







 本文档详细介绍了如何使用Python结合OpenCV库调用Gige接口的工业相机,并展示了两种不同的方法:自动打开0号相机和检测所有相机。主要步骤包括设备枚举、设备信息获取、相机实例创建、句柄创建、打开设备、设置相机参数、图像采集和显示。此外,还提供了回调取流和主动取流两种图像获取方式。
本文档详细介绍了如何使用Python结合OpenCV库调用Gige接口的工业相机,并展示了两种不同的方法:自动打开0号相机和检测所有相机。主要步骤包括设备枚举、设备信息获取、相机实例创建、句柄创建、打开设备、设置相机参数、图像采集和显示。此外,还提供了回调取流和主动取流两种图像获取方式。
OpenCV调用工业相机
python调用海康工业相机并用opencv显示(整体实现)
文章目录
前言
OpenCV可以简单的调用USB相机,只需通过cap = cv2.VideoCapture(0)即可。
可一旦调用Gige等网口连接的工业相机时,使用cap = cv2.VideoCapture(0)或是cap = cv2.VideoCapture(1)、cap = cv2.VideoCapture(2)等等都无法调用。
通过查阅众多文章后,本人根据自身使用要求整理了一份程序
一、MVS 3.4.1下载
不能使用百度上所能搜到的3.1.0版本,Python编程时缺少参数
直接上链接:MVS3.4.1-for-windows
MVS-2.1.2-for-Linux
二、安装
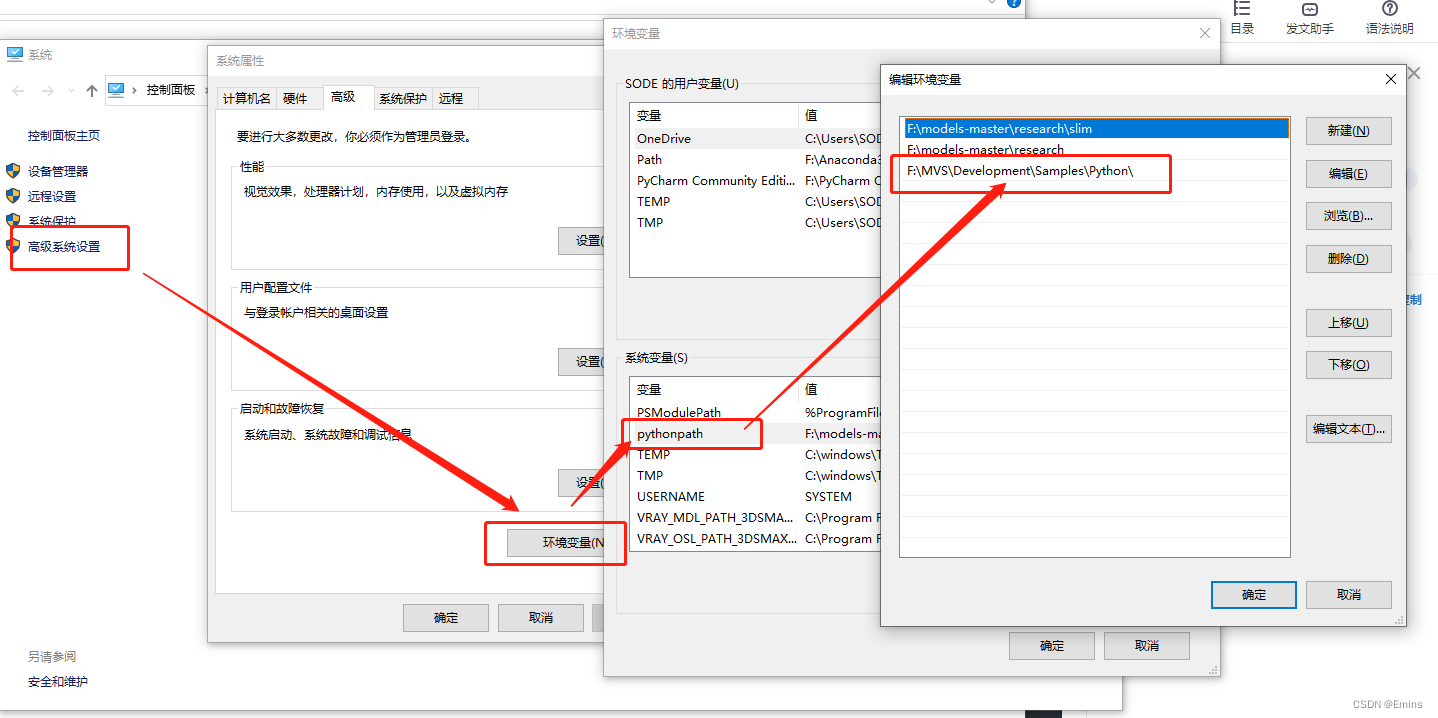
1. 傻瓜式安装,只需记得安装路径即可(环境变量可加可不加)
2. 用Pycharm打开
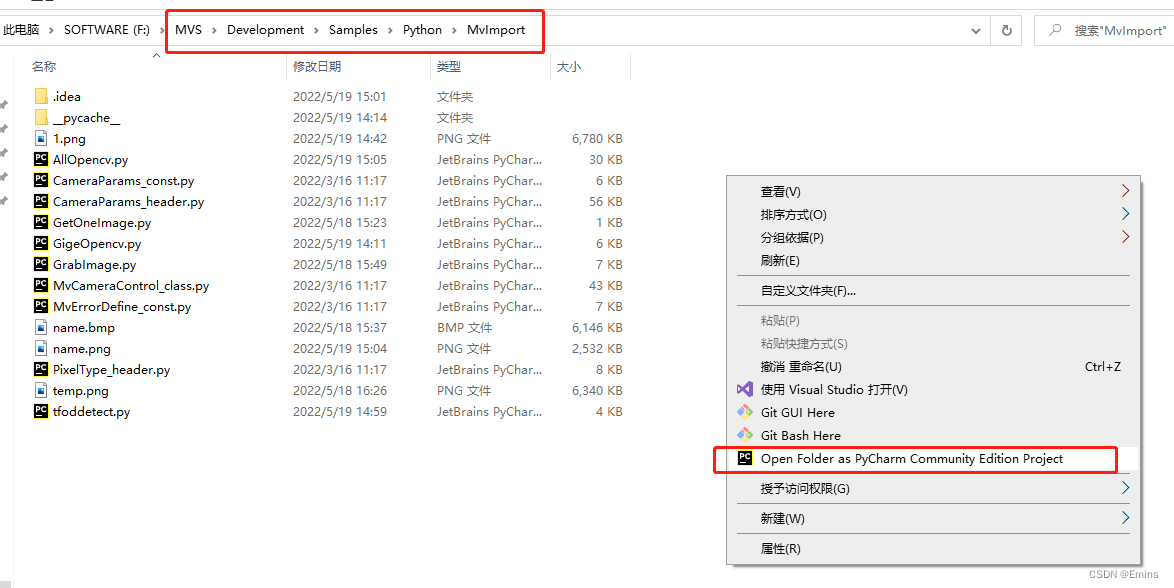
若没正确安装
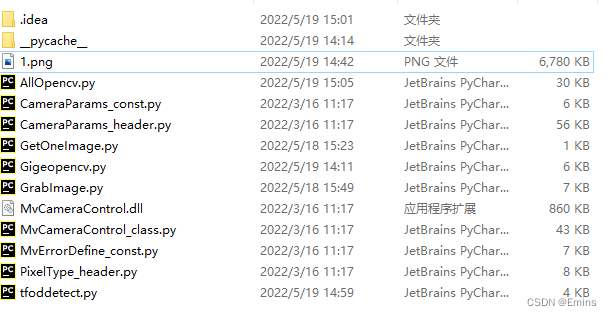
