







一、简介
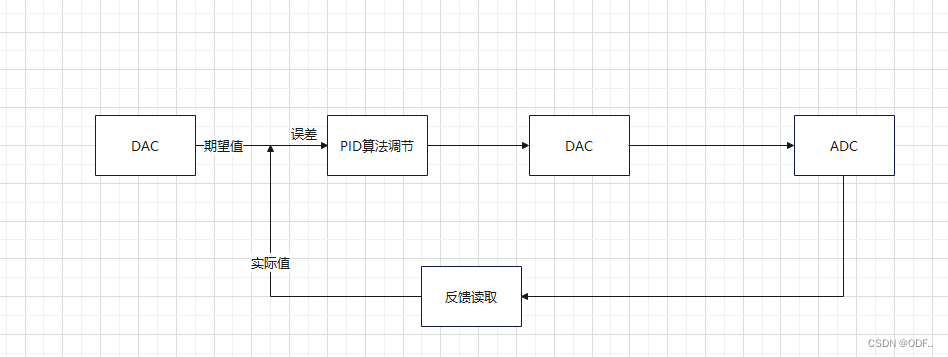
关于PID调节的这里不做详解,就简单说下,其实就是先设定好一个期望,通过反馈系统返回输出值,然后判断这个输出实际输出的值,和我们的期望值的误差,然后PID算法根据这个误差,去调整我们的输出值,直到输出达到我们的期望值。
那么我们为啥需要我们需要用PID去调整输出值呢,不能直接就设定一直输出期望值吗,这里就要说一下,以我们使用的STM32为例,我们要控制输出电压是利用DAC输出一个数字信号,但是有时候外界会出现一些误差,如噪声啊,甚至说打雷,漏电了,这些都可能让我们的输出值受到影响,因此这里就到我们的PID出马了,去不断的通过反馈系统去判断,然后根据误差去调输出值,让我们快速且平稳的达到我们要的输出值。
比如设定目标电压值为1.65V,目标无非是希望其能够快速而且没有抖动的达到1.65V。
二、工程创建
1、芯片选择
芯片:STM32F103RCT6(根据自己的板子来进行选择)
2、设置RCC
设置高速外部时钟HSE 选择外部时钟源

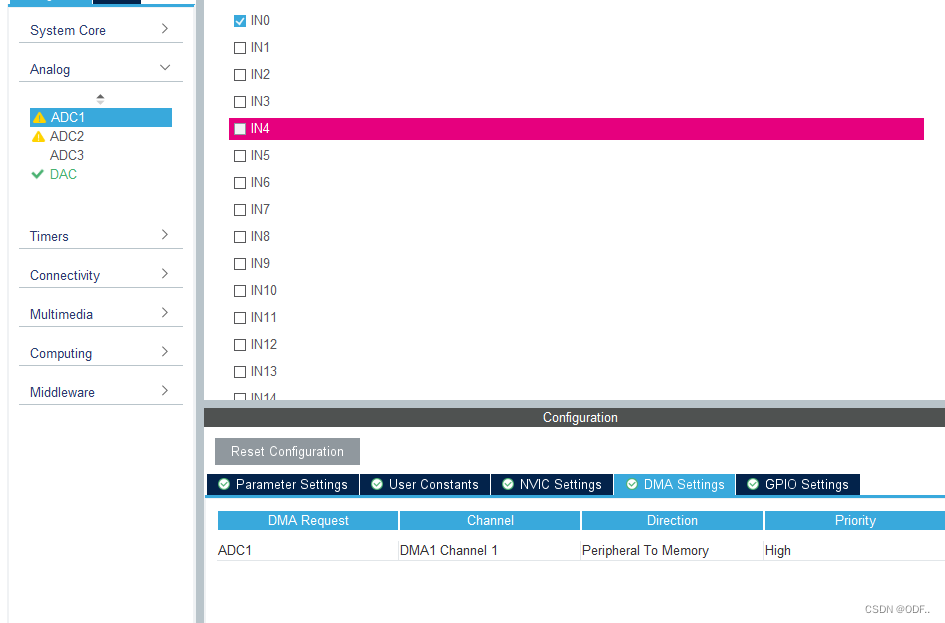
3、设置ADC引脚
ADC1通道0即PA0,开启连续转换模式,转换周期:55.5Cycles

