







 本文详细介绍了如何使用MATLAB的ControlSystemTuner工具箱在SIMULINK中进行PID控制器的自动整定。通过建立仿真模型,设置输入输出,利用工具箱进行自适应调节,最终实现满足要求的系统响应。该方法简化了工程中手动调参的复杂过程。
本文详细介绍了如何使用MATLAB的ControlSystemTuner工具箱在SIMULINK中进行PID控制器的自动整定。通过建立仿真模型,设置输入输出,利用工具箱进行自适应调节,最终实现满足要求的系统响应。该方法简化了工程中手动调参的复杂过程。
目录
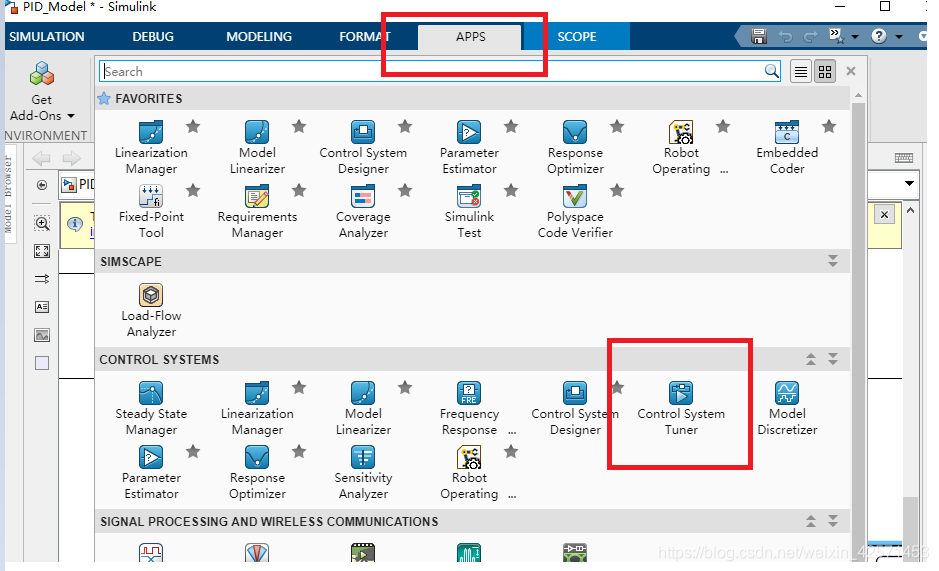
① 选择顶层菜单栏的APP->Control System Tuner
④ 单击TUNING --> Tracking of step commands
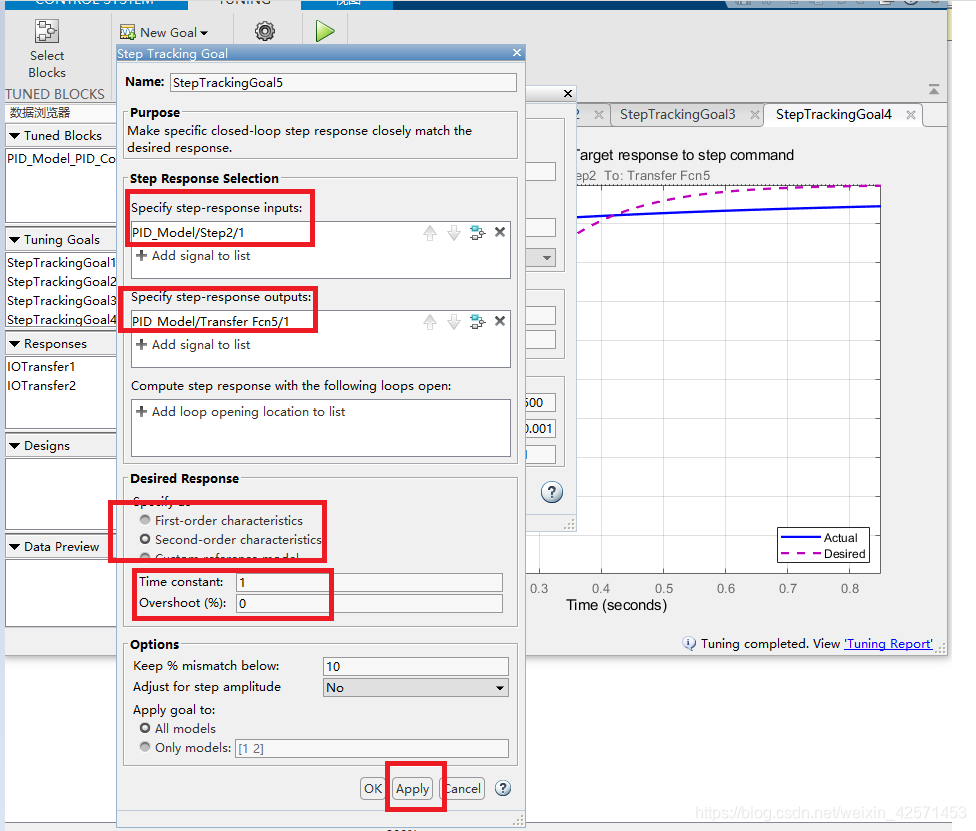
④ 添加输入输出,设置调节时间和超调量,然后单击Plot即可。其中紫线是期望曲线,蓝线是当前实际得到的曲线(还没有自动调节 )
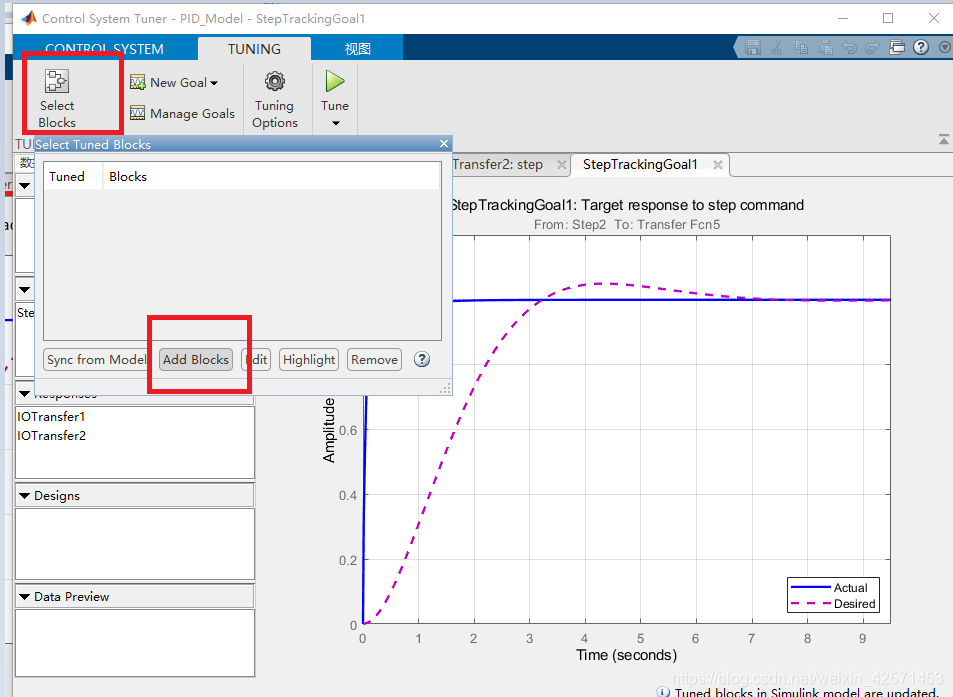
⑤ 单击Select Blocks --> Add Blocks,选择自己的PID模块
