






MPC控制器设计,模型预测控制,线性时变模型预测控制,LTV MPC,提供理论讲解与应用实现。
提供MPC算法、LTV MPC 算法在直升机和四旋翼中的应用实例。
提供模型预测控制资料。
提供matlab中模型预测控制工具箱mpcDesign 的使用讲解。
ID:13225637336784644
欲买桂花同载酒
MPC控制器设计是一种在工业自动化领域中广泛应用的控制方法。模型预测控制(Model Predictive Control,简称MPC)通过建立系统的动态模型,对未来一段时间的系统行为进行预测,并根据预测结果制定最优的控制策略,以达到系统稳态和动态性能的要求。
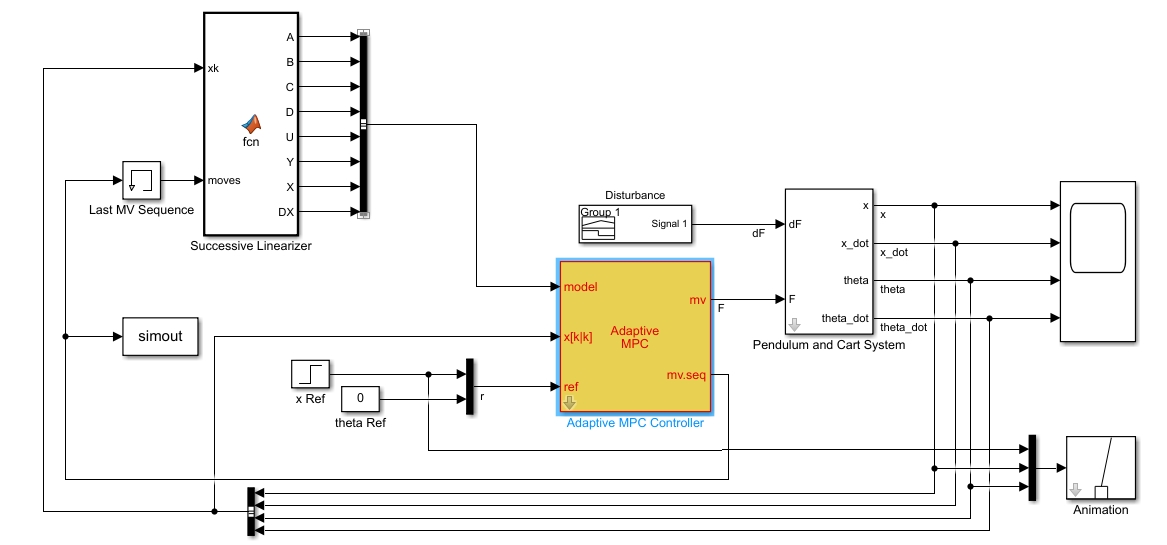
在MPC中,关键的一步是建立系统的数学模型。线性时变模型预测控制(Linear Time-Varying Model Predictive Control,简称LTV MPC)考虑系统动态随时间变化的特性,能够更准确地预测系统行为。LTV MPC将系统模型表示为线性时变的状态空间模型,并通过在线辨识方法来估计模型参数。
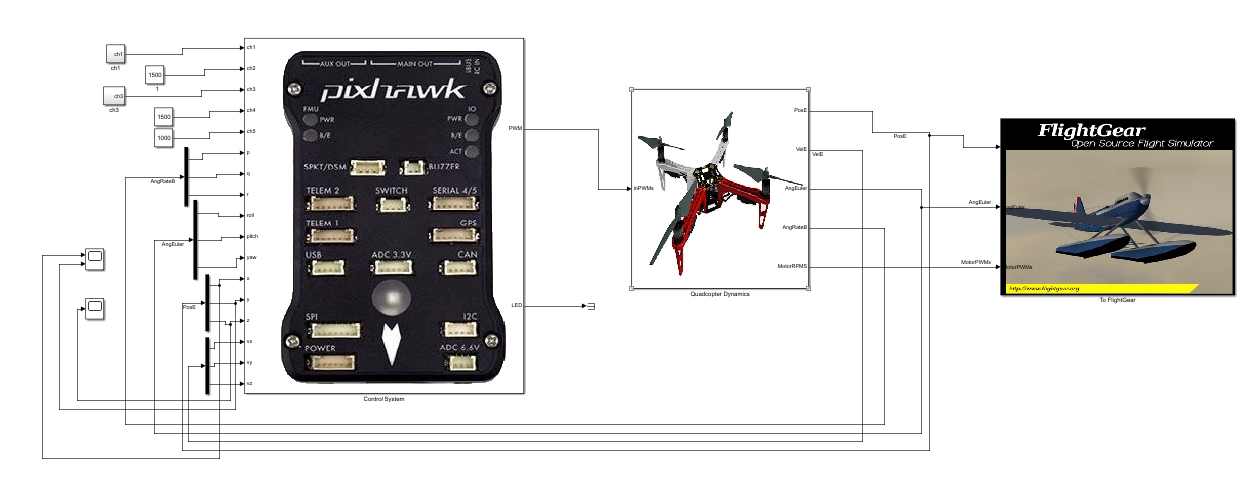
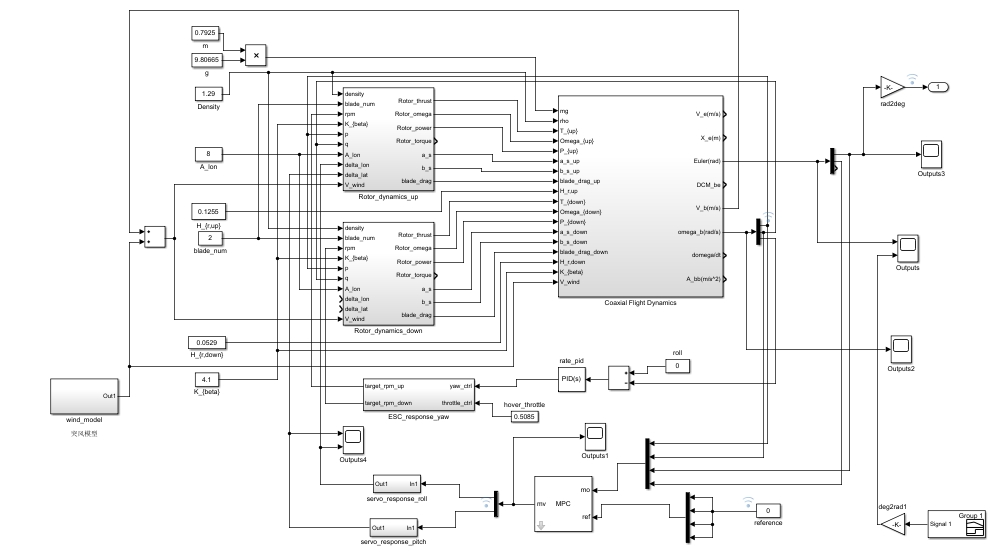
