







 本文介绍了智能网联汽车(ICV)的概念,包括其搭载的先进传感器和网络技术,实现V2X智能信息交换。同时,文章阐述了SAE的自动驾驶分级标准以及智能网联汽车的环境感知、决策规划、控制执行等关键层级。此外,提到了智能网联汽车的物理和逻辑结构,强调了信息感知和决策控制的重要性。
本文介绍了智能网联汽车(ICV)的概念,包括其搭载的先进传感器和网络技术,实现V2X智能信息交换。同时,文章阐述了SAE的自动驾驶分级标准以及智能网联汽车的环境感知、决策规划、控制执行等关键层级。此外,提到了智能网联汽车的物理和逻辑结构,强调了信息感知和决策控制的重要性。
一、智能网联汽车定义:
1、定义:
-
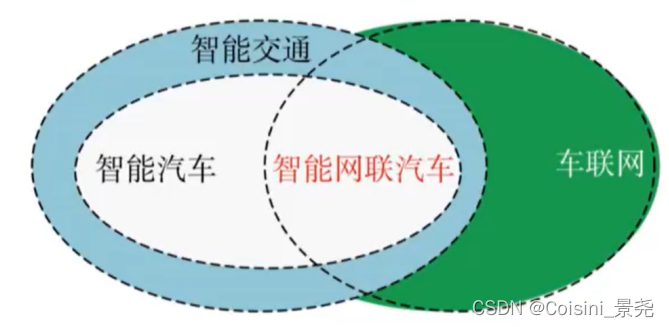
智能网联汽车(Intelligent Connected Vehicle,ICV)是指车联网与智能车的有机联合,是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现V2X(X:车、路、行人及云端等)智能信息交换共享,具备复杂的环境感知、智能决策、协同控制和执行等功能,可实现安全、舒适、节能、高效行驶,并最终可替代驾驶员来操作的新一代汽车。
