







专栏解读:
-
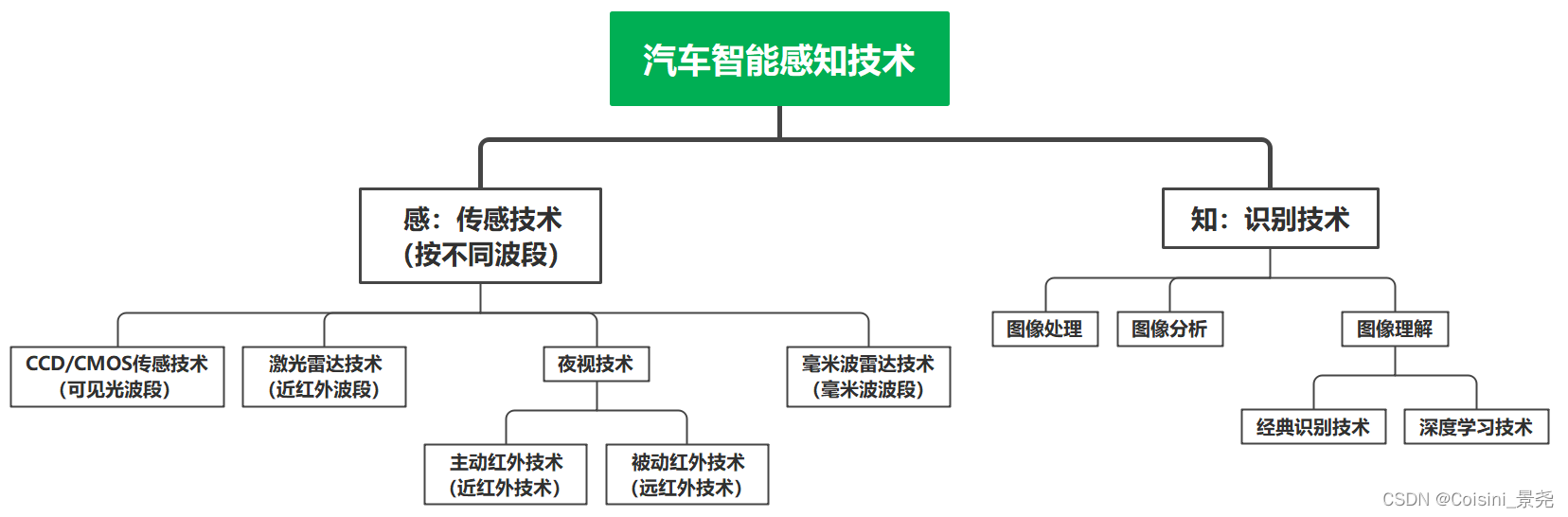
本专栏针对自动驾驶技术(智能网联汽车技术)中的感知技术进行详细介绍。
-
包含:
- 汽车感知技术概念
- 多传感器融合原理
- 各传感器原理及应用(超声波,毫米波,激光雷达,视觉传感器,全球定位系统)
-
专栏知识框架如下图:
-
ps:
- 2023年,博主给自己定制了汽车领域感知,决策,控制算法的开发,通信,诊断相关的学习计划,且会每周持续分享。—— 感谢您的关注!
- 如果在阅读,理解,提出建议和整改要求或一起学习进步赢高薪,可通过微信 Johnny-03-17一起学习探讨哦,欢迎您的加入~

一、毫米波雷达的概念
-
概念:
- 毫米波实质上就是电磁波,但是频段比较特殊,频率高于无线电,低于可见光和红外线
- 车规级雷达频率:
- 24GHz —— 波长 12mm
- 77GHz —— 波长 4mm
- ps:至于为什么选择22GHz和77GHz,是因为电磁波的每一个频段都会按照规定,分配给特定的设备 or 行业,以防止设备信号之间的相互干扰。而24GHZ和77GHz就是国际电信联盟专门划分给车用雷达的频段
-
特点:
- 探测性能稳定 —— 不受被测物体表面形状,颜色的影响,对大气等适应性强
- 探测距离较长 —— 最长250m左右,能够满足车辆在高速行驶环境下,对较远距离范围内的环境监测要求
- 环境适应性良好 —— 较强的穿透力,能够透过烟雾,泥土,雨水,环境适应能力强
- 举个例子:
我们通常看到的灰尘直径为1微米-100微米之间,雨点的直径0.5mm-4mm之间,波长 跟他们相等或者更长的电磁波,可以轻易的穿透这些障碍物.