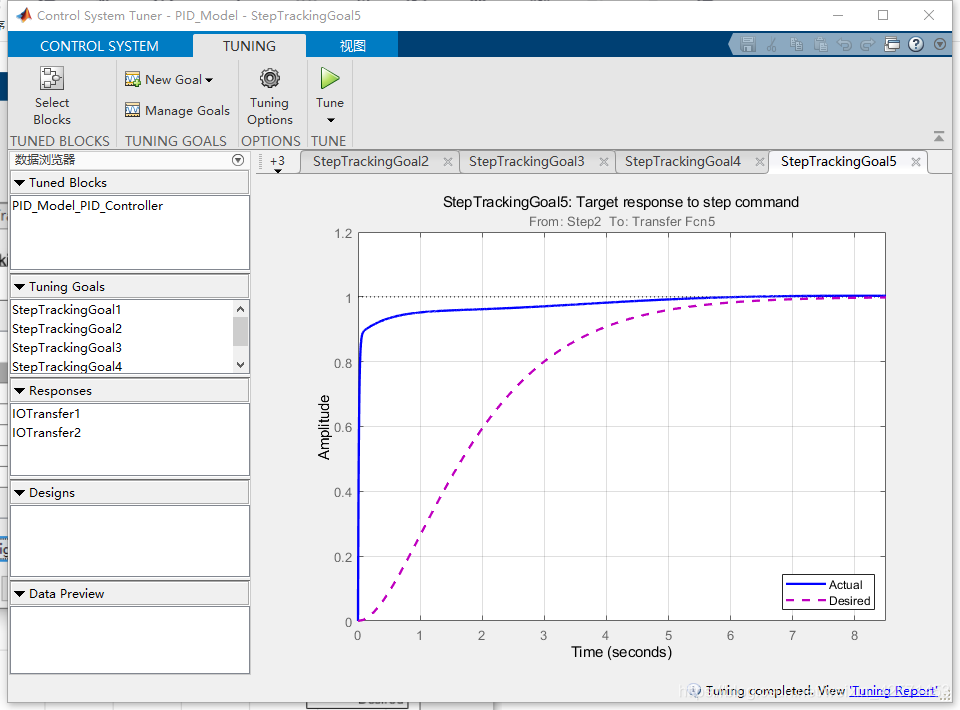
⑥ 单击 绿色的Tune,即开始自整定,得到满足要求的蓝色曲线
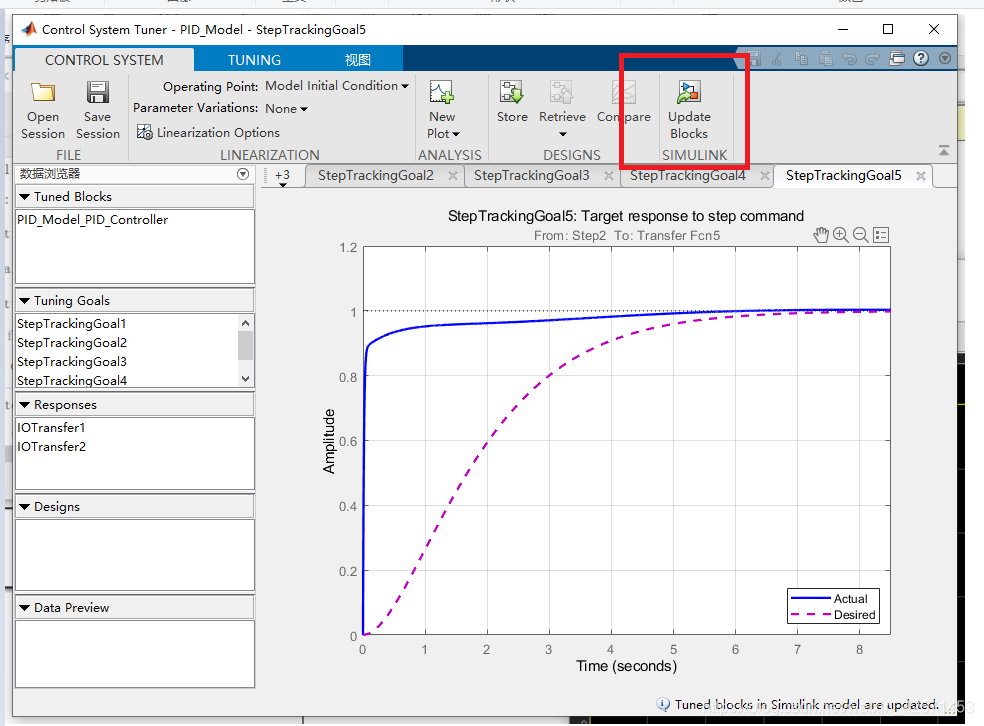
⑦ 单击Update Blocks即把调节好的PID参数,更新到SIMULINK之中
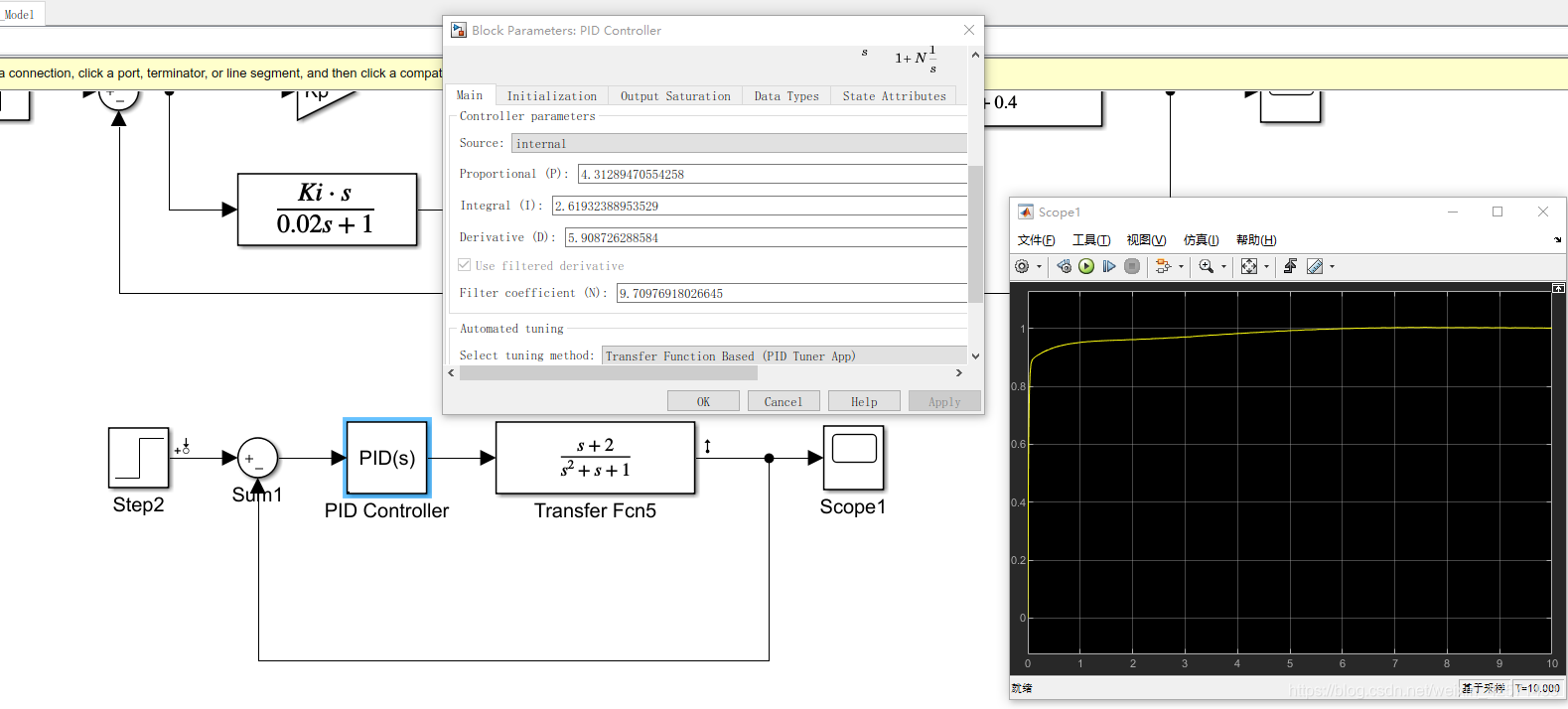
⑧ 可以看到PID模块的参数自动更新了,同时相应曲线,也是刚刚根据自己要求整定得到的曲线
一、背景