-
定义拆解:
-
智能 – 车身搭载的先进传感器,控制器,执行器等装置和车载系统模块,具备复杂环境感知、智能化决策和控制等功能
-
网联 – 信息互联共享能力,即通过通信与网络技术,实现车辆内部、车辆与车辆、车辆与基础设施、车辆与行人、车辆与云端的信息交互
-
汽车 – 主要以新能源为主
-
补充
二、自动驾驶分级标准:
- ps:智能网联汽车分为智能化分级和网联化分级
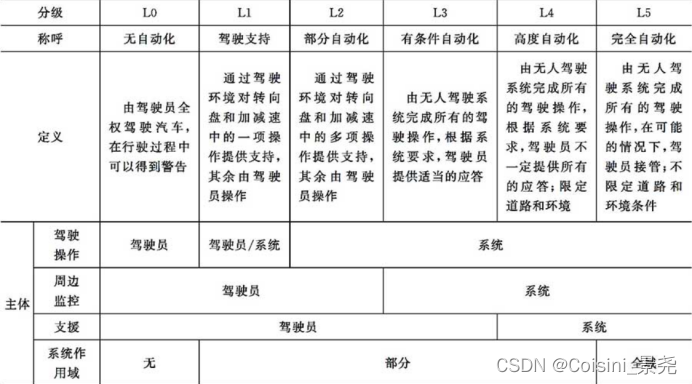
1、SAE智能化分级:
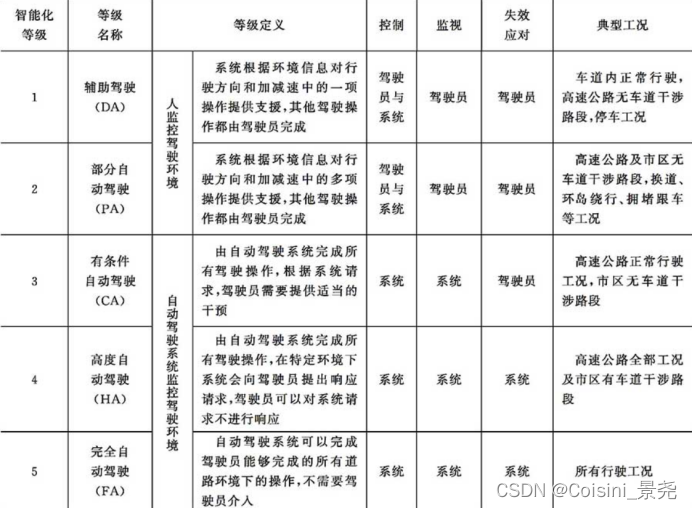
2、中国基于SAE进行智能化分级:
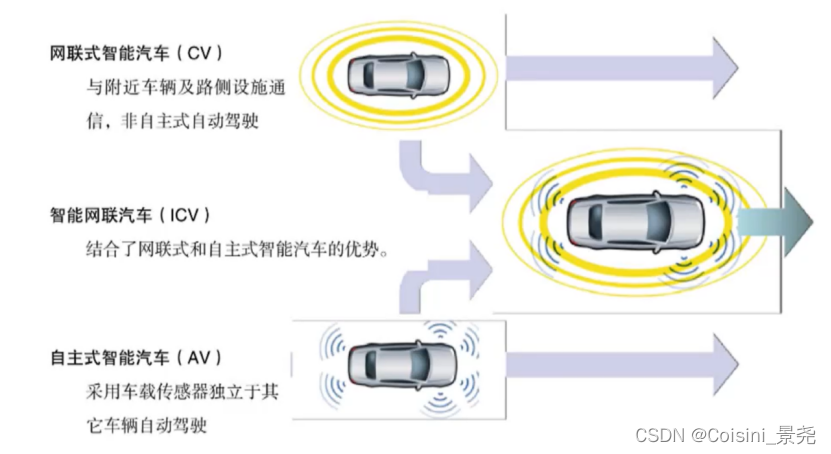
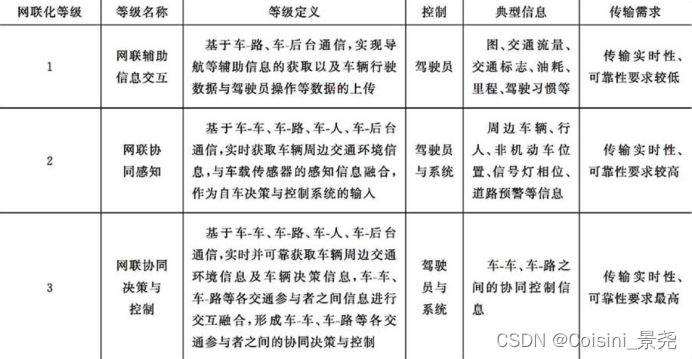
3、网联化分级:
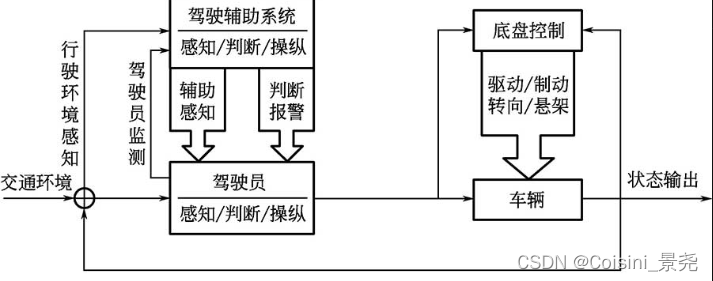
4、结合SAE与驾驶员介入程度分级(控制权):
-
L0:驾驶员拥有全部车辆控制权
-
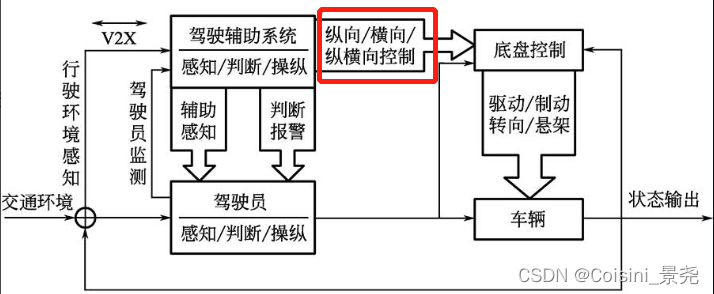
L1-L3:驾驶员拥有部分车辆控制权