- 举个例子:
- 波束比较窄,具有较强的抗干扰能力
- 体积小,性能高
- 全天候工作
- 多目标跟踪
-
分类:
- 脉冲式毫米波雷达
- 采用脉冲的方式,短时间内发射大功率的脉冲信号,通过脉冲信号控制雷达的压控振荡器,从低频瞬时跳到高频
- 调频连续波毫米波雷达(主要)
- 发射的连续调频信号遇到目标时,就会产生与发射信号有一定时延的回波,在通过雷达的混频器进行混频处理
- 可以同时得到目标的相对距离和相对速度
- ESR毫米波雷达(ESR = electronically scanning reader)
- 电子扫描毫米波雷达,适应范围呢同时检测到64个目标,发射波段为76GHZ-77GHZ,同时具有中距和远距的扫描能力
- 脉冲式毫米波雷达
-
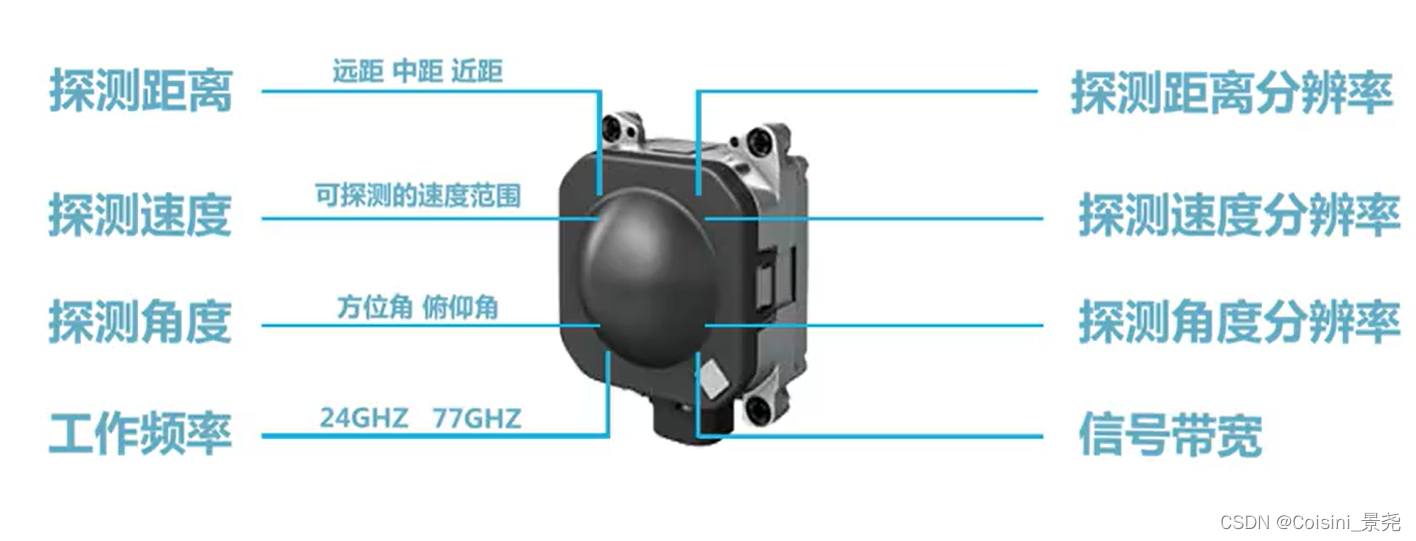
毫米波雷达的主要参数:
二、毫米波雷达的构造
-