很多时候,工程上自己调PID太麻烦,并且不需要解释原理,所以利用MATLAB强大的工具箱自动整定PID能够给我们带来很多方便。
二、工具
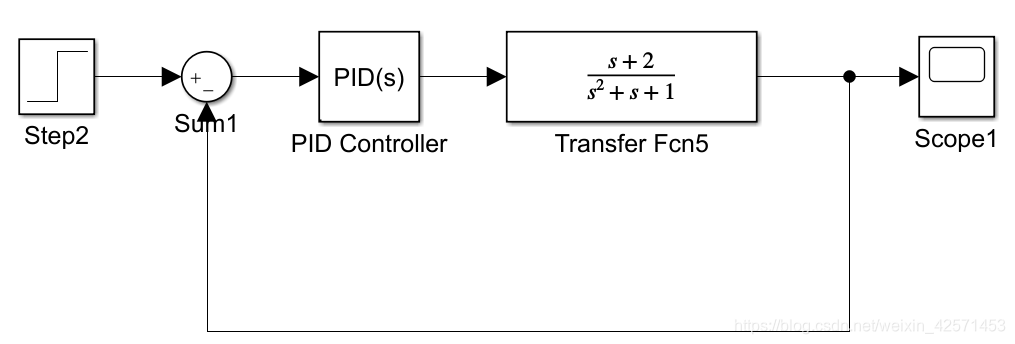
①SIMULINK模型
②MATLAB工具箱(我的版本2020a):Control System Tuner
(老版本simulink打开control system tuner的方式为 analysis→control design→control system tuner)
三、实例
(1) 在SIMULINK中的操作
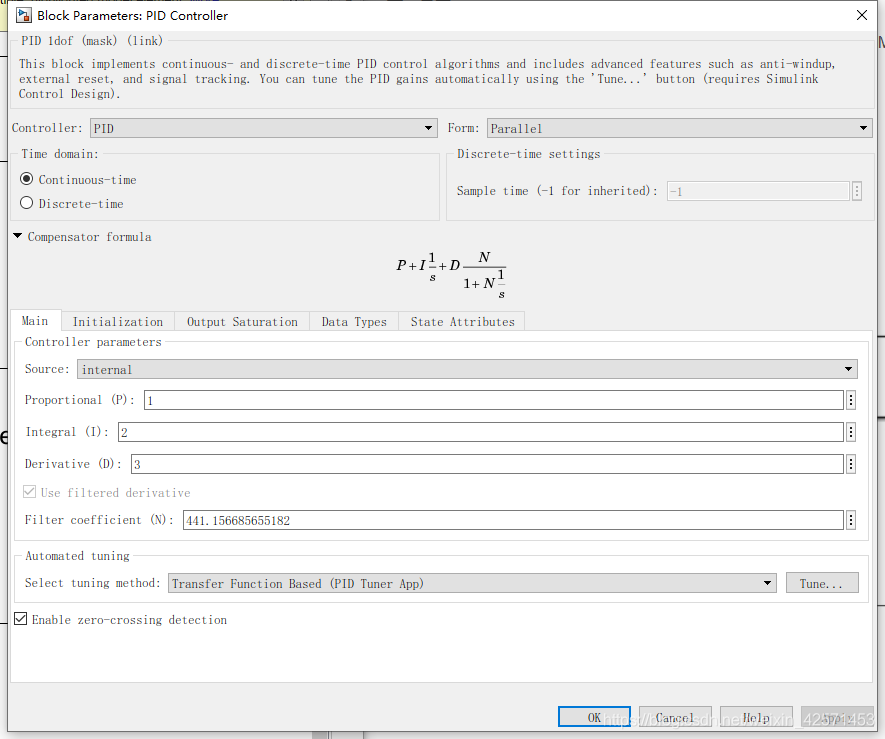
