







 超级会员免费看
超级会员免费看
 本文详细介绍了自动驾驶感知算法中的语义分割技术,包括FCN、UNet、STDC和DeepLabV3+等网络结构。FCN开启了语义分割新时代,但其结果不够精细;UNet通过跳层连接实现高精度分割,但速度较慢;STDC算法在速度与精度间找到了平衡;DeepLabV3+则通过空洞卷积和ASPP模块提取多尺度信息,提高分割准确度。未来,语义分割技术将追求更清晰的边缘分割、与频率域结合以及利用Transformer提升性能。
本文详细介绍了自动驾驶感知算法中的语义分割技术,包括FCN、UNet、STDC和DeepLabV3+等网络结构。FCN开启了语义分割新时代,但其结果不够精细;UNet通过跳层连接实现高精度分割,但速度较慢;STDC算法在速度与精度间找到了平衡;DeepLabV3+则通过空洞卷积和ASPP模块提取多尺度信息,提高分割准确度。未来,语义分割技术将追求更清晰的边缘分割、与频率域结合以及利用Transformer提升性能。
自动驾驶感知算法实战专栏:https://blog.csdn.net/charmve/category_12097938.html
目录
1 什么是语义分割技术?
近年来,随着深度学习技术的快速发展,计算机视觉领域中的许多使用传统方法难以解决的任务都取得了巨大的突破。特别是在图像语义分割领域,深度学习技术的作用表现尤为突出。图像语义分割作为计算机视觉中一项基础且具有挑战性的任务,其目标是将对应的语义标签分配给图像中的每个像素,其结果是将给定图像划分为若干视觉上有意义或感兴趣的区域,以利于后续的图像分析和视觉理解。
下图是在 Cityscapes 数据集上的图像原图和其对应的 ground truth。可以看到,图像分割任务要求对原图的每一个像素进行逐像素预测其类别。由于需要逐像素预测该物体所属类别,这对深度学习模型提出了巨大的挑战,比如部分目标尺寸较小、难以识别,部分目标大部分被遮挡,导致其辨识度降低等。
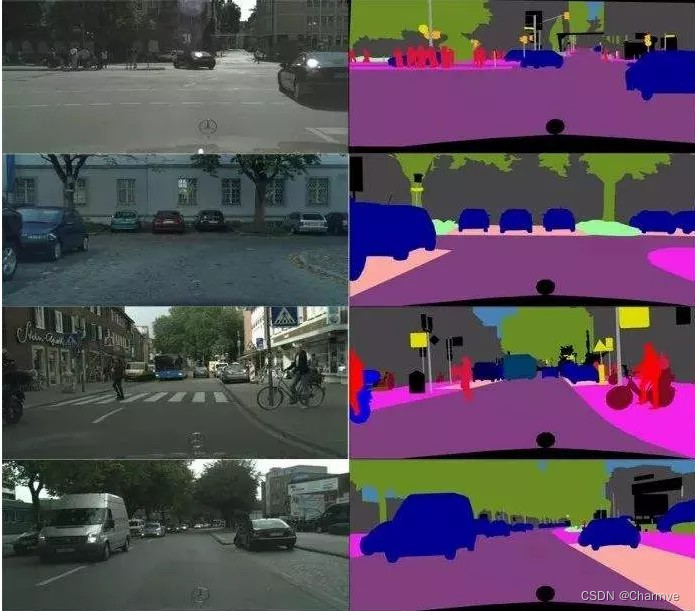
尽管存在着上述各种各样的困难&#

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