MPC算法在直升机和四旋翼的控制方面有着广泛的应用实例。直升机和四旋翼作为复杂动力系统,需要实时控制其姿态和运动。MPC算法能够结合动力学模型和约束条件,在实时控制中考虑系统的非线性特性和约束条件,从而实现对直升机和四旋翼的精确控制。
除了直升机和四旋翼,MPC算法还在其他领域有着广泛的应用。例如,MPC算法在自动驾驶系统中可以用于车辆的轨迹规划和跟踪控制;在能源管理系统中可以用于电力系统的优化调度和能源存储系统的控制;在化工工艺中可以用于反应器的温度和浓度控制等等。
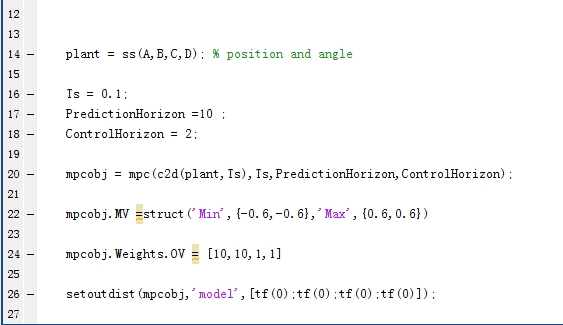
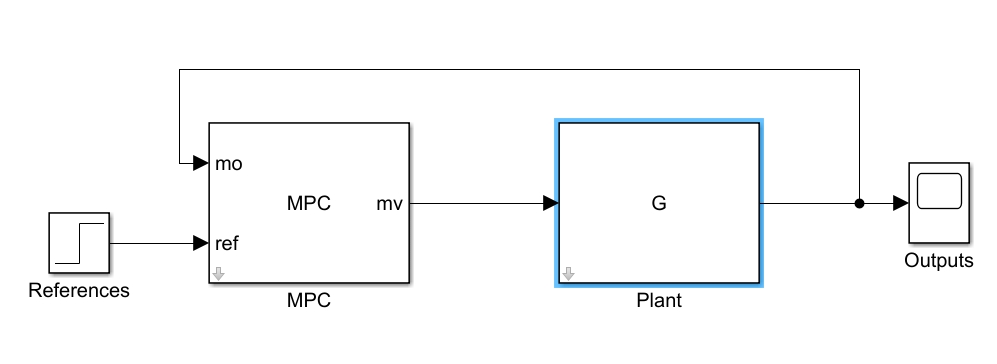
为了更好地理解和应用MPC算法,Matlab提供了一个模型预测控制工具箱mpcDesign。该工具箱包括了一系列用于建模、设计和实施MPC控制器的函数和工具。通过mpcDesign工具箱,用户可以方便地进行MPC控制器的设计和参数调整。
在使用mpcDesign工具箱之前,首先需要了解MPC算法的基本原理和数学模型。MPC算法的基本思想是将系统的动态模型表示为状态空间形式,并通过预测控制器来优化系统的控制策略。具体而言,MPC算法包括以下几个关键步骤:预测模型的建立、优化问题的构建、约束条件的处理和控制器的实施。
预测模型的建立是MPC算法的第一步。在建立预测模型时,需要确定系统的状态变量和输入变量,并根据系统的动态特性建立状态空间模型。常用的建模方法包括系统辨识和物理建模两种。
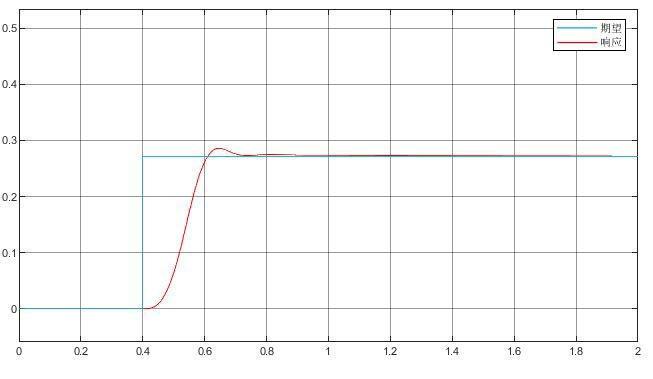