① 在SIMULNK建立仿真模型,PID随意设置参数
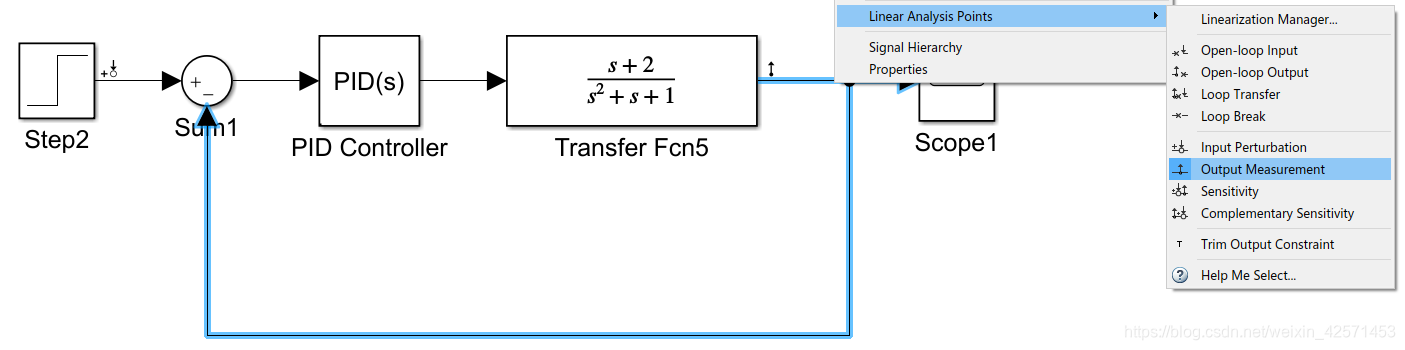
② 设置待自适应调节PID的SIMULINK仿真的输入输出
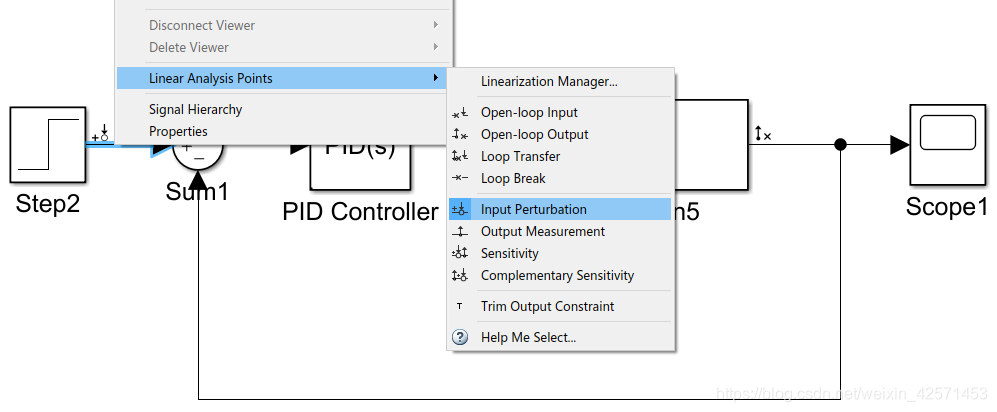
在给定处,鼠标左键连接线,然后右键,在菜单中选择Linear Analysis Points -->Input Perturbation;同样的,给输出选择Output Measurement
(2) 在MATLAB工具箱中的操作