C:\Program Files (x86)\Common Files\MVS\Runtime\Win64_x64里的MvCameraControl.dll可能会缺失
出现该问题就把MvCameraControl.dll复制到上述的Python文件夹

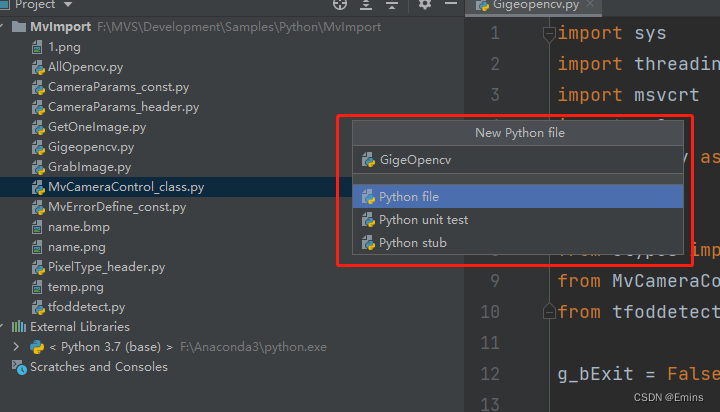
3. 创建GigeOpencv.py文件
import sys
import threading
import msvcrt
import cv2
import numpy as np
import time
from ctypes import *
from MvCameraControl_class import *
# from tfoddetect import *
g_bExit = False
def main():
deviceList = MV_CC_DEVICE_INFO_LIST()
# 选择计算机所使用的相机类型,选越多越慢
# tlayerType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
tlayerType = MV_GIGE_DEVICE | MV_USB_DEVICE
# ch:枚举设备 | en:Enum device
ret = MvCamera.MV_CC_EnumDevices(tlayerType, deviceList)
if ret != 0:
print("enum devices fail! ret[0x%x]" % ret)
sys.exit()
if deviceList.nDeviceNum == 0:
print("find no device!")
sys.exit()
print("Find %d devices!" % deviceList.nDeviceNum)
for i in range(0, deviceList.nDeviceNum):
mvcc_dev_info = cast(deviceList.pDeviceInfo[i], POINTER(MV_CC_DEVICE_INFO)).contents
if mvcc_dev_info.nTLayerType == MV_GIGE_DEVICE:
print("\ngige device: [%d]" % i)
strModeName = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chModelName:
strModeName = strModeName + chr(per)
print("device model name: %s" % strModeName)
# 取得相机IP地址
nip1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24)
nip2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16)
nip3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8)
nip4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff)
print("current ip: %d.%d.%d.%d\n" % (nip1, nip2, nip3, nip4))
# nConnectionNum = input("please input the number of the device to connect:")
# 根据需求直接指定要打开的相机
nConnectionNum = 0
if int(nConnectionNum) >= deviceList.nDeviceNum:
print("intput error!")