优化问题的构建是MPC算法的核心步骤。在优化问题的构建中,需要确定目标函数和约束条件。目标函数一般包括系统的性能指标,如跟踪误差最小化或能耗最小化。约束条件主要包括输入变量和状态变量的约束,如输入信号的幅值限制、状态变量的范围限制和输入变量的率限制等。
约束条件的处理是MPC算法中一个关键的挑战。由于输入和状态的约束条件可能是非线性的,因此需要将其转化为线性约束。常用的方法包括线性化和非线性约束的近似处理。
控制器的实施是MPC算法的最后一步。通过求解优化问题,可以得到给定时刻的最优控制信号。然后,将此信号应用到实际系统中,以实现对系统的控制。
总结来说,MPC控制器设计是一种广泛应用于工业自动化领域的控制方法。通过对系统的动态特性进行建模和预测,MPC算法能够实现对复杂系统的精确控制。在直升机和四旋翼等领域的应用实例中,MPC算法展示了强大的性能和灵活性。通过Matlab中的mpcDesign工具箱,用户可以更加方便地进行MPC控制器的设计和参数调整。通过深入理解MPC算法的原理和应用,我们可以更好地应用MPC控制器来解决实际的控制问题。
相关的代码,程序地址如下:http://imgcs.cn/637336784644.html
















 656
656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