① 选择顶层菜单栏的APPS->Control System Tuner(SIMULINK界面打开 不是MATLAB界面)
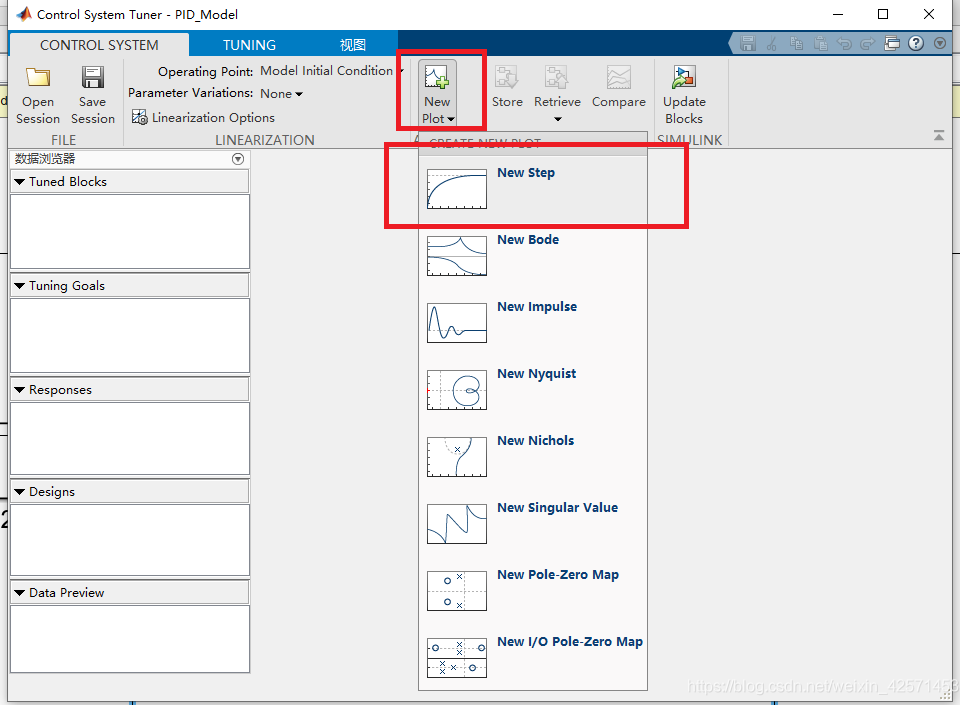
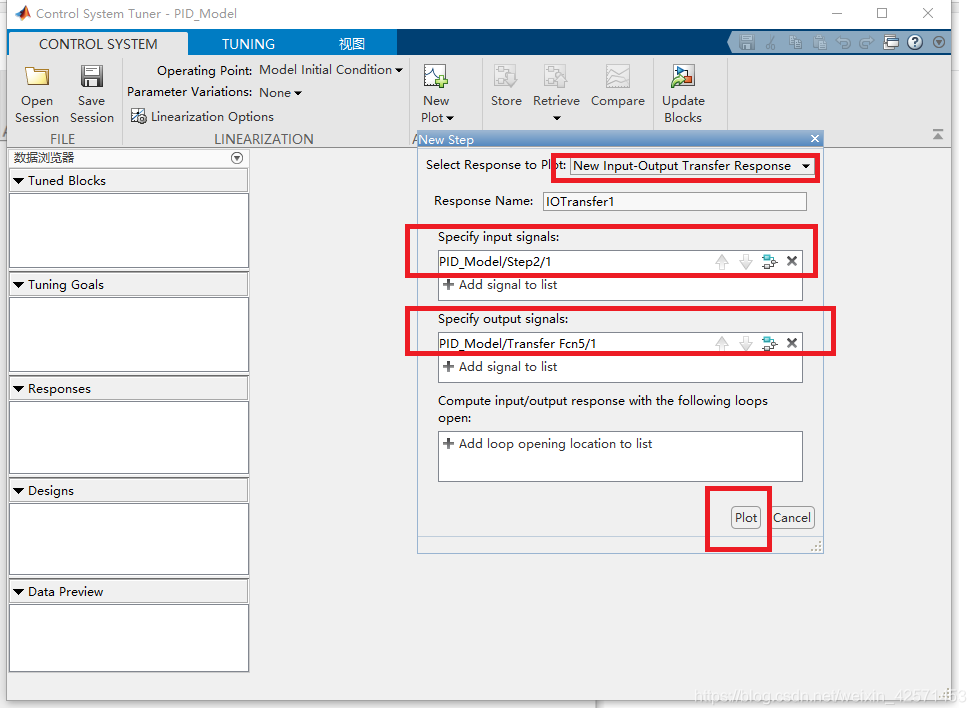
② 选择New Plot --> New Step
③ 设置输入输出为自己在(1)②所定义的
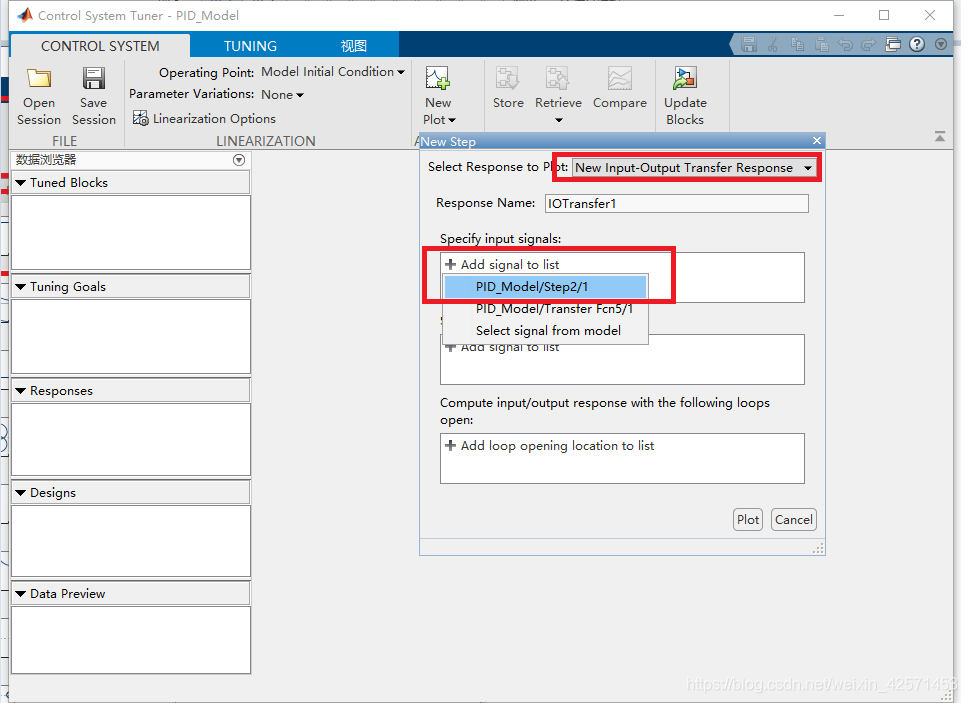
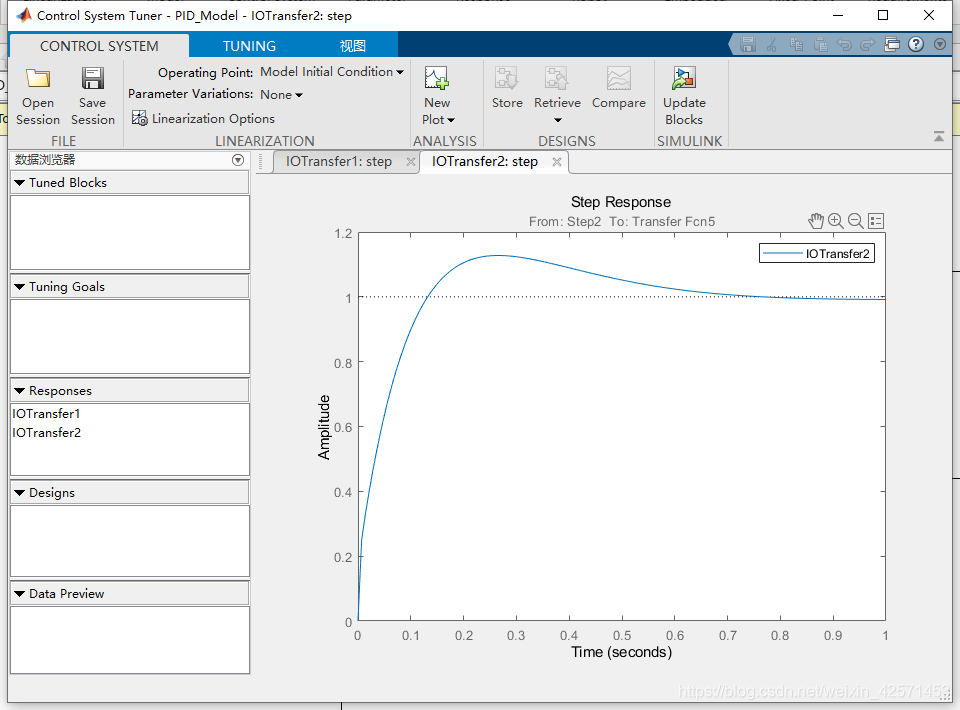
④ 单击Plot能够看到目前模型参数的响应曲线
