







目录
使用PID Tuner对simulink里的PID控制器进行调参
已知数学模型为
一、在matlab(r2018a)中导入已知的数学模型
在matlab命令行输入代码,将模型导入matlab中
num=4;
>> den=[100 1];
>> dt=20;
>> g=tf(num,den,'inputdelay',dt)二、打开PID Tuner模型的命令:
open_system('scdspeedctrlpidblock')双击PID模块,controller:选择PID后,点击Tune
或者在此选择PID Tuner
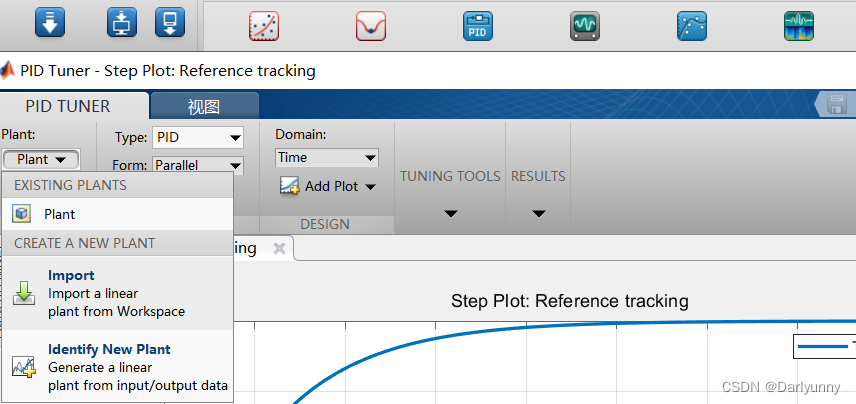
三、将数学模型导入到PID Tuner中
type选择pid,普plant选择import,将刚才的数学模型g导入,既能出现PID参数整定图像
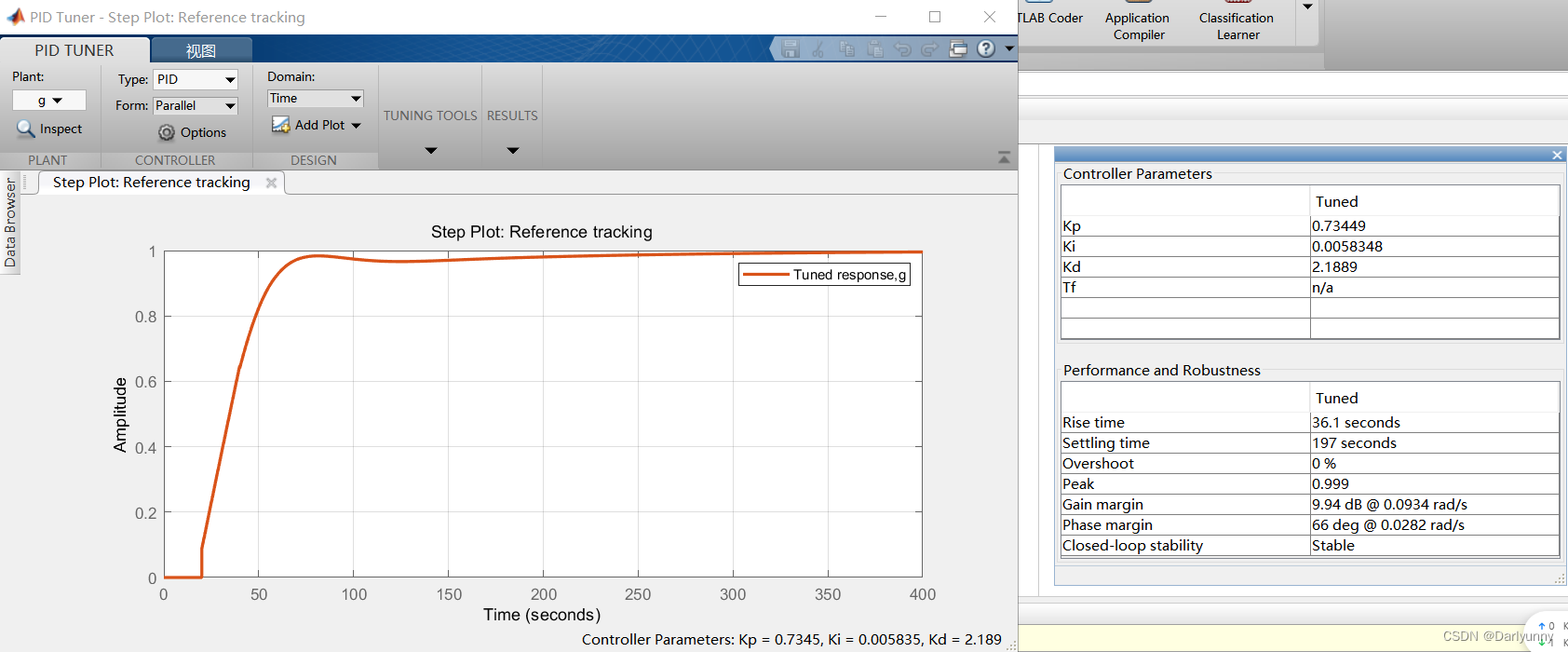
根据观测图线,调整TUNING TOOLS里的响应时间和瞬态响应,要满足系统的上升时间、过渡时间、稳态误差、超调量,得出KP,KI,KD参数及其系统参数。















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