-
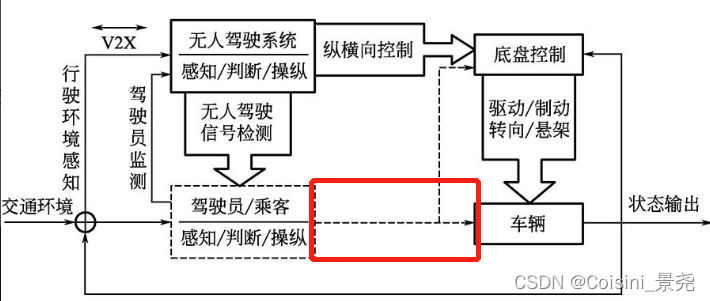
L4-L5:驾驶员不拥有车辆控制权(L4属于部分路况下):
三、智能网联汽车架构:
1、环境感知(认知)层:
-
激光雷达,毫米波雷达,超声波雷达,摄像头,夜视系统 —— 车道线检测,红绿灯/交通标识牌识别,行人/车辆/障碍物检测。
- ps:环境感知需要通过传感器获取大量的周围环境信息,才能保障后续做出相应的规划和决策,
-
GPS,陀螺仪,4G/5G,V2X无线通信技术 —— 车辆定位及通信
- ps:精准定位技术是获取自动驾驶车辆相对于外接环境的精确位置,目前自动驾驶要求的定位精度误差不超过10cm,GPS传感器仅有米级且容易受到隧道遮挡,信号延迟等因素干扰。 目前应对的方法是:融合GNSS全球导航卫星,摄像头,IMU惯性导航和轮速传感器等,通过各传感器之间的相互校准和数据融合来实现精确到车道线的全球实时定位。
2、决策规划层:
- 任务规划 —— 车道保持,换道,跟车,超车,避险避撞等。
- 行为规划 —— 加速,减速,转弯,制动等。
- 路径规划 —— 行驶轨迹
-
ps:决策规划中,首先融合多传感器信息,根据驾驶需求进行任务决策,通过特定的约束条件,规划出两点之间多条可以选择的安全路径,最终选择一条最优的路径,作为车辆行驶轨迹。
