







在现代机器人技术的推动下,开发动态步态和高机动性的机器人成为研究前沿。开普敦大学的研究团队推出了创新性的四足机器人——Kemba。Kemba采用了混合电动和气动的设计,展示了其在动态行为和精准控制方面的卓越性能。
机械设计与驱动系统
Kemba的机械设计注重轻量化和高性能。其机身长度为0.5米,重量(不包括支撑臂)约为4.3公斤。机器人采用了两种不同的驱动系统,分别用于髋关节和膝关节。
髋关节:
- 驱动系统:采用了CubeMars的AK系列高扭矩准直接驱动电机(TMotor AK70-10),配有单级10:1行星齿轮减速装置。
- 性能参数:这些电机的峰值输出扭矩为24.8Nm,最大速度为49.7 rad/s,确保了髋关节的高精度运动控制和强劲动力。
膝关节:
- 驱动系统:使用了现成的双作用气动活塞(Festo DNSU-25-70-PPS-A),直径25mm,行程70mm,产生的膝关节峰值扭矩约为18Nm。
- 控制系统:快速切换的两通电磁阀,额定流量为200L/min,保证了气动驱动器的快速响应和稳定控制。
Kemba还配备了一个2.5米长的支撑臂,限制了3个自由度的运动,并提供位置、速度和加速度的状态信息,以支持精确的运动控制。
控制与优化
Kemba的控制系统在高级运动规划阶段结合了气动驱动器的动力学,以生成可行的运动轨迹。轨迹跟踪使用了比例-微分(PD)控制器,与髋关节电机的前馈扭矩和膝关节活塞的阀门命令相结合,实现了高效的运动控制。
轨迹优化:
- 使用Python库Pyomo和NLP求解器IPOPT来解决优化问题。整个优化问题包含8982个变量,在2核笔记本电脑上大约需要55秒解决。
- 优化后的轨迹不仅考虑了机器人的整体动力学,还细化到了各个驱动器的动力学特性,确保了运动的流畅性和精准性。
卓越的性能
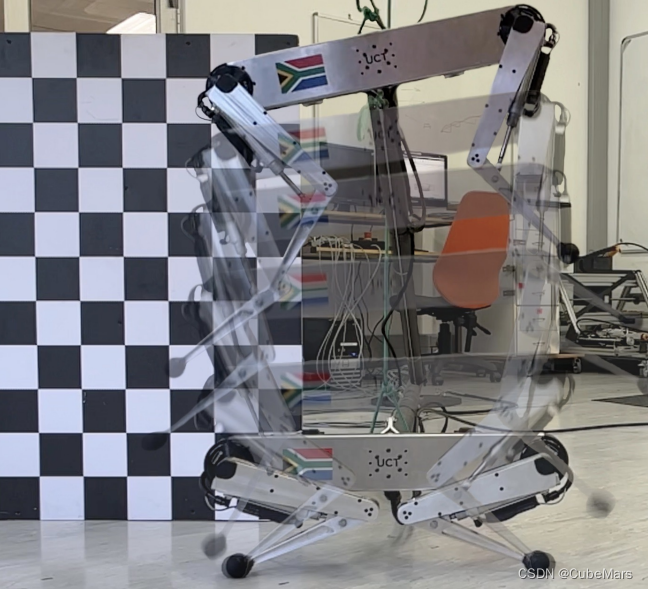
Kemba展示了其在执行复杂动态任务中的卓越性能。例如,它能够实现0.5米的跳跃和最大1米的跳跃,相当于其腿长的约2.2倍。即使在没有对气动关节进行反馈的情况下,Kemba仍能够匹配预期的轨迹,高度误差仅为5厘米。这一表现验证了模型在高级运动生成中的实用性,以及机器人硬件的强大能力。
CubeMars AK系列电机的贡献

Kemba的成功离不开其高性能驱动系统,尤其是CubeMars的AK系列电机。这些电机在制造工艺上,将背隙控制在9弧分以内,保证了电机在各种挑战性环境下的稳定运行和卓越的动力性能。这种高精度的控制对于Kemba在执行快速加速和高精度任务时至关重要。
结论
Kemba作为开普敦大学研究团队的创新成果,展示了其在动态行为和精准控制方面的卓越性能。其混合电动和气动的设计,以及CubeMars AK系列电机的应用,使得Kemba在机器人技术的前沿研究中占据了一席之地。Kemba不仅为未来的机器人研究提供了重要的平台,还启示了运动机器人设计的新思路,推动了这一领域的发展。
通过Kemba的开发和测试,研究团队展示了如何在实际应用中平衡动力和精度,提供了宝贵的经验和技术参考。这一创新性的四足机器人不仅在科研中具有重要意义,还为未来的实际应用提供了广阔的前景。















 396
396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