sys.exit()
# ch:创建相机实例 | en:Creat Camera Object
cam = MvCamera()
# ch:选择设备并创建句柄 | en:Select device and create handle
stDeviceList = cast(deviceList.pDeviceInfo[int(nConnectionNum)], POINTER(MV_CC_DEVICE_INFO)).contents
ret = cam.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
print("create handle fail! ret[0x%x]" % ret)
sys.exit()
# ch:打开设备 | en:Open device
ret = cam.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
print("open device fail! ret[0x%x]" % ret)
sys.exit()
# ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
if stDeviceList.nTLayerType == MV_GIGE_DEVICE:
nPacketSize = cam.MV_CC_GetOptimalPacketSize()
if int(nPacketSize) > 0:
ret = cam.MV_CC_SetIntValue("GevSCPSPacketSize", nPacketSize)
if ret != 0:
print("Warning: Set Packet Size fail! ret[0x%x]" % ret)
else:
print("Warning: Get Packet Size fail! ret[0x%x]" % nPacketSize)
stBool = c_bool(False)
ret = cam.MV_CC_GetBoolValue("AcquisitionFrameRateEnable", stBool)
if ret != 0:
print("get AcquisitionFrameRateEnable fail! ret[0x%x]" % ret)
sys.exit()
# ch:设置触发模式为off | en:Set trigger mode as off
ret = cam.MV_CC_SetEnumValue("TriggerMode", MV_TRIGGER_MODE_OFF)
if ret != 0:
print("set trigger mode fail! ret[0x%x]" % ret)
sys.exit()
# ch:开始取流 | en:Start grab image
ret = cam.MV_CC_StartGrabbing()
if ret != 0:
print("start grabbing fail! ret[0x%x]" % ret)
sys.exit()
# 常规化窗口大小以及实时显示
# cv2.namedWindow('1', cv2.WINDOW_NORMAL)
while cv2.waitKey(10) != ord('q'):
src = GetImage(cam)
# src即为图片,可通过numpy变换数组
# 此处可根据需要载入tensorflow模型检测
# tfod(src)
cv2.imshow("1", src)
# 只保存图片就直接频闭上段
# src = GetImage(cam)
cv2.imwrite('1.png', src)
cv2.destroyAllWindows()
# ch:停止取流 | en:Stop grab image
ret = cam.MV_CC_StopGrabbing()
if ret != 0:
print("stop grabbing fail! ret[0x%x]" % ret)
sys.exit()
# ch:关闭设备 | Close device
ret = cam.MV_CC_CloseDevice()
if ret != 0:
print("close deivce fail! ret[0x%x]" % ret)
sys.exit()
# ch:销毁句柄 | Destroy handle
ret = cam.MV_CC_DestroyHandle()
if ret != 0:
print("destroy handle fail! ret[0x%x]" % ret)
sys.exit()
cv2.destroyAllWindows()
def GetImage(cam):
sec = 0
data_buf = None
stOutFrame = MV_FRAME_OUT()
memset(byref(stOutFrame), 0, sizeof(stOutFrame))
ret = cam.MV_CC_GetImageBuffer(stOutFrame, 1000)
if None != stOutFrame.pBufAddr and 0 == ret:
if data_buf == None:
data_buf = (c_ubyte * stOutFrame.stFrameInfo.nFrameLen)()
cdll.msvcrt.memcpy(byref(data_buf), stOutFrame.pBufAddr, stOutFrame.stFrameInfo.nFrameLen)
temp = np.asarray(data_buf)
# print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
# stOutFrame.stFrameInfo.nWidth, stOutFrame.stFrameInfo.nHeight, stOutFrame.stFrameInfo.nFrameNum))
# print(temp.shape)
# 可以用上述print来获取数据总大小 如 6291456 = 2048 * 3072 * 1 即得channel为1
# 也可以打开MVS来查看相机分辨率
# 改成使用相机的宽和高以及通道
temp = temp.reshape((2048, 3072, 1))
temp = cv2.cvtColor(temp, cv2.COLOR_BayerBG2BGR)
nRet = cam.MV_CC_FreeImageBuffer(stOutFrame)
return temp
else:
print("no data[0x%x]" % ret)
if __name__ == "__main__":
main()
该段代码是自动打开0号相机,若提示错误检查MvCameraControl.dll是否导入
注意最后的temp.reshape操作,需要完全安装相机配置来更改
此代码仅仅针对Gige工业相机
3. 创建AllOpencv.py文件
此代码所有相机可检测,不过搜索时间会很久
import os
import sys
import numpy as np
from os import getcwd
import cv2
import msvcrt
from ctypes import *
sys.path.append("../MvImport")
from MvCameraControl_class import *
# 枚举设备
def enum_devices(device=0, device_way=False):
"""
device = 0 枚举网口、USB口、未知设备、cameralink 设备
device = 1 枚举GenTL设备
"""
if device_way == False:
if device == 0:
tlayerType = MV_GIGE_DEVICE | MV_USB_DEVICE | MV_UNKNOW_DEVICE | MV_1394_DEVICE | MV_CAMERALINK_DEVICE
deviceList = MV_CC_DEVICE_INFO_LIST()
# 枚举设备, 若是查找unknown设备会很久
ret = MvCamera.MV_CC_EnumDevices(tlayerType, deviceList)
if ret != 0:
print("enum devices fail! ret[0x%x]" % ret)
sys.exit()
if deviceList.nDeviceNum == 0:
print("find no device!")