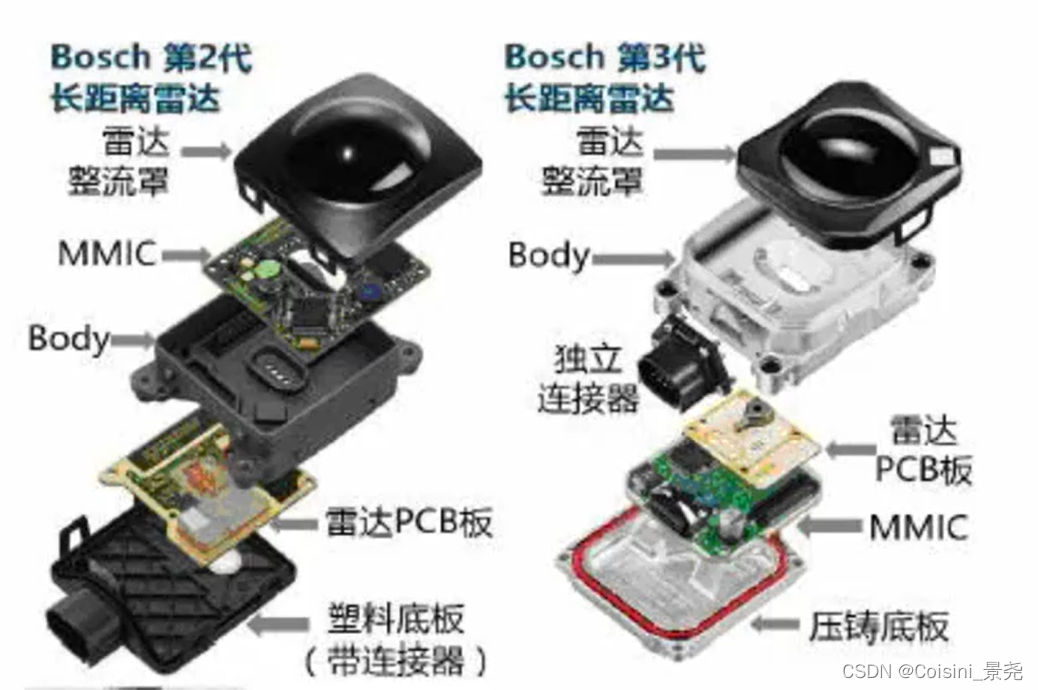
博世公司的毫米波构造如下图:
-
图示拆解(核心):
- MMIC —— 前端单片微波集成电路
- 是多功能电路
- 包含:低噪声放大器(LNA),功率放大器,混频器,以及收发系统等功能
- 特点:电路损耗小,噪声低,频带宽,动态范围大,功率大,附加功率高,抗电磁辐射能力强
- PCB板 —— 雷达天线高频PCB板
- 微带阵列(主流方案)
- 高频PCB板集成在普通PCB板上实现天线功能,需要在较小的集成空间中保持天线足够的信号强度
- 因为毫米波波长为几个毫米,由于天线尺寸和波长相当,所以毫米波雷达的天线很小,从而可以使用多跟天线来构成阵列天线,达到窄波束的目的,随着收发天线个数的增多,这个波束可以很窄
- 由于波长很短,毫米波可以使用一种微带贴片天线,在PCB板上的Ground层上铺几个开路的微带线,就能做天线,这个导致毫米波雷达的天线可以作为PCB板。