4、ADC利用DMA传输
设置DMA传输模式:循环传输(有数据就传输),同时设置高优先级
5、开启DAC输出

6、开启USART1
设置异步通信,波特率115200Bits/s

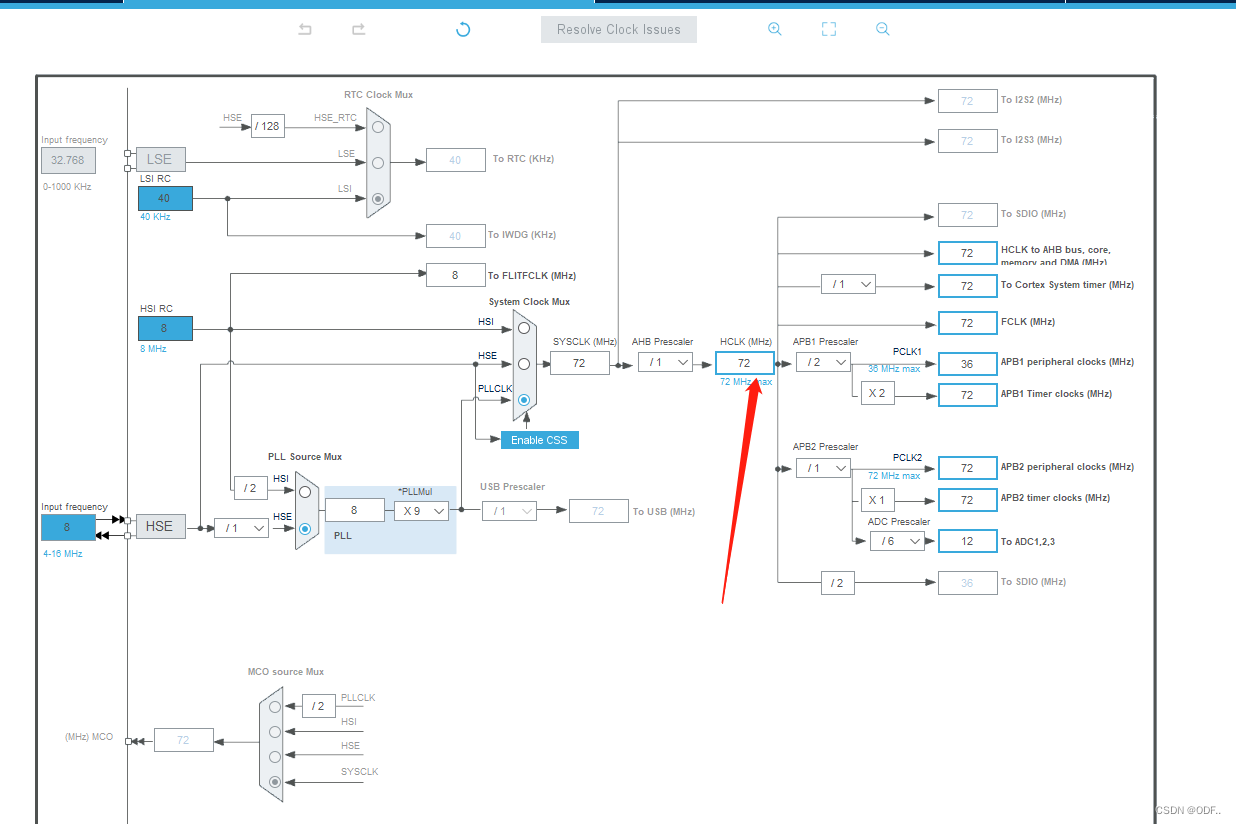
7、配置时钟
F1系列芯片系统时钟为72MHzs
三、实验代码
首先编写pid.c与pid.h文件代码,这里编写的是pid位置式算法。
(1)pid.h
#ifndef __PID_H__
#define __PID_H__
#include "main.h"
typedef struct
{
float SetVoltage; //定义设定值
float ActualVoltage; //定义实际值
float err; //定义偏差值
float err_last; //定义上一个偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
float result; //pid计算结果
float voltage; //定义电压值(控制执行器的变量)0-5v右转 5-10v左转
float integral; //定义积分值
}pid_p;
void PID_init( void);
float PID_realize( float v, float v_r);
#endif
(2)pid.c
#include "pid.h"
#include "stdio.h"
pid_p pid;
//pid位置式
void PID_init()
{
printf("PID_init begin \n");
pid.SetVoltage= 0.0; // 设定的预期电压值
pid.ActualVoltage= 0.0; // adc实际电压值
pid.err= 0.0; // 当前次实际与理想的偏差
pid.err_last=0.0; // 上一次的偏差
pid.voltage= 0.0; // 控制电压值
pid.integral= 0.0; // 积分值
pid.Kp= 0.2; // 比例系数
pid.Ki= 0.15; // 积分系数
pid.Kd= 0.2; // 微分系数
printf("PID_init end \n");
}
float PID_realize( float v, float v_r)
{
pid.SetVoltage = v; // 固定电压值传入
pid.ActualVoltage = v_r; // 实际电压传入 = ADC_Value * 3.3f/ 4096
pid.err = pid.SetVoltage - pid.ActualVoltage; //计算偏差
pid.integral += pid.err; //积分求和
pid.result = pid.Kp * pid.err + pid.Ki * pid.integral + pid.Kd * ( pid.err - pid.err_last);//位置式公式