sys.exit()
print("Find %d devices!" % deviceList.nDeviceNum)
return deviceList
else:
pass
elif device_way == True:
pass
# 判断不同类型设备
def identify_different_devices(deviceList):
# 判断不同类型设备,并输出相关信息
for i in range(0, deviceList.nDeviceNum):
mvcc_dev_info = cast(deviceList.pDeviceInfo[i], POINTER(MV_CC_DEVICE_INFO)).contents
# 判断是否为网口相机
if mvcc_dev_info.nTLayerType == MV_GIGE_DEVICE:
print("\n网口设备序号: [%d]" % i)
# 获取设备名
strModeName = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chModelName:
strModeName = strModeName + chr(per)
print("当前设备型号名: %s" % strModeName)
# 获取当前设备 IP 地址
nip1_1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24)
nip1_2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16)
nip1_3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8)
nip1_4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff)
print("当前 ip 地址: %d.%d.%d.%d" % (nip1_1, nip1_2, nip1_3, nip1_4))
# 获取当前子网掩码
nip2_1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentSubNetMask & 0xff000000) >> 24)
nip2_2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentSubNetMask & 0x00ff0000) >> 16)
nip2_3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentSubNetMask & 0x0000ff00) >> 8)
nip2_4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nCurrentSubNetMask & 0x000000ff)
print("当前子网掩码 : %d.%d.%d.%d" % (nip2_1, nip2_2, nip2_3, nip2_4))
# 获取当前网关
nip3_1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nDefultGateWay & 0xff000000) >> 24)
nip3_2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nDefultGateWay & 0x00ff0000) >> 16)
nip3_3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nDefultGateWay & 0x0000ff00) >> 8)
nip3_4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nDefultGateWay & 0x000000ff)
print("当前网关 : %d.%d.%d.%d" % (nip3_1, nip3_2, nip3_3, nip3_4))
# 获取网口 IP 地址
nip4_1 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nNetExport & 0xff000000) >> 24)
nip4_2 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nNetExport & 0x00ff0000) >> 16)
nip4_3 = ((mvcc_dev_info.SpecialInfo.stGigEInfo.nNetExport & 0x0000ff00) >> 8)
nip4_4 = (mvcc_dev_info.SpecialInfo.stGigEInfo.nNetExport & 0x000000ff)
print("当前连接的网口 IP 地址 : %d.%d.%d.%d" % (nip4_1, nip4_2, nip4_3, nip4_4))
# 获取制造商名称
strmanufacturerName = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chManufacturerName:
strmanufacturerName = strmanufacturerName + chr(per)
print("制造商名称 : %s" % strmanufacturerName)
# 获取设备版本
stdeviceversion = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chDeviceVersion:
stdeviceversion = stdeviceversion + chr(per)
print("设备当前使用固件版本 : %s" % stdeviceversion)
# 获取制造商的具体信息
stManufacturerSpecificInfo = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chManufacturerSpecificInfo:
stManufacturerSpecificInfo = stManufacturerSpecificInfo + chr(per)
print("设备制造商的具体信息 : %s" % stManufacturerSpecificInfo)
# 获取设备序列号
stSerialNumber = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chSerialNumber:
stSerialNumber = stSerialNumber + chr(per)
