







一、前言
最近因为需要读取传感器数据,需要单片机发送命令,传感器返回24位数据,因为使用SPI传输数据,虽然命令只有8位,但是必须发送24位数据才能获得传感器的24位数据。关于SPI的知识可以查看如下的这篇文章:
自己在这里困了很久,所以写这篇文章记录一下,也给后面需要的朋友一点帮助。
我的目的就是消除或者减小每帧数据之间的发送间隔。
二、GPIO配置
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能AHB时钟 */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
/*定义 SPI复用引脚 */
GPIO_InitStructure.GPIO_Pin = PIN_SPI_SCK | PIN_SPI_MISO |
PIN_SPI_MOSI;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(PORT_SPI_SCK, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_0);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_0);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource5, GPIO_AF_0);
/* 片选CS */
GPIO_InitStructure.GPIO_Pin = PIN_SPI_CS;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(PORT_SPI_CS, &GPIO_InitStructure);
三、SPI配置
/* SPI 初始化定义 */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主 SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI发送接收 8 位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟悬空低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //软件控制 NSS 信号
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //波特率预分频值为8
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从 MSB 位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //定义了用于 CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure);
SPI_RxFIFOThresholdConfig(SPI1, SPI_RxFIFOThreshold_QF);
SPI_Cmd(SPI1, ENABLE);
此处有一点需要注意哦,STM32F0区别于STM32F1系列,SPI初始化后需要初始化RxFIFO:SPI_RxFIFOThresholdConfig(SPI1, SPI_RxFIFOThreshold_QF);
至于结构体参数的初始化参数,根据自己项目改。我里使用的是内部晶振超频56M,8分频获取7M的SPI时钟。(为了获取最大传输速度,别问为什么,就是需要这么干,之前在群里讨论我的时钟速度为什么上不去,结果很多人问我为什么要那么高的时钟,追求速度?什么东西要那么高的速度?。。。。。。。。我。。。。对了,顺便说一下遇到的坑,我有示波器和逻辑分析仪,我一直用逻辑分析仪,时钟怎么都上不去,一直是2M,真的是找遍了原因,最后是逻辑分析仪的速度设低了,让你手贱!让你手贱!!)
四、SPI发送接收(非DMA)
uint32_t SPI_WriteRead(void)
{
uint16_t num1,num2,num3;
uint32_t AngelData;
GPIO_ResetBits(GPIOA, GPIO_Pin_15);//拉低片选
*((uint8_t*)&(SPI1->DR) + 1 ) = 0x3F;//发送指令
num1 = SPI1->DR; //读SPI
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);
*((uint8_t*)&(SPI1->DR) + 1 ) = 0xFF;//发送无关数据,为了获取返回数据
num2 = SPI1->DR;//读SPI
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);
*((uint8_t*)&(SPI1->DR) + 1 ) = 0xFF;//发送无关数据,为了获取返回数据
num3 = SPI1->DR;//读SPI
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);
GPIO_SetBits(GPIOA, GPIO_Pin_15);//拉高片选
AngelData = ((num2&0xFF)<<16 |(num3&0xFF)<<8 | (num1&0xFF));
return AngelData ;
}
说一下注意的点,STM32F0慎用while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE) == RESET);判断数据接收完整,非常容易卡死在这里面,可以使用忙标志判断,很好用,不然会提前拉高片选信号,导致数据不完整。

