







专栏解读:
-
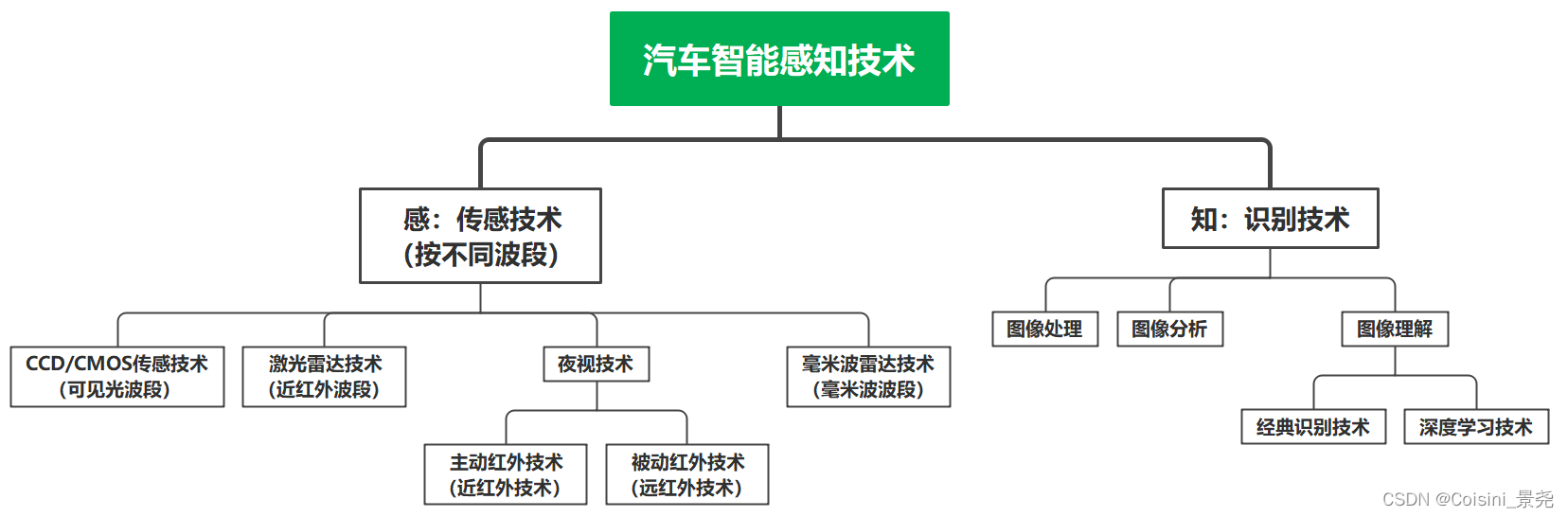
本专栏针对自动驾驶技术(智能网联汽车技术)中的感知技术进行详细介绍。
-
包含:
- 汽车感知技术概念
- 多传感器融合原理
- 各传感器原理及应用(超声波,毫米波,激光雷达,视觉传感器,全球定位系统)
-
专栏知识框架如下图:
-
ps:
- 2023年,博主给自己定制了汽车领域感知,决策,控制算法的开发,通信,诊断相关的学习计划,且会每周持续分享。—— 感谢您的关注!