print("设备序列号 : %s" % stSerialNumber)
# 获取用户自定义名称
stUserDefinedName = ""
for per in mvcc_dev_info.SpecialInfo.stGigEInfo.chUserDefinedName:
stUserDefinedName = stUserDefinedName + chr(per)
print("用户自定义名称 : %s" % stUserDefinedName)
# 判断是否为 USB 接口相机
elif mvcc_dev_info.nTLayerType == MV_USB_DEVICE:
print("\nU3V 设备序号e: [%d]" % i)
strModeName = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chModelName:
if per == 0:
break
strModeName = strModeName + chr(per)
print("当前设备型号名 : %s" % strModeName)
strSerialNumber = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chSerialNumber:
if per == 0:
break
strSerialNumber = strSerialNumber + chr(per)
print("当前设备序列号 : %s" % strSerialNumber)
# 获取制造商名称
strmanufacturerName = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chVendorName:
strmanufacturerName = strmanufacturerName + chr(per)
print("制造商名称 : %s" % strmanufacturerName)
# 获取设备版本
stdeviceversion = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chDeviceVersion:
stdeviceversion = stdeviceversion + chr(per)
print("设备当前使用固件版本 : %s" % stdeviceversion)
# 获取设备序列号
stSerialNumber = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chSerialNumber:
stSerialNumber = stSerialNumber + chr(per)
print("设备序列号 : %s" % stSerialNumber)
# 获取用户自定义名称
stUserDefinedName = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chUserDefinedName:
stUserDefinedName = stUserDefinedName + chr(per)
print("用户自定义名称 : %s" % stUserDefinedName)
# 获取设备 GUID
stDeviceGUID = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chDeviceGUID:
stDeviceGUID = stDeviceGUID + chr(per)
print("设备GUID号 : %s" % stDeviceGUID)
# 获取设备的家族名称
stFamilyName = ""
for per in mvcc_dev_info.SpecialInfo.stUsb3VInfo.chFamilyName:
stFamilyName = stFamilyName + chr(per)
print("设备的家族名称 : %s" % stFamilyName)
# 判断是否为 1394-a/b 设备
elif mvcc_dev_info.nTLayerType == MV_1394_DEVICE:
print("\n1394-a/b device: [%d]" % i)
# 判断是否为 cameralink 设备
elif mvcc_dev_info.nTLayerType == MV_CAMERALINK_DEVICE:
print("\ncameralink device: [%d]" % i)
# 获取当前设备名
strModeName = ""
for per in mvcc_dev_info.SpecialInfo.stCamLInfo.chModelName:
if per == 0:
break
strModeName = strModeName + chr(per)
print("当前设备型号名 : %s" % strModeName)
# 获取当前设备序列号
strSerialNumber = ""
for per in mvcc_dev_info.SpecialInfo.stCamLInfo.chSerialNumber:
if per == 0:
break
strSerialNumber = strSerialNumber + chr(per)
print("当前设备序列号 : %s" % strSerialNumber)
# 获取制造商名称
strmanufacturerName = ""
for per in mvcc_dev_info.SpecialInfo.stCamLInfo.chVendorName:
strmanufacturerName = strmanufacturerName + chr(per)
print("制造商名称 : %s" % strmanufacturerName)
# 获取设备版本
stdeviceversion = ""
for per in mvcc_dev_info.SpecialInfo.stCamLInfo.chDeviceVersion:
stdeviceversion = stdeviceversion + chr(per)
print("设备当前使用固件版本 : %s" % stdeviceversion)
# 输入需要连接的相机的序号
def input_num_camera(deviceList):
nConnectionNum = input("please input the number of the device to connect:")
if int(nConnectionNum) >= deviceList.nDeviceNum:
print("intput error!")