-
划分层面分为:
- 全局规划:根据获取的地图信息,规划出一条在特定条件之下的无碰撞最优路径。
- 局部规划:根据全局规划 + 局部环境信息 → 到达目标点
-
决策规划体系结构:
- 分层递进式(串联):上一个模块输出 → 下一个模块输入 → …

- 反应式(并联):控制层都可以直接基于传感器的输入进行决策,因此所产生的动作就是传感数据直接作用的结果,可以突出感知动作的特点,更适用于陌生的环境。
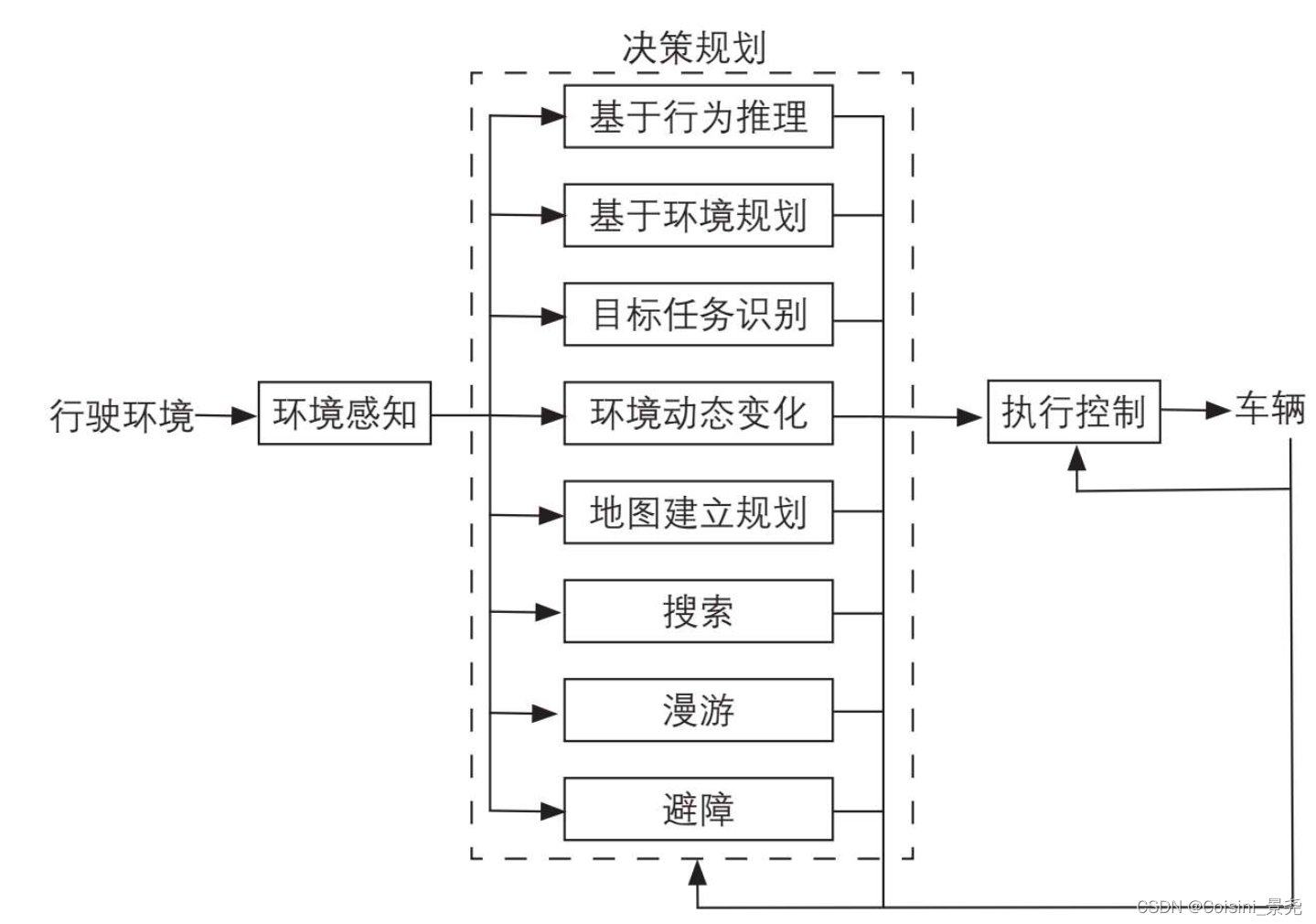 - 分层递进式 + 反应式(混合式体系结构)
- 分层递进式 + 反应式(混合式体系结构)

- 分层递进式(串联):上一个模块输出 → 下一个模块输入 → …
-
3、控制层:
- 纵向控制 —— 车辆的驱动和制动控制
- 横向控制 —— 车辆的转向盘角度调整和轮胎力的控制
4、执行层:
- 通过电机驱动,发动机,传动和制动等系统来执行。
- ps:控制层及执行层则基于车辆动力学系统模型对车辆驱动,制动,转向等进行控制,使车辆跟随所制定的行驶轨迹。