- 微带阵列(主流方案)
- MMIC —— 前端单片微波集成电路
-
平面天线阵列雷达
- 如下图:

- 平面天线阵列,如下图:
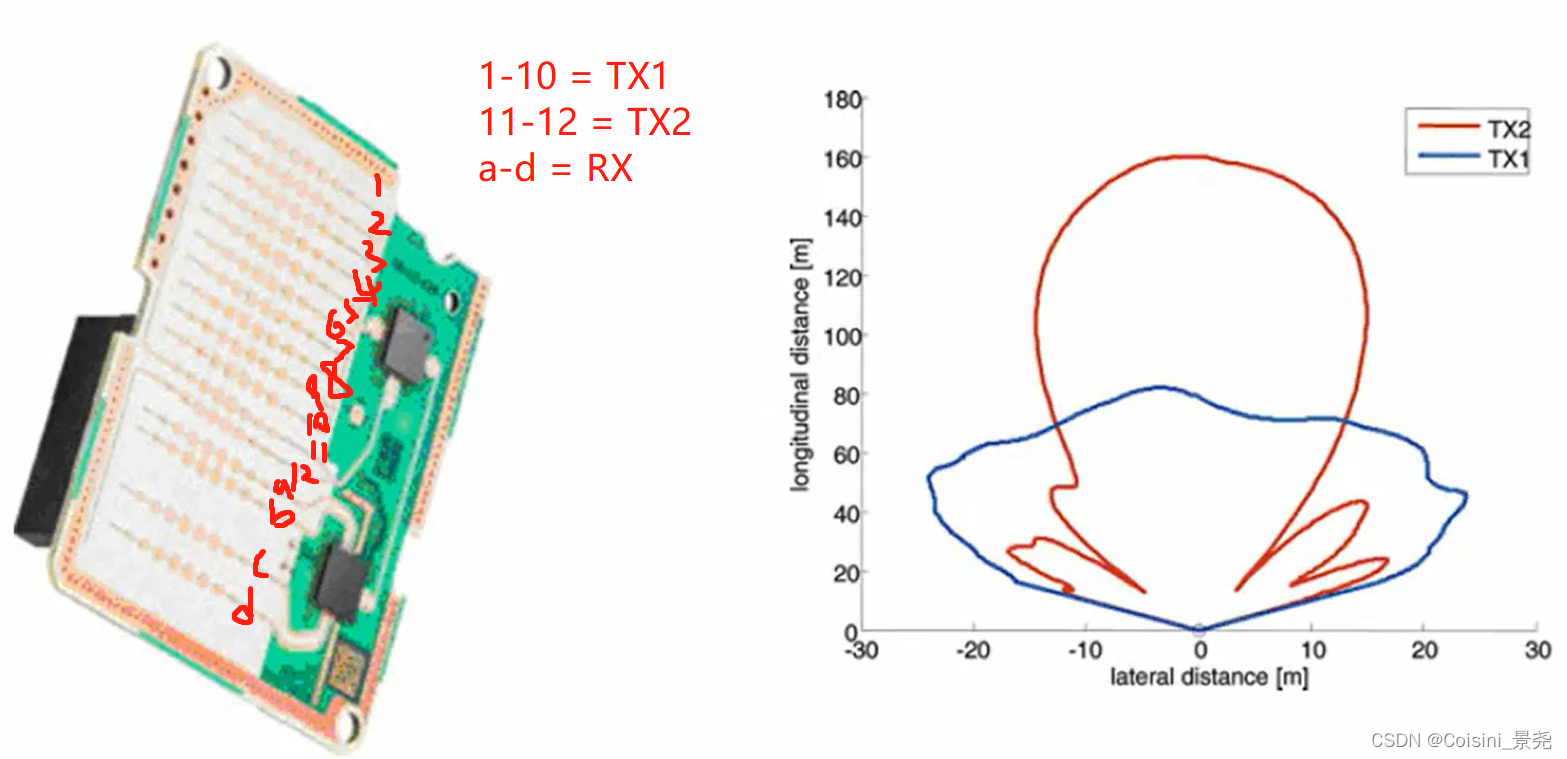
- 图示拆解:
-
TX1 = 近发射天线 = 蓝色标注区域
- 探测距离近,但是FOV(视场角)比较大
-
TX2 = 远发射天线 = 红色标注区域
- 方向性比较好
- 探测距离远,FOV(视场角)相对比较小
-
RX = 接收天线
- 测距,测速,测位置
-
- 如下图:
三、FMCW毫米波雷达的工作原理
-
FMCW雷达系统所有信号的频率随时间呈线性变化,通常我们叫做Chirp
- 如下图:
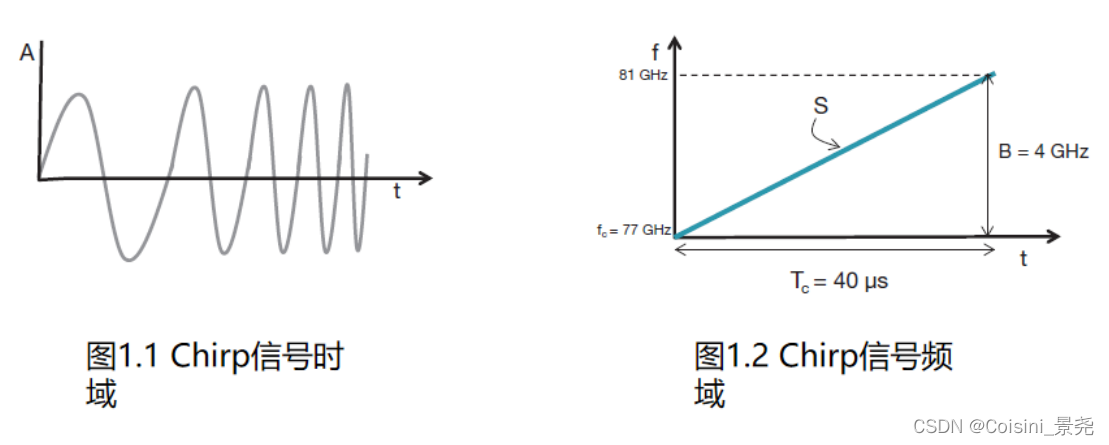
- 如下图:
-
工作原理