sys.exit()
return nConnectionNum
# 创建相机实例并创建句柄,(设置日志路径)
def creat_camera(deviceList, nConnectionNum, log=True, log_path=getcwd()):
"""
:param deviceList: 设备列表
:param nConnectionNum: 需要连接的设备序号
:param log: 是否创建日志
:param log_path: 日志保存路径
:return: 相机实例和设备列表
"""
# 创建相机实例
cam = MvCamera()
# 选择设备并创建句柄
stDeviceList = cast(deviceList.pDeviceInfo[int(nConnectionNum)], POINTER(MV_CC_DEVICE_INFO)).contents
if log == True:
ret = cam.MV_CC_SetSDKLogPath(log_path)
print(log_path)
if ret != 0:
print("set Log path fail! ret[0x%x]" % ret)
sys.exit()
# 创建句柄,生成日志
ret = cam.MV_CC_CreateHandle(stDeviceList)
if ret != 0:
print("create handle fail! ret[0x%x]" % ret)
sys.exit()
elif log == False:
# 创建句柄,不生成日志
ret = cam.MV_CC_CreateHandleWithoutLog(stDeviceList)
print(1111)
if ret != 0:
print("create handle fail! ret[0x%x]" % ret)
sys.exit()
return cam, stDeviceList
# 打开设备
def open_device(cam):
# ch:打开设备 | en:Open device
ret = cam.MV_CC_OpenDevice(MV_ACCESS_Exclusive, 0)
if ret != 0:
print("open device fail! ret[0x%x]" % ret)
sys.exit()
# 获取各种类型节点参数
def get_Value(cam, param_type="int_value", node_name="PayloadSize"):
"""
:param cam: 相机实例
:param_type: 获取节点值得类型
:param node_name: 节点名 可选 int 、float 、enum 、bool 、string 型节点
:return: 节点值
"""
if param_type == "int_value":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = cam.MV_CC_GetIntValueEx(node_name, stParam)
if ret != 0:
print("获取 int 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
int_value = stParam.nCurValue
return int_value
elif param_type == "float_value":
stFloatValue = MVCC_FLOATVALUE()
memset(byref(stFloatValue), 0, sizeof(MVCC_FLOATVALUE))
ret = cam.MV_CC_GetFloatValue(node_name, stFloatValue)
if ret != 0:
print("获取 float 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
float_value = stFloatValue.fCurValue
return float_value
elif param_type == "enum_value":
stEnumValue = MVCC_ENUMVALUE()
memset(byref(stEnumValue), 0, sizeof(MVCC_ENUMVALUE))
ret = cam.MV_CC_GetEnumValue(node_name, stEnumValue)
if ret != 0:
print("获取 enum 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
enum_value = stEnumValue.nCurValue
return enum_value
elif param_type == "bool_value":
stBool = c_bool(False)
ret = cam.MV_CC_GetBoolValue(node_name, stBool)
if ret != 0:
print("获取 bool 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
return stBool.value
elif param_type == "string_value":
stStringValue = MVCC_STRINGVALUE()
memset(byref(stStringValue), 0, sizeof(MVCC_STRINGVALUE))
ret = cam.MV_CC_GetStringValue(node_name, stStringValue)
if ret != 0:
print("获取 string 型数据 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
string_value = stStringValue.chCurValue
return string_value
# 设置各种类型节点参数
def set_Value(cam, param_type="int_value", node_name="PayloadSize", node_value=None):
"""
:param cam: 相机实例
:param param_type: 需要设置的节点值得类型
int:
float:
enum: 参考于客户端中该选项的 Enum Entry Value 值即可