- 如果在阅读,理解,提出建议和整改要求或一起学习进步赢高薪,可通过微信 Johnny-03-17一起学习探讨哦,欢迎您的加入~

一、传感器的概念
-
根据国标GB/T 7665 - 2005中,对于传感器的定义:
- 能感受被测量并按照一定的规律转换成可用输出信号的器件或装置,通常由敏感元件和转换元件组成。
- 我们拆分一下:
- 感受被测量
- 按照一定的规律转换成可用输出信号(常用为电信号)
- 主要组成:敏感和转换元件
-
由此我们可以推出传感器的基本组成
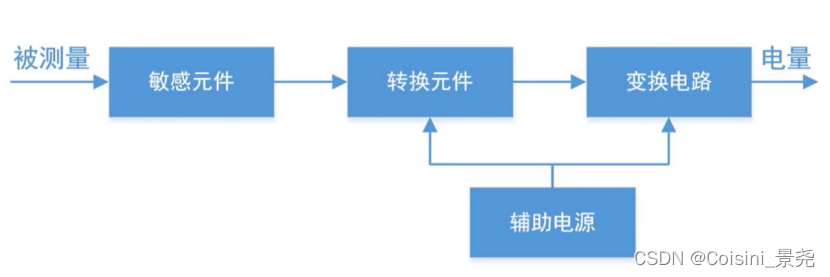
- 图示拆解
- 敏感元件 —— 感受被测量
- 转换元件 —— 将其按照一定的规律进行转换,输出可用的信号(一般转换为电信号,且转换后的电信号会比较微弱或不便于处理)
- 变换电路 —— 对于转换元件输出的信号进行去噪或放大
- 辅助电源 —— 转换元件和变换电路需要供电
二、传感器的分类
ps:想象一下我们人类自己的五官,也是传感器,且具备不同的作用,比如眼,耳,手,鼻,嘴…
- 光敏传感器 —— 视觉(眼睛)
- 声敏传感器 —— 听觉(耳朵)
- 气敏传感器 —— 嗅觉(鼻子)
- 化学传感器 —— 味觉(嘴巴舌头)
- 压敏,温敏,流体传感器 —— 触觉(手脚)
三、传感器的特点和应用领域
-
特点
- 检测时 —— 精确度高,灵敏度高
- 可靠性 —— 环境适应性强
- 智能化 —— 进行后期数据的自动运算,分析和处理
- 性价比 —— 普及度
-
应用领域
- 工业,汽车电子,通信电子,消费电子
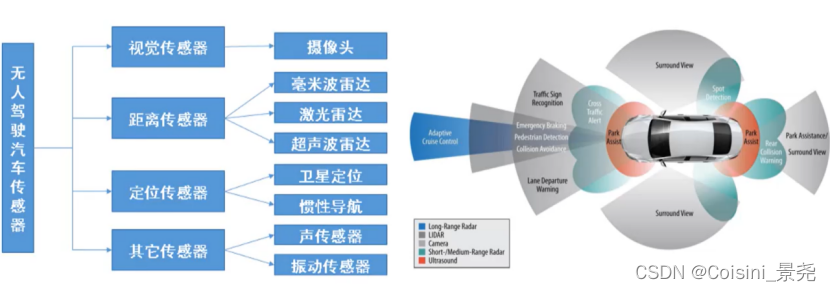
- ps : 本专栏主要讲汽车电子和通信电子哦~ ~附上智能网联汽车的传感器图,如下:
- ps : 本专栏主要讲汽车电子和通信电子哦~ ~附上智能网联汽车的传感器图,如下:
- 工业,汽车电子,通信电子,消费电子
-
图示拆解
- 视觉传感器 —— 主要提取轨道线,追踪和识别特定的目标
- 距离传感器 —— 自车与障碍物的距离
- 定位传感器 —— 我在哪?精确我当前的位置,对路线规划决策提供重要信息
