







目录
1. 简介
Zynq 中的中断可以分为以下几种类型:
软件中断(Software Generated Interrupt, SGI):由软件触发,通常用于CPU之间的通信。
私有外设中断(Private Peripheral Interrupt, PPI):与每个CPU相关的中断,如定时器和看门狗。
共享外设中断(Shared Peripheral Interrupt, SPI):由多个设备共享,可以被路由到任何一个CPU。
中断控制器(GIC)是Zynq中管理中断的核心组件,负责中断的使能、屏蔽、优先级设置以及将中断信号发送到CPU1。
本文展示是一个中断处理示例,记录如何在PS(处理系统)和PL(可编程逻辑)之间使用GPIO(通用输入输出)和中断。
2. 工程与代码解析
2.1 Vivado 工程
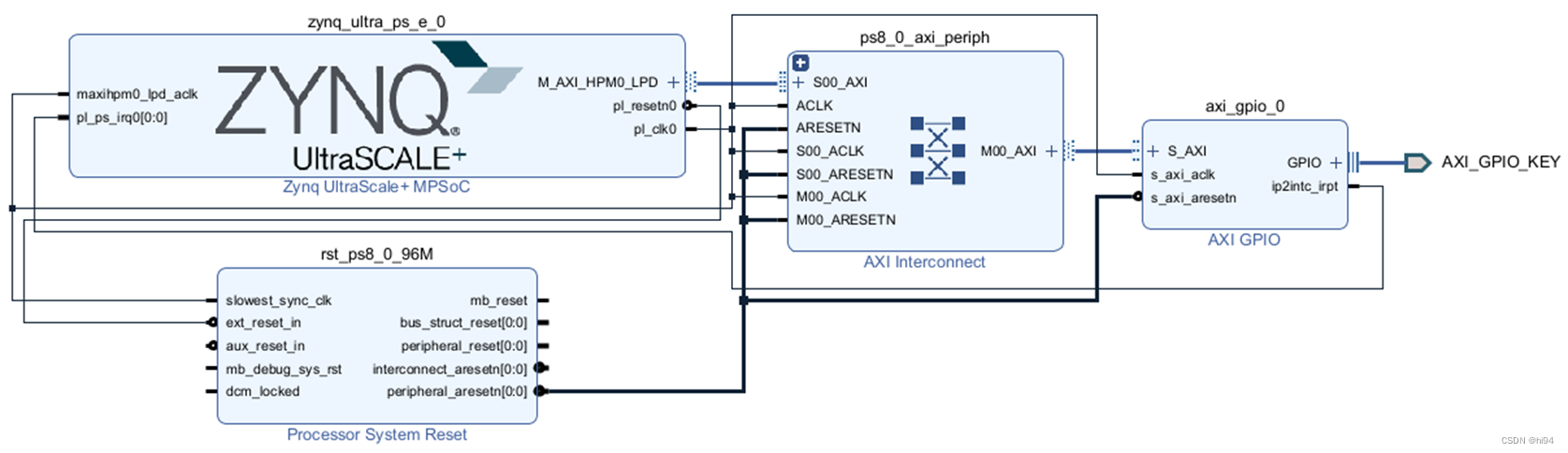
系统中断由多个系统元素生成,并通过GIC代理(GICPx_IRQ 寄存器)广播到GICs、PMU以及PL中的输出信号。
我们重点关注PL中的输出信号:

