







一、用到的 ARM 汇编指令
1、跳转指令:
B :跳转指令;
BL: 带返回的跳转指令;
2、数据处理指令
MOV: 数据传送指令;
格式: MOV{条件}{S} 目的寄存器,源操作数
MOV 指令可以完成从另一个寄存器、被移位的寄存器或将一个立即数加载到目的寄存器。其中S 选项决定指令的操作是否影响CPSR中条件标志位的值,当没有S时指令不更新CPSR 中条件标志位的值。
示例:
MOV R1,R0 ;将寄存器R0的值传送到寄存器R1
MOV PC,R14 ;将寄存器R14的值传送到PC,常用于子程序的返回
MOV R1,R0,LSL#3 ;将寄存器R0 的值左移三位后传送到R1
3、加载/存储指令
ARM 微处理器支持加载/存储指令用于在寄存器和存储器之间传送数据,加载指令用于将存储器中的数据传送到寄存器,存储指令则完成相反的操作。
LDR:字数据加载指令

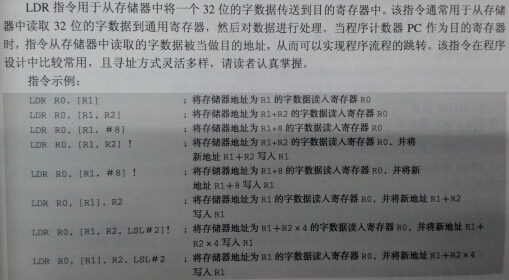
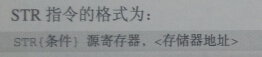
STR 指令:字数据存储指令

二、VI 按键说明
强调:VI 的三种模式只有一般模式可以与编辑、命令行模式切换,编辑模式与命令行模式之间并不能切换的。
1、一般模式可用的按钮:
a、光标移动
常用:
Ctrl + f :屏幕向下移动一页
Ctrl + b: 屏幕向上移动一页
0:移动到这一行的最前面字符处
$:移动到这一行最后面的字符处
G:移动到这个文件的最后一行
gg:移动到这个文件的第一行,相当于1G
b、删除、复制和粘贴
dd:删除光标所在的那一整行
ndd:删除光标所在的向下n 行
d$:删除从光标所在处到该行的最后一个字符
yy:复制光标所在那一行
nyy:复制光标所在的向下n 行
p,P:p为将已复制的数据在光标下一行粘贴,P则为粘贴在光标的上一行
u:复原前一个操作
Ctrl + r:重复上一个操作
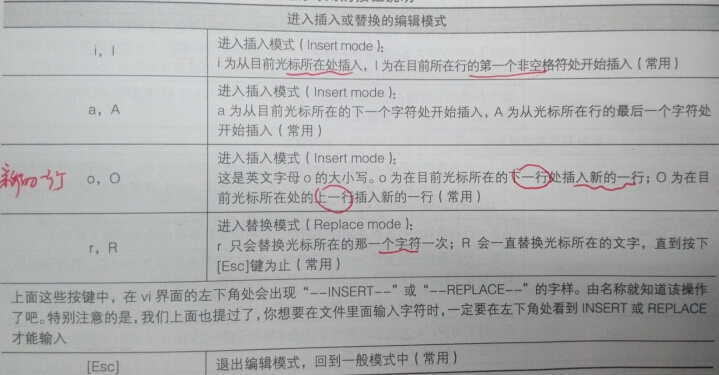
2、一般模式切换到编辑模式的可用按钮说明
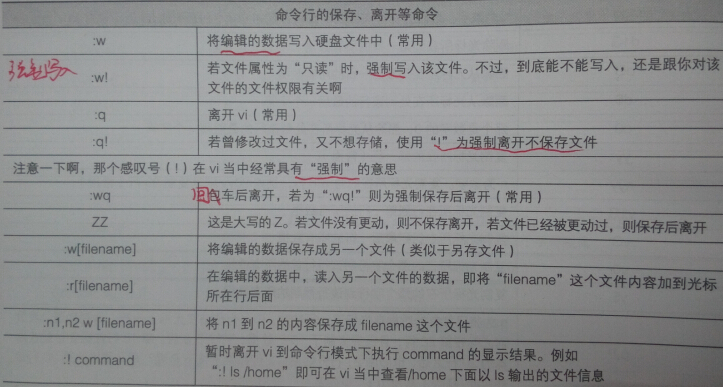
3、一般模式切换到命令行模式的可用的按钮说明
4、vi 环境的更改

【注】知识点很多都是从书上拍的照,在此感谢鸟哥的私房菜还有杨水清老师的开发技术详解!

















 1421
1421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