- 其他传感器 —— 周围的车辆数量,路面的工况等
四、传感器的基本特性 —— 静态特性
-
定义:
- 一般是指传感器的输出和输入之间的关系。
-
静态特性
- 定义
-
在静态信号作用下,传感器输出与输入量之间的一种函数关系,可表示为:

-
常用指标:灵敏度,精确度,线性度,重复性等。。。
-
- 定义
-
灵敏度
- 定义
- 指达到稳定状态时,输出增量与输入增量的比值,如下图:

- 指达到稳定状态时,输出增量与输入增量的比值,如下图:
- 图示拆解
- K = 灵敏度
- ▲y = 输出增量
- ▲x = 输入增量
- ps:K比值 = 斜率,线性传感器的灵敏度就是静态特性的斜率(是一条直线),而非线性传感器的灵敏度是其静态特性曲线某点处的斜率(是一条曲线)。
- 定义
-
线性度
-
定义
- 传感器输出量与输入量之间的实际关系曲线偏离直线的程度,称为:非线性误差,如图:
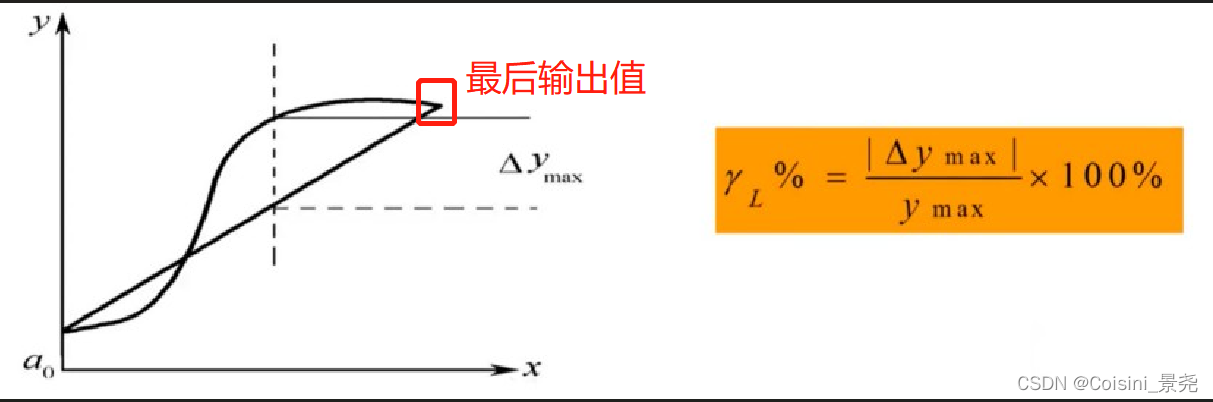
- 传感器输出量与输入量之间的实际关系曲线偏离直线的程度,称为:非线性误差,如图:
-
图示拆解
- ▲y max = 曲线垂直方向最大的偏差
- y max = 最大输出值
- a0 = 零位输出值(被测量为零时传感器的指示值)
-
-
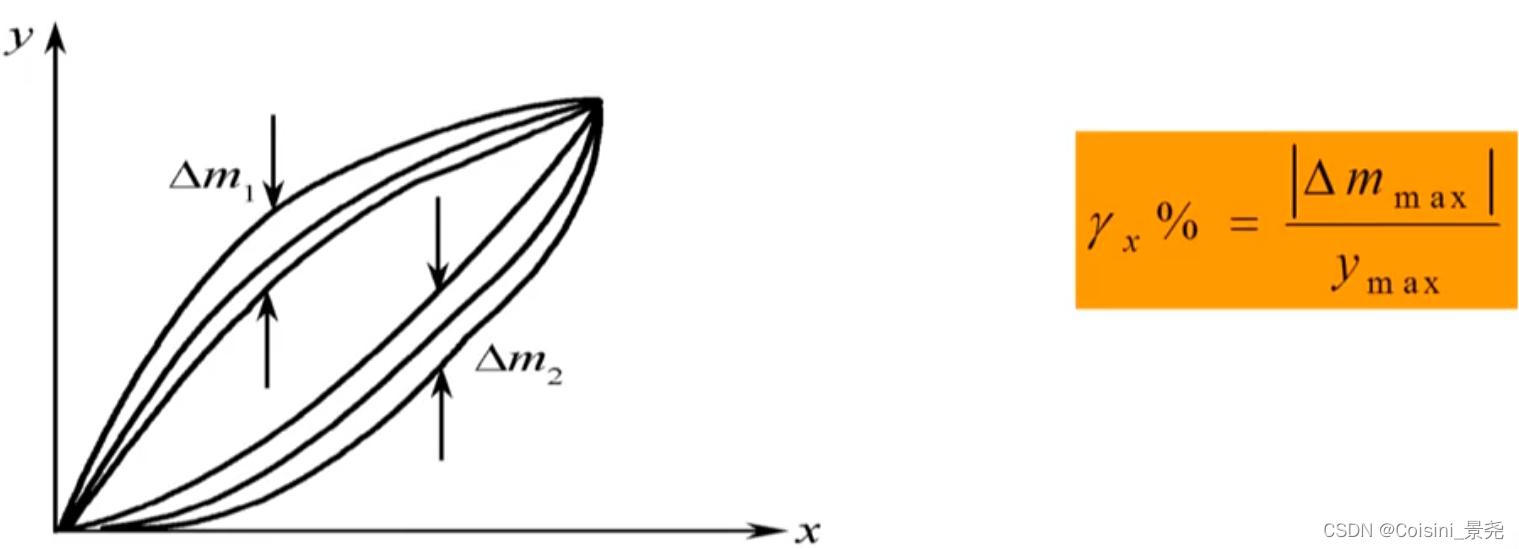
重复性
- 定义:
- 表示传感器输入量按同一方向作全量程连续且多次变动时得到的特性曲线的不一致程度,如图:
- 表示传感器输入量按同一方向作全量程连续且多次变动时得到的特性曲线的不一致程度,如图:
- 图示拆解
- ▲m max = ▲m1.▲m2…▲m n 的最大值
- y max = 满量程的输出值
- 传感器的不重复性的原因如下:
- 传感器的机械部分的磨损,松动
- 部件内的摩擦,电路元器件老化
- 工作点漂移。。。
- 定义:
-
迟滞现象
-
定义:
- 传感器在正向行程(输入量增大)与反向行程(输入量减少)期间输出和输入曲线不重合的程度,也叫做不重合性,如图:
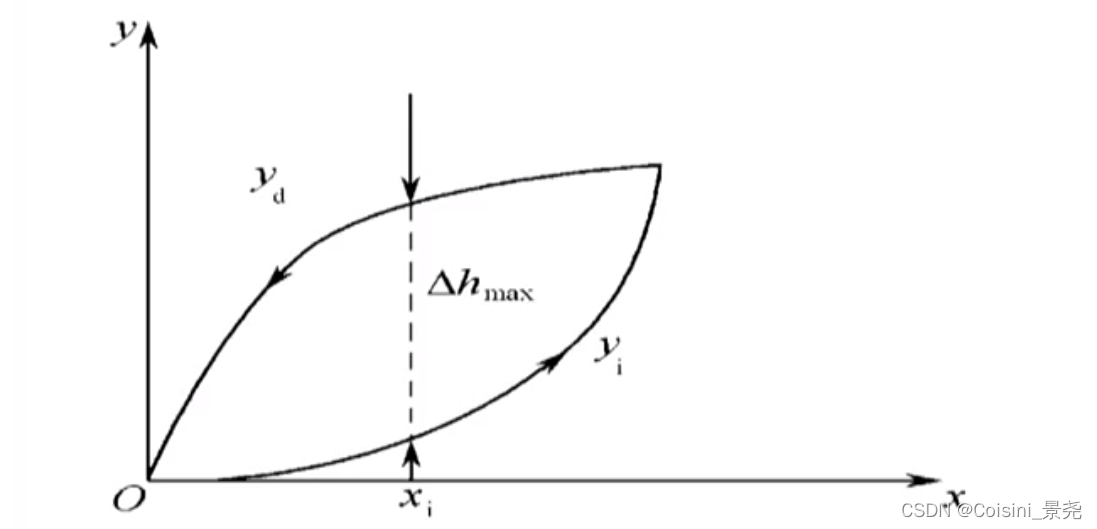