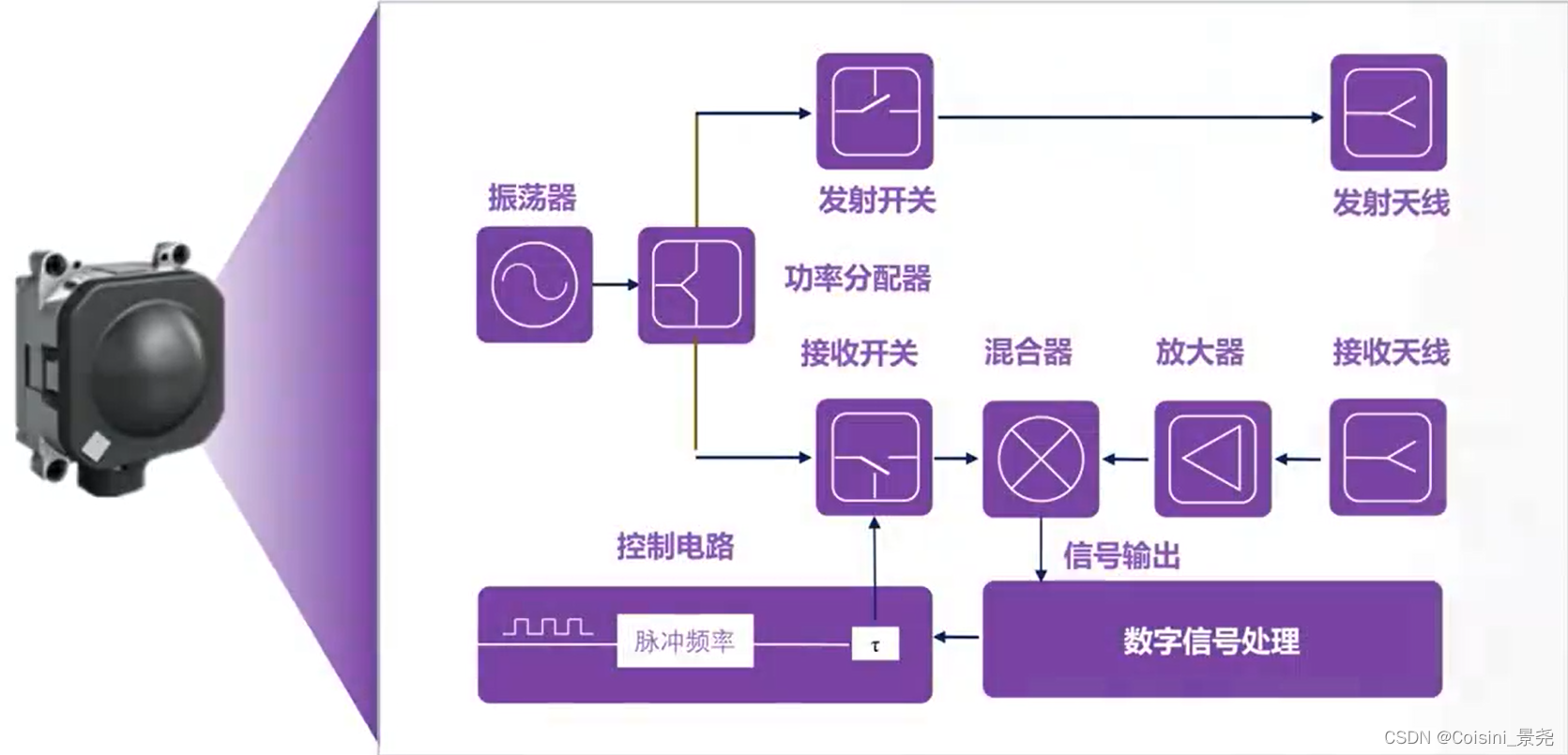
- 振荡器产生信号,信号经过功率分配器发射开关,发射天线发射给目标,
- 接收天线在接收到目标的反射信号后,经过放大器进行放大,混合器将发射信号与接收信号进行混频,得到IF信号,IF信号传给信号处理模块处理,控制电路控制整个雷达的工作。
- 结构如下图:
-
测距原理(调频连续波毫米波雷达)
- 测距工作原理:
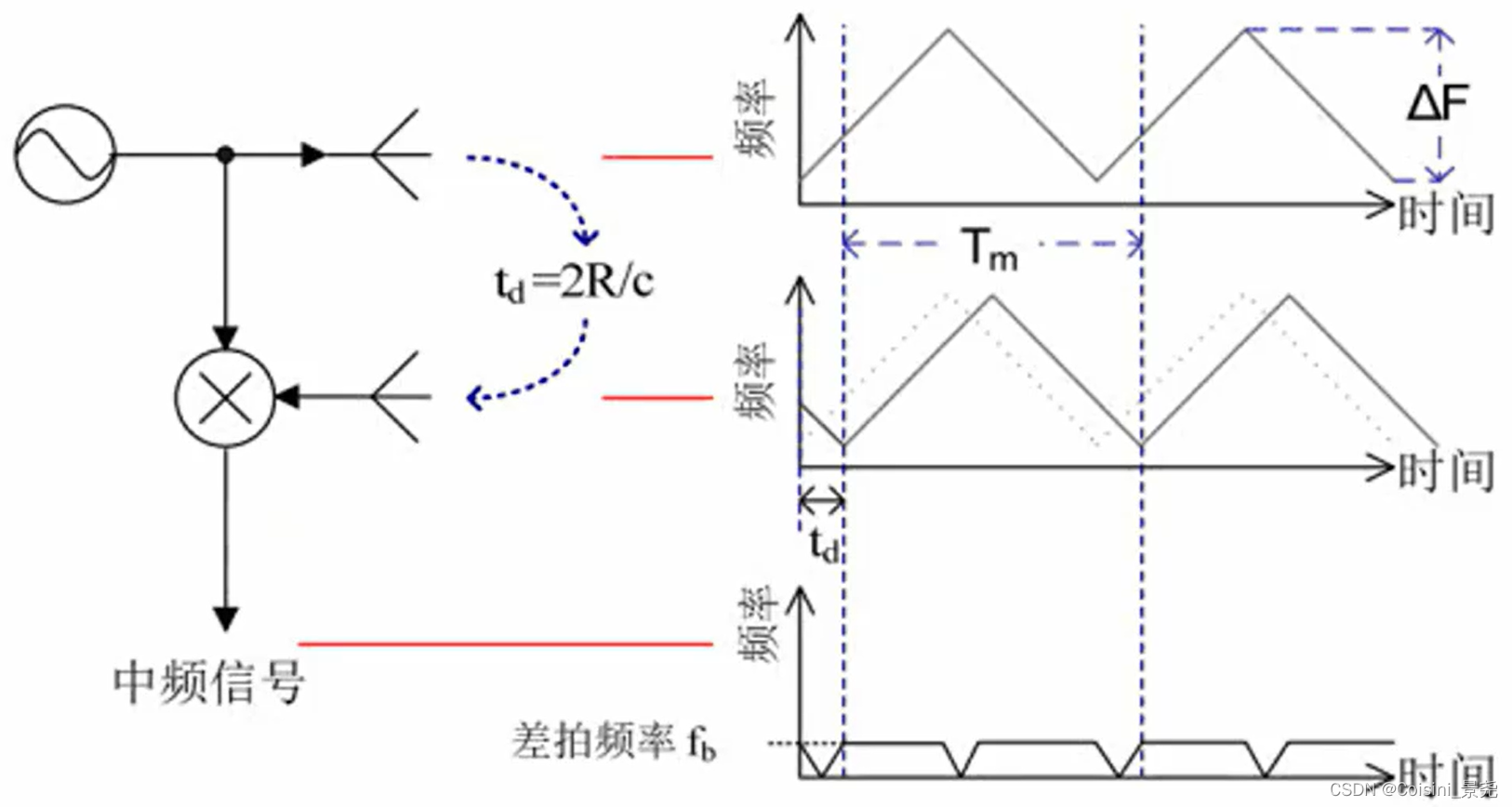
- 振荡器会产生一个频率随时间逐渐增加的信号,信号遇到障碍后,会反弹回来,时延是二倍的距离/光速(光速来代替毫米波传播的速度),返回来的波形和发出的波形有一个频率差,频率差和时延呈线性关系,物体越远返回波形,收到的时间越晚。反之,那么跟入射波的频率差值就越大。将两个频率做一个减法,就可以得到二者频率的差频(差拍频率),通过判断差拍频率的高低,就可以判断障碍物的距离。