- ps:控制层及执行层则基于车辆动力学系统模型对车辆驱动,制动,转向等进行控制,使车辆跟随所制定的行驶轨迹。
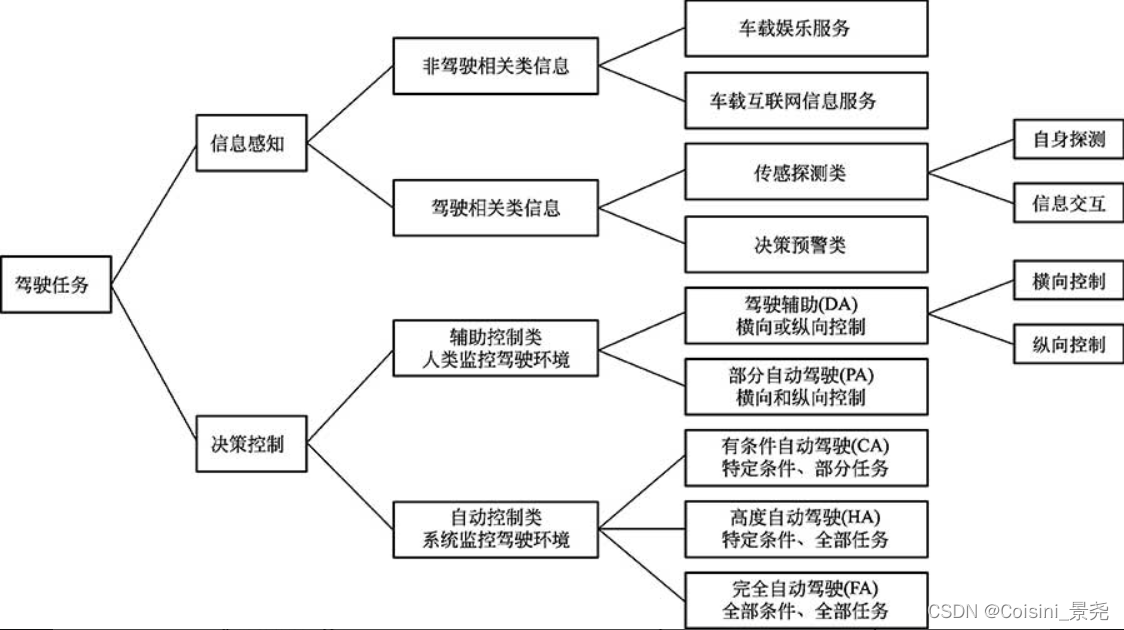
四、智能网联汽车逻辑结构:
- ps:智能网联汽车通过智能化与网联化两条技术路径协同实现 “信息感知” 和 “决策控制” 功能
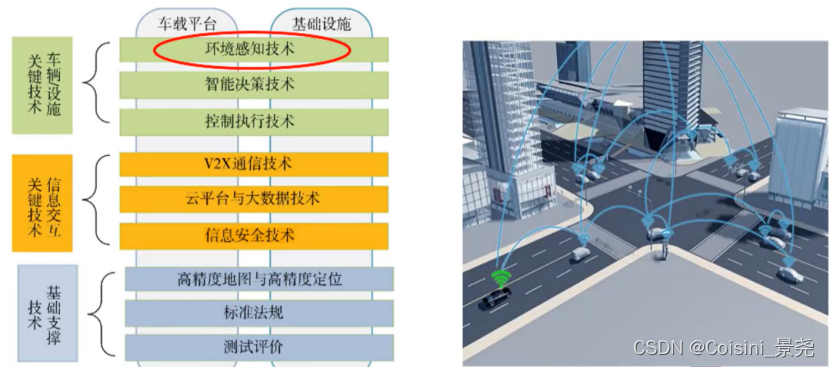
五、智能网联汽车技术结构:
- ps:智能网联汽车可分为 “三横两纵” 结构
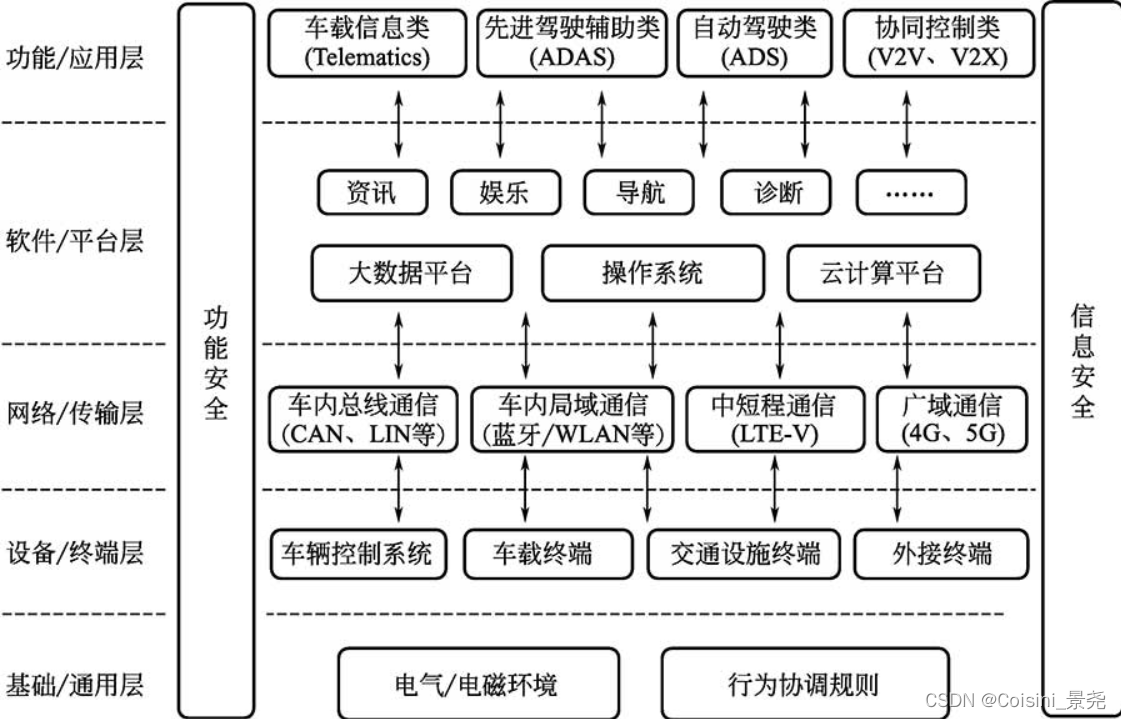
六、智能网联汽车物理结构:
- ps:智能网联汽车把逻辑结构涉及的 “信息感知”, “决策控制” 落实到物理载体上,按照不同用途,通过不同的网络通道,软件,平台对采集/接收到的信息进行传输,处理,执行,从而实现不同的功能或应用
PS1:下一章会详细介绍传感器的概述和基本特性,由浅入深,希望能给您带来帮助
PS2:本专栏持续更新中,感谢关注,写的不对的地方,诚挚欢迎您指正,谢谢


















 1242
1242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