- 传感器在正向行程(输入量增大)与反向行程(输入量减少)期间输出和输入曲线不重合的程度,也叫做不重合性,如图:
-
不重合性原因如下:
- 制造工业的缺陷,如轴承摩擦,间隙,松动,元件腐蚀等
-
-
精确度(重要***)
- 定义
- 传感器的输出指示值与被测量约定真值的一致程度,反应了传感器的可靠性程度,如图:

- 传感器的输出指示值与被测量约定真值的一致程度,反应了传感器的可靠性程度,如图:
- 图示拆解
- A = 精确度
- ▲A = 传感器在测量范围内允许的最大绝对误差的值
- y max = 满量程输出值
- 定义
-
分辨力(重要***)
- 定义:
- 传感器在规定测量范围内所能检测到的输入量的最小变化量的能力
- 解释:
- 被测量的值低于这个值就检测不到了。当被测量的变化值小于分辨力时,传感器对输入量是无变化!
- 定义:
-
稳定性
- 定义:
- 在室温条件下经过一定时间间隔,传感器的输出与起始标定的输出之间的差异。(一般都是长期稳定性表示,也就是年,月,日)
- 定义:
-
漂移
- 定义:
- 传感器在外界的干扰下,与输入量数量等无关,而是由于外接干扰引起的变化(越小越好)
- 分类:
- 时间漂移:在规定条件下,零点和灵敏度随时间的变化
- 温度漂移:因温度引起的,零点和灵敏度随时间的变化
- 定义:
五、传感器的基本特性 —— 动态特性
- 定义:
- 传感器在测量快速变化的输入信号情况下,输出对输入的相应特性
- 区别:
- 静态特性:是传感器在测量静态信号,被测量不随时间变化,所以记录和测量的过程中,不受时间限制。
- 动态特性:是传感器在测量动态信号,所以不仅能够测量信号的幅值的大小,还需要显示被测量信号随时间变化的规律,能够再现被测量的波形。
- 动态信号:随着时间的变化的信号。
PS1:下一章会详细介绍多传感器的融合原理与系统架构,由浅入深,希望能给您带来帮助
PS2:本专栏持续更新中,感谢关注,写的不对的地方,诚挚欢迎您指正,谢谢




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