- 如下图:
- 测距计算原理:
- 发射天线发射出一个线性调频信号,接收天线所接收到的信号实际上就是发射信号的延时副本,发射信号与接收信号进行混频,得到IF中频信号,IF中频信号的频率等于发射信号与接收信号的频率差

- 图示拆解:
- s —— 线性调频波的斜率
- τ —— 接收时延
- d —— 目标距离
- c —— 光速
-
测速原理
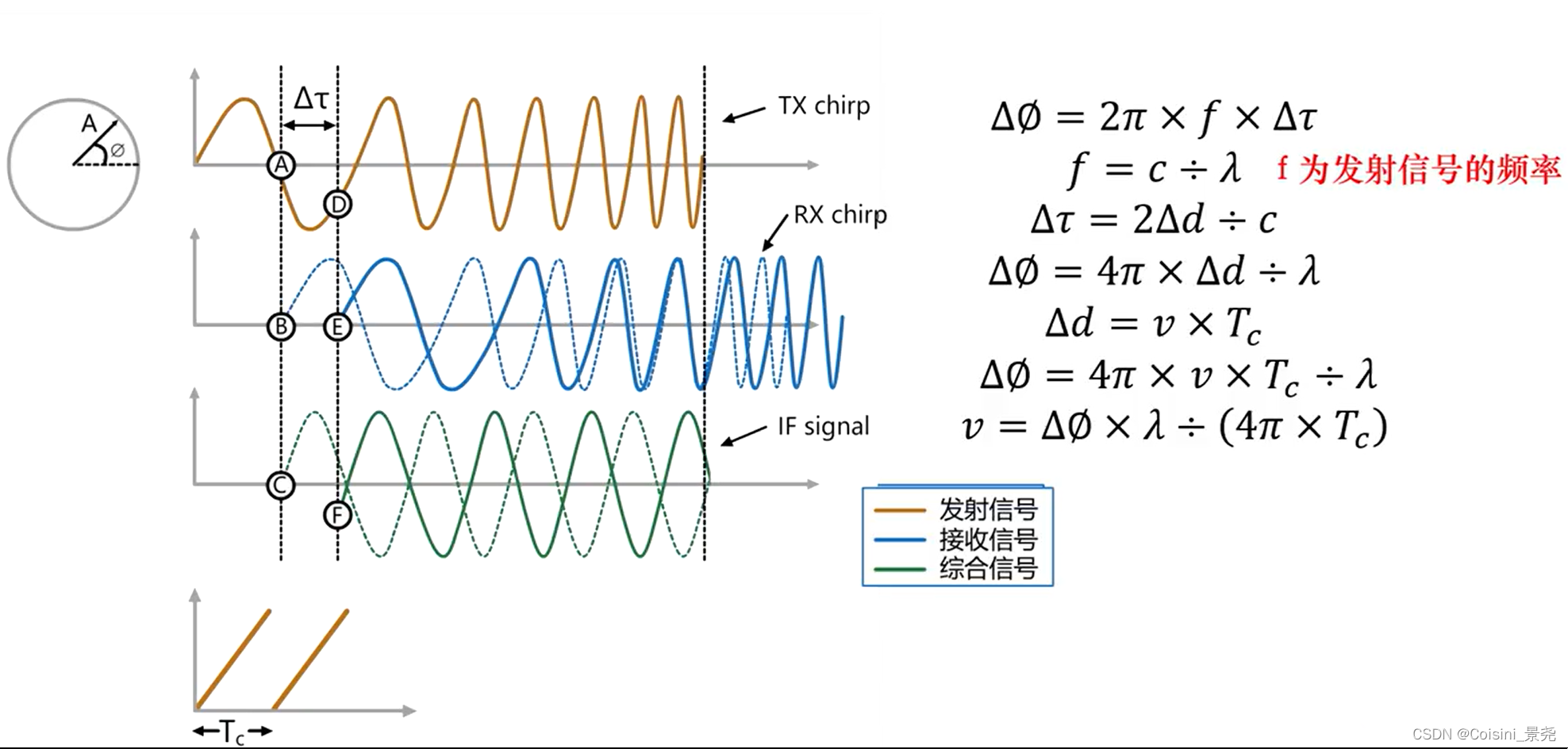
- 根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量。当目标和自车接近时,回波的频率相比发射频率有所升高,反之则频率降低。
- 如下图:
-
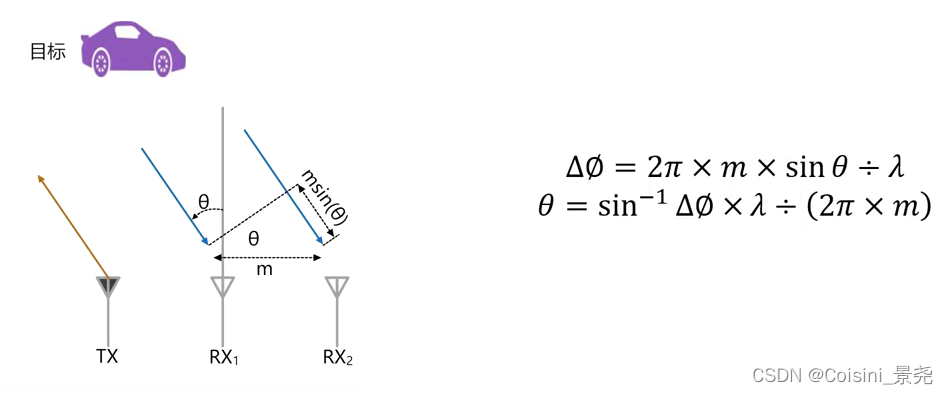
测角原理
-
是通过多个接收天线接收到信号的时延来实现