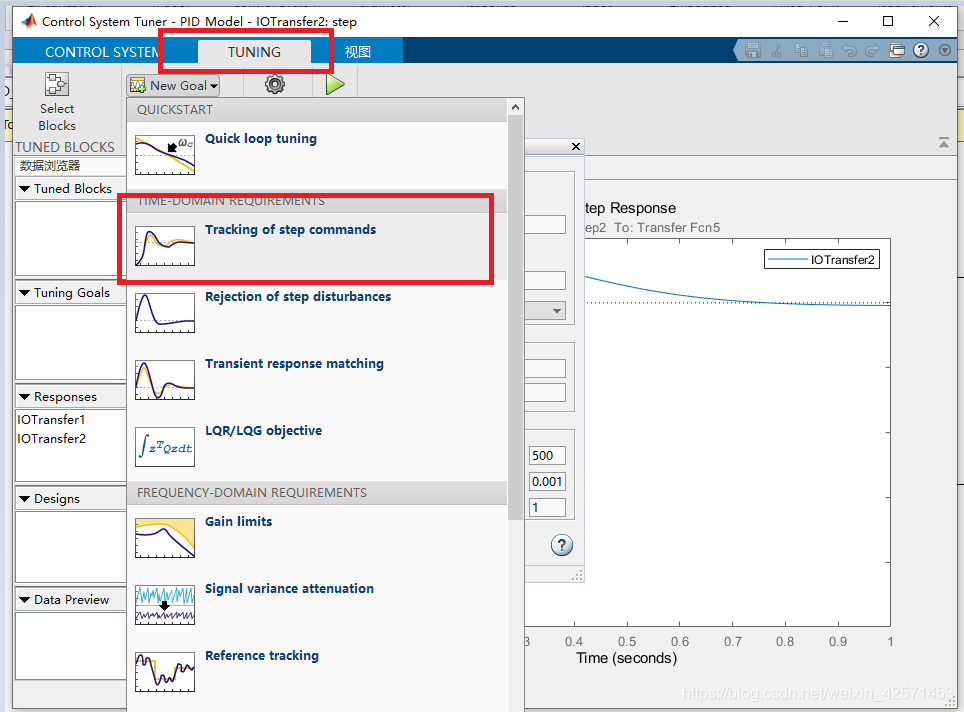
④ 单击TUNING --> Tracking of step commands
④ 添加输入输出,设置调节时间和超调量,然后单击Plot即可。其中紫线是期望曲线,蓝线是当前实际得到的曲线(还没有自动调节 )
⑤ 单击Select Blocks --> Add Blocks,选择自己的PID模块
⑥ 单击 绿色的Tune,即开始自整定,得到满足要求的蓝色曲线
⑦ 单击Update Blocks即把调节好的PID参数,更新到SIMULINK之中
⑧ 可以看到PID模块的参数自动更新了,同时相应曲线,也是刚刚根据自己要求整定得到的曲线
码文不易,谢谢点赞 ^_^
代做领域包括:开关电源、最大功率点跟踪(恒电压法、电导增量法、爬山法、智能算法等)、并网逆变器控制、多目标优化算法(灰狼算法、粒子群、麻雀、哈里斯鹰、布谷鸟等等)、图像处理算法(MATLAB GUI等)、嵌入式、配电网无功优化(IEEE33、21、44节点等)等。
需要的同学私聊我~


















 135
135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