UG1085: System Interrupts
Datasheet 中的描述的两组中断寄存器,对于到 Zynq 配置页面示意图如下:
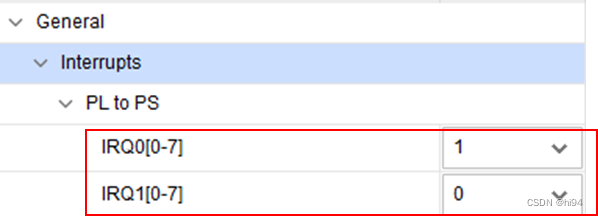
如果查看 "xparameters.h" 文件,可以看到 IRQ 对应的中断号:
//AXI GPIO 中断号 121
#define AXI_GPIO_INTERRUPT_ID XPAR_FABRIC_AXI_GPIO_0_IP2INTC_IRPT_INTR
2.2 Vitis 裸机代码
代码的主要功能包括:
- 初始化:配置PS端和PL端的GPIO设备,包括设置方向和输出使能。
- 中断系统设置:初始化GIC(通用中断控制器),注册中断处理函数,并设置中断优先级和触发类型。
- 中断处理:定义了一个中断处理函数IntrHandler,当检测到AXI GPIO中断时,会打印一条消息。
#include "stdio.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xgpio.h"
#include "sleep.h"
#include "xil_exception.h"
#include "xscugic.h"
#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define AXI_GPIO_DEVICE_ID XPAR_GPIO_0_DEVICE_ID
//AXI GPIO 中断号 121
#define AXI_GPIO_INTERRUPT_ID XPAR_FABRIC_AXI_GPIO_0_IP2INTC_IRPT_INTR
//AXI GPIO 通道
#define GPIO_CHANNEL1 1
#define MIO7_LED 7
#define MIO36_KEY 36
static void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpio *AXI_Gpio,
u16 AXI_GpioIntrId);
static void IntrHandler();
XGpioPs Gpio; /* The driver instance for GPIO Device. */
XScuGic Intc; /* The Instance of the Interrupt Controller Driver */
XGpio AXI_Gpio; /* The Instance of the GPIO Driver */
static XGpioPs_Config *ConfigPtr;
static XScuGic_Config *IntcConfig; /* Instance of the interrupt controller */
int main() {
u32 keyval;
printf("AXI GPIO INTERRUPT TEST!\n\r");
//由 ID 查找 PS 端器件,并初始化
ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);
XGpioPs_CfgInitialize(&Gpio, ConfigPtr, ConfigPtr->BaseAddr);
//PS 端 GPIO 方向设置, 0 - Input, 1 - Output
XGpioPs_SetDirectionPin(&Gpio, MIO7_LED, 1);
XGpioPs_SetDirectionPin(&Gpio, MIO36_KEY, 0);
//PS 端设置输出使能,0 - Disable, 1 - Enable
XGpioPs_SetOutputEnablePin(&Gpio, MIO7_LED, 1);
//由 ID 查找 PL 端器件,并初始化
XGpio_Initialize(&AXI_Gpio, AXI_GPIO_DEVICE_ID);
//PL 端 GPIO 方向设置, 0 - Output, 1 - Input
XGpio_SetDataDirection(&AXI_Gpio, GPIO_CHANNEL1, 0x00000001);
//设置中断系统
SetupInterruptSystem(&Intc, &AXI_Gpio, AXI_GPIO_INTERRUPT_ID);
while(1){
keyval = XGpioPs_ReadPin(&Gpio, MIO36_KEY);
XGpioPs_WritePin(&Gpio, MIO7_LED, ~keyval);
}
return 0;
}
static void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpio *AXI_Gpio,
u16 AXI_GpioIntrId)
{
//根据GIC器件ID,查找器件的配置信息,并初始化
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
XScuGic_CfgInitialize(GicInstancePtr, IntcConfig, IntcConfig->CpuBaseAddress);
//初始化ARM处理器异常句柄
Xil_ExceptionInit();
//注册IRQ异常处理程序
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler)XScuGic_InterruptHandler,
GicInstancePtr);
//使能处理器中断
Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ);
//关联中断处理函数
XScuGic_Connect(GicInstancePtr, AXI_GpioIntrId,
(Xil_ExceptionHandler)IntrHandler,
(void *)AXI_Gpio);
//使能GIC器件中断
XScuGic_Enable(GicInstancePtr, AXI_GpioIntrId);
//0xA0:中断源的优先级, 0x01:中断类型为高电平有效,电平敏感类型
XScuGic_SetPriorityTriggerType(GicInstancePtr, AXI_GpioIntrId, 0xA0, 0x01);
//全局中断使能
XGpio_InterruptGlobalEnable(AXI_Gpio);
//通道中的信号对应的中断使能
XGpio_InterruptEnable(AXI_Gpio, 0x00000001);
}
void IntrHandler() {
if (XGpio_DiscreteRead(&AXI_Gpio, GPIO_CHANNEL1) == 0x00000000){
printf("AXI interrupt detected!\n\r");
}
XGpio_InterruptClear(&AXI_Gpio, 0x00000001);
}
2.3 关键代码解析

为了直观地理解代码的结构和功能,参照图片进行理解:
- 步骤划分和流程图:图片将代码分为几个关键步骤,并以流程图形式展示每个步骤的调用顺序和逻辑关系,帮助读者更好地理解代码的整体流程和各个部分之间的关系。
- 关键代码高亮:图片中标注了关键代码行,例如初始化、GPIO方向设置和中断处理,帮助读者快速定位和理解代码中的重要部分。
- 代码与注释结合:图片将代码与相应的注释结合展示,详细解释了每一行代码的作用和意义,帮助读者更深入地理解代码的实现细节。
3. 总结
在本文中,我们探讨了Zynq平台上中断的概念和分类,包括软件中断、私有外设中断和共享外设中断。我们还介绍了中断控制器(GIC)的作用,它是中断管理的核心。通过一个实际的示例,我们展示了如何在处理系统(PS)和可编程逻辑(PL)之间使用通用输入输出(GPIO)来处理中断。示例代码包括初始化GPIO设备、设置中断系统和定义中断处理函数。
















 7194
7194

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









