y.cos(\pi/2+ \theta)).dt \\ y' = y + (v_x.sin(\theta)) + v_y.sin(\pi/2+ \theta)).dt\\ \theta' = \theta + \omega.dt
x′=x+(vx.cos(θ))+vy.cos(π/2+θ)).dty′=y+(vx.sin(θ))+vy.sin(π/2+θ)).dtθ′=θ+ω.dt















 1866
1866











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