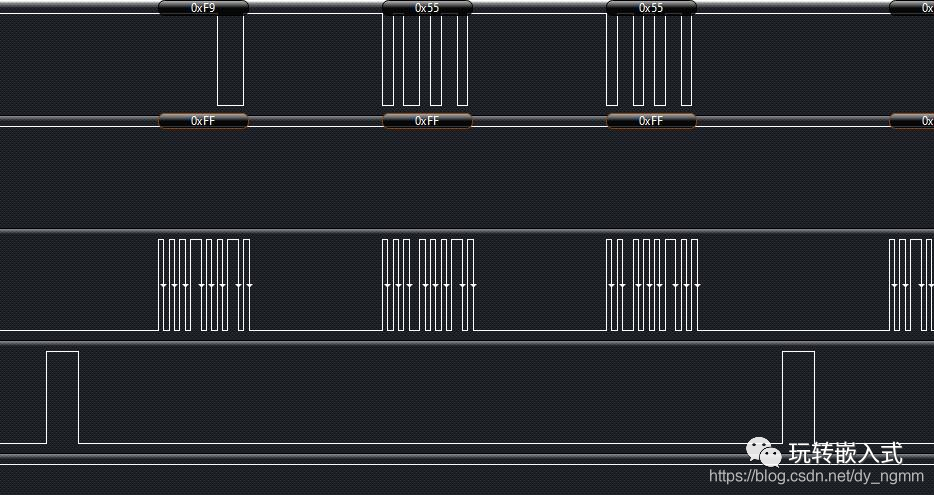
如图,我发送24位数据,时钟却输出很多。因为DR寄存器是16位的,如果你直接SPI1->DR = 0xFF ; 这样的操作是不正确的,你的数据会变成0x00FF之后赋值给DR寄存器,也就是操作了16位,所以STM32会输出16个时钟脉冲
解决方法:
我们先找到DR寄存器的地址,再用一个八位的指针指向这个地址,现在指向的是DR寄存器的开头,那么指针+1,指针指向了DR寄存器的低八位这时候给指针指向的地址赋值0xFF,那么这个字节就会放入DR低八位的空间内,而不是操作整个16位DR寄存器,
((uint8_t)&(SPI1->DR) + 1 ) = 0xFF;
经过上面的代码就已经可以获得24位数据,时钟也会连续,不会出现上面两张图片的问题,后面贴上DMA的代码。
五、SPI DMA配置
void MYDMA_TX_Config(DMA_Channel_TypeDef* DMA_CHx,uint32_t cpar,uint32_t cmar,uint16_t cndtr)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //使能DMA传输
DMA_DeInit(DMA_CHx); //将DMA的通道3寄存器重设为缺省值
DMA1_MEM_LEN=cndtr;
DMA_InitStructure.DMA_PeripheralBaseAddr = cpar; //DMA外设基地址
DMA_InitStructure.DMA_MemoryBaseAddr = cmar; //DMA内存基地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; //数据传输方向,从内存读取发送到外设
DMA_InitStructure.DMA_BufferSize = cndtr; //DMA通道的DMA缓存的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //工作在正常缓存模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //DMA通道 x拥有中优先级
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x没有设置为内存到内存传输
DMA_Init(DMA_CHx, &DMA_InitStructure); //根据DMA_InitStruct中指定的参数初始化DMA的通道SPI_Tx_DMA_Channel所标识的寄存器
}
//开启一次DMA传输
void MYDMA_TX_Enable(DMA_Channel_TypeDef*DMA_CHx)
{
DMA_Cmd(DMA_CHx, DISABLE ); //关闭SPI TX DMA1 所指示的通道
DMA_SetCurrDataCounter(DMA_CHx,DMA1_MEM_LEN);//DMA通道的DMA缓存的大小
DMA_Cmd(DMA_CHx, ENABLE); //使能SPI TX DMA1 所指示的通道
}
void MYDMA_RX_Confog(DMA_Channel_TypeDef* DMA_CHx,uint32_t cpar,uint32_t cmar,uint16_t cndtr)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //使能DMA传输
DMA_DeInit(DMA_CHx); //将DMA的通道2寄存器重设为缺省值
DMA1_MEM_LEN=cndtr;
DMA_InitStructure.DMA_PeripheralBaseAddr = cpar; //DMA外设基地址
DMA_InitStructure.DMA_MemoryBaseAddr = cmar; //DMA内存基地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //数据传输方向,从外设到内存
DMA_InitStructure.DMA_BufferSize = cndtr; //DMA通道的DMA缓存的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //数据宽度为8位
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //工作在正常缓存模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //DMA通道 x拥有中优先级
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x没有设置为内存到内存传输
DMA_Init(DMA_CHx, &DMA_InitStructure); //根据DMA_InitStruct中指定的参数初始化DMA的通道USART1_Tx_DMA_Channel所标识的寄存器
DMA_Cmd(DMA1_Channel2, ENABLE); //使能USART1 TX DMA1 所指示的通道
}
//开启一次DMA传输
void MYDMA_RX_Enable(DMA_Channel_TypeDef*DMA_CHx)
{
DMA_Cmd(DMA_CHx, DISABLE ); //关闭SPI RX DMA1 所指示的通道
DMA_SetCurrDataCounter(DMA_CHx,DMA1_MEM_LEN);//DMA通道的DMA缓存的大小
DMA_Cmd(DMA_CHx, ENABLE); //使能SPI RX DMA1 所指示的通道
}
六、SPI发送接收(DMA模式)
void SPI_DMA_WriteReadByte(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_15);//拉低片选 (放在此处为了节省0.5us的时间)
SPI_I2S_DMACmd(SPI1,SPI_I2S_DMAReq_Tx, ENABLE);//SPI 发送DMA使能
SPI_I2S_DMACmd(SPI1,SPI_I2S_DMAReq_Rx, ENABLE);//SPI 接收DMA使能
MYDMA_TX_Enable(DMA1_Channel3); //发送
MYDMA_RX_Enable(DMA1_Channel2);//接收
if(DMA_GetFlagStatus(DMA1_FLAG_TC3) == RESET)
{
DMA_ClearFlag(DMA1_FLAG_TC3);
}
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == 1); //保证发送接收数据完整
GPIO_SetBits(GPIOA, GPIO_Pin_15);//拉低片选
}


4.Segger Embedded Studio,试试这个新嵌入式编译器环境!

免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。














 1137
1137











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