-
举个例子:
- 假如有2根天线接收从某个方向的电磁波,电磁波到达两个接收天线的时间是有差值的(或者说有相位差)。通过相位差就可以评估信号的角度。
-
如下图:
-
图示拆解:
- TX发出毫米波,到达目标后发射,回波被RX1和RX2接收,但是有一定的时延的相位差,相位差根据毫米波传播的速度(光速),可以得到距离值b,两个天线的距离d已知的,是一个直角三角形,就可以求得这个方位角。
-
-
分辨率:
- 雷达可以区分2个物体的最近距离
- 两个物体靠的很近,毫米波雷达可能将其列为一个物体,如果分的开一点,就可以探测到2个物体。究竟多远?可以区分?就叫做分辨率
- 计算公式:光速/(雷达带宽 X 2)
四、毫米波雷达在自动驾驶车辆的应用
-
按驾驶等级区分:
- L0-L1.5:ACC,AEB,FCW,BSD,LCA等
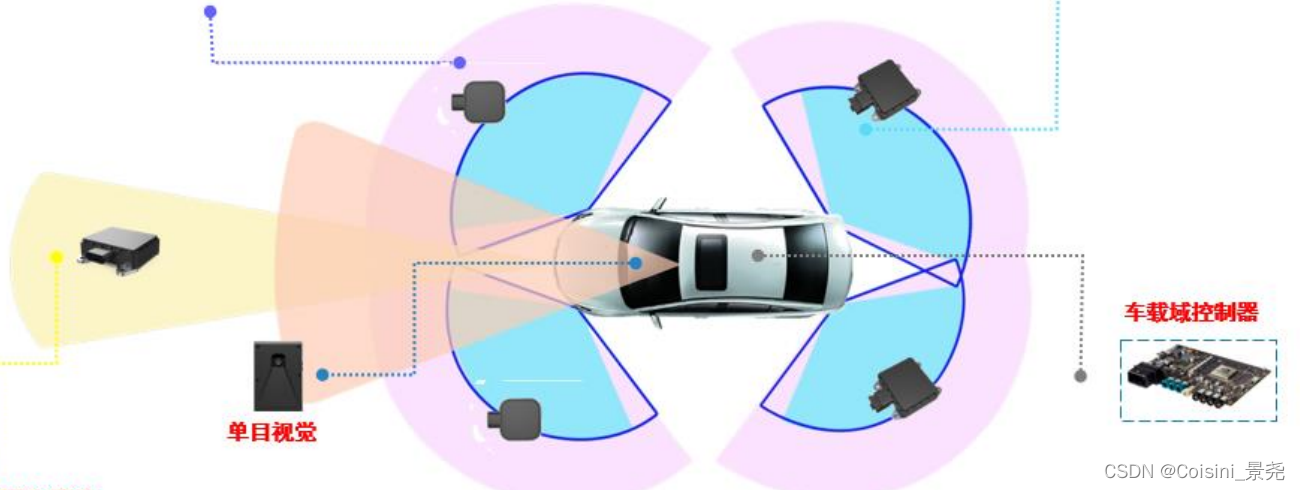
- L2-L2.5:采用多传感器融合,例如3R1V,5R1V,实现pilot功能
- 5R1V传感器分布如下图:
- 毫米波分布如下图:

-
主流频段:
- 24GHZ(过渡) —— 短距(SRR)—— 波长12.5cm
- 76-77GHZ(主要) —— 中长距(MRR,LRR) —— 波长4mm
- 79GHZ(发展中)
- ps:频率越高,距离和速度的检测分辨率越高
-
主流供应商的毫米波雷达产品展示(过往)
- 如下图:

- 如下图:
PS1:下一章会详细介绍视觉传感器的原理和应用,由浅入深,希望能给您带来帮助
PS2:本专栏持续更新中,感谢关注,写的不对的地方,诚挚欢迎您指正,谢谢!


















 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











