






在工程中,有时候很难直接测量机械设备部件的速度或位移,特别是在运动着的设备上。即使在一般的场景下可以布置速度传感器,但是有时候需要同时监测速度和加速度,为了节约成本,往往通过将加速度信号直接进行积分得到速度信号。
将加速度信号积分得到速度信号有两种方法,一是直接在时域进行积分,这往往会产生趋势项,积分的结果需要进行去趋势处理。二是在频域进行积分,典型的频域积分算法是omega算法,这里做一下简单的介绍:
如果我们已经获得了加速度信号x''(t) , 其傅里叶变换为X''(f), 那么有:
记速度信号为x'(t),这是我们所要求的,设其傅里叶变换为X'(f), 则有:
因为加速度可以由速度求导得到,所以他们之间的关系是:
把速度的表达式带入上式,有:
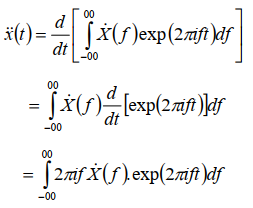
比较上式与第一个式子,可以得出:
因为时域加速度信号是传感器获取到的,可以通过计算得到其频域表示,进而通过计算得到速度的频域表示,即为:

因此再通过傅里叶逆变换就可以得到速度的时域波形。这里要注意的是,在计算速度的频域表示时,在f=0时刻,上述公式无法计算,因此直接令X'(0) = 0 + 0j ,这样得到的速度信号没有了直流值,因此无需去趋势就可以得到想要的速度波形。下面附上我在matlab上通过时域积分(最小二乘算法去趋势后)和频域积分方法得到的速度波形:
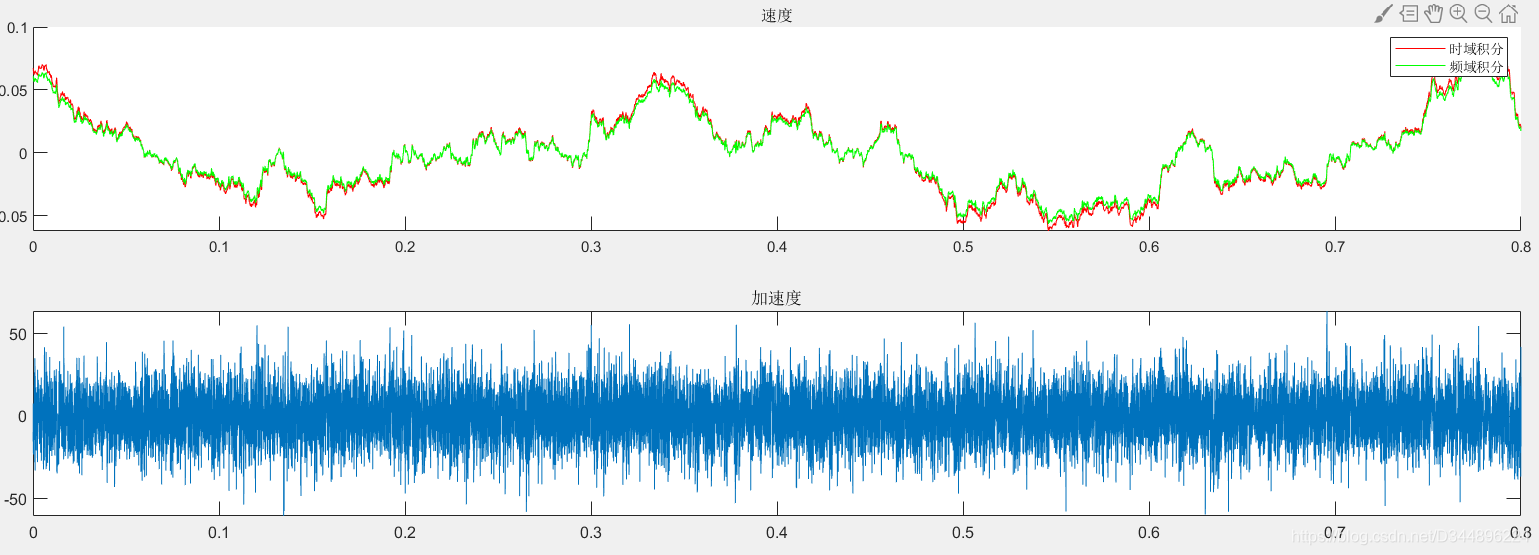
可以看到,基本上是一致的。
注:源代码有偿获取。

















 3719
3719

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