pid.err_last = pid.err; //留住上一次误差
return pid.result;
}
(3)在main.c加上:
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "pid.h"
/* USER CODE END Includes */
/* USER CODE BEGIN PV */
uint16_t ADC_DMA_Value[ADC_Channel_MAX]; // DMA得到ADC的值
uint16_t ADC_Value = 0;
uint16_t DAC_Value = 100;
/* USER CODE END PV */
/* USER CODE BEGIN PD */
#define ADC_Channel_MAX 2
/* USER CODE END PD */
/* USER CODE BEGIN 0 */
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
/* USER CODE END 0 */
(4)在ADC初始化之后加上AD校准函数:
/* USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1); // f1系列需要ADC校准,f4不需要
HAL_ADC_Start_DMA(&hadc1,(uint32_t *)&ADC_DMA_Value,ADC_Channel_MAX); // 启动ADC的DMA转换
PID_init();
/* USER CODE END 2 */
(5)while中加上:
HAL_DAC_SetValue(&hdac, DAC_CHANNEL_1, DAC_ALIGN_12B_R, DAC_Value); // 设置DAC数值
HAL_DAC_Start(&hdac,DAC_CHANNEL_1); // 开启DAC输出
ADC_Value = ADC_DMA_Value[0];
printf("%0.2f\r\n", ADC_Value*3.3/4096);
// 这里设置输出1.65V
DAC_Value = DAC_Value + PID_realize(2048, ADC_Value);
HAL_Delay(100);
用一根杜邦线连接PA0(ADC1_IN0)与PA4(DAC),然后串口连接电脑(我这里利用USB转TLL连接电脑,RX接PA9(USART1_TX),TX接PA10(USART1_RX))之后就可以完成正常读取,刚打开串口时: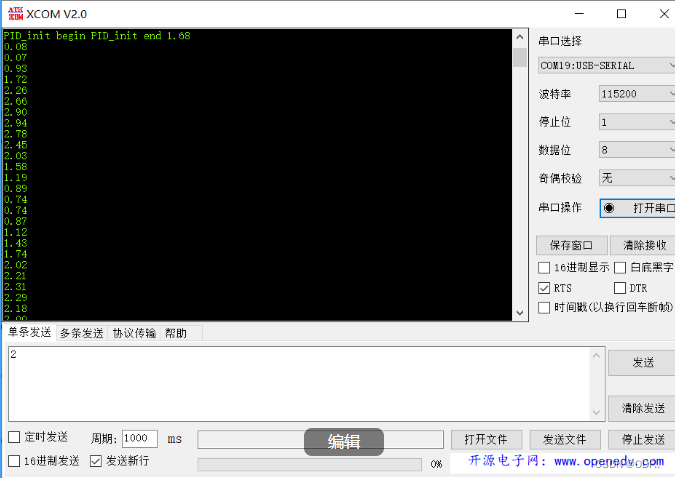















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