bool: 对应 0 为关,1 为开
string: 输入值为数字或者英文字符,不能为汉字
:param node_name: 需要设置的节点名
:param node_value: 设置给节点的值
:return:
"""
if param_type == "int_value":
stParam = int(node_value)
ret = cam.MV_CC_SetIntValueEx(node_name, stParam)
if ret != 0:
print("设置 int 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
print("设置 int 型数据节点 %s 成功 !设置值为 %s !" % (node_name, node_value))
elif param_type == "float_value":
stFloatValue = float(node_value)
ret = cam.MV_CC_SetFloatValue(node_name, stFloatValue)
if ret != 0:
print("设置 float 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
print("设置 float 型数据节点 %s 成功 !设置值为 %s !" % (node_name, node_value))
elif param_type == "enum_value":
stEnumValue = node_value
ret = cam.MV_CC_SetEnumValue(node_name, stEnumValue)
if ret != 0:
print("设置 enum 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
print("设置 enum 型数据节点 %s 成功 !设置值为 %s !" % (node_name, node_value))
elif param_type == "bool_value":
ret = cam.MV_CC_SetBoolValue(node_name, node_value)
if ret != 0:
print("设置 bool 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
print("设置 bool 型数据节点 %s 成功 !设置值为 %s !" % (node_name, node_value))
elif param_type == "string_value":
stStringValue = str(node_value)
ret = cam.MV_CC_SetStringValue(node_name, stStringValue)
if ret != 0:
print("设置 string 型数据节点 %s 失败 ! 报错码 ret[0x%x]" % (node_name, ret))
sys.exit()
print("设置 string 型数据节点 %s 成功 !设置值为 %s !" % (node_name, node_value))
# 寄存器读写
def read_or_write_memory(cam, way="read"):
if way == "read":
pass
cam.MV_CC_ReadMemory()
elif way == "write":
pass
cam.MV_CC_WriteMemory()
# 判断相机是否处于连接状态(返回值如何获取)=================================
def decide_divice_on_line(cam):
value = cam.MV_CC_IsDeviceConnected()
if value == True:
print("该设备在线 !")
else:
print("该设备已掉线 !", value)
# 设置 SDK 内部图像缓存节点个数
def set_image_Node_num(cam, Num=1):
ret = cam.MV_CC_SetImageNodeNum(nNum=Num)
if ret != 0:
print("设置 SDK 内部图像缓存节点个数失败 ,报错码 ret[0x%x]" % ret)
else:
print("设置 SDK 内部图像缓存节点个数为 %d ,设置成功!" % Num)
# 设置取流策略
def set_grab_strategy(cam, grabstrategy=0, outputqueuesize=1):
"""
• OneByOne: 从旧到新一帧一帧的从输出缓存列表中获取图像,打开设备后默认为该策略
• LatestImagesOnly: 仅从输出缓存列表中获取最新的一帧图像,同时清空输出缓存列表
• LatestImages: 从输出缓存列表中获取最新的OutputQueueSize帧图像,其中OutputQueueSize范围为1 - ImageNodeNum,可用MV_CC_SetOutputQueueSize()接口设置,ImageNodeNum默认为1,可用MV_CC_SetImageNodeNum()接口设置OutputQueueSize设置成1等同于LatestImagesOnly策略,OutputQueueSize设置成ImageNodeNum等同于OneByOne策略
• UpcomingImage: 在调用取流接口时忽略输出缓存列表中所有图像,并等待设备即将生成的一帧图像。该策略只支持GigE设备,不支持U3V设备
"""
if grabstrategy != 2:
ret = cam.MV_CC_SetGrabStrategy(enGrabStrategy=grabstrategy)
if ret != 0:
print("设置取流策略失败 ,报错码 ret[0x%x]" % ret)
else:
print("设置 取流策略为 %d ,设置成功!" % grabstrategy)
else:
ret = cam.MV_CC_SetGrabStrategy(enGrabStrategy=grabstrategy)
if ret != 0:
print("设置取流策略失败 ,报错码 ret[0x%x]" % ret)
else:
print("设置 取流策略为 %d ,设置成功!" % grabstrategy)
ret = cam.MV_CC_SetOutputQueueSize(nOutputQueueSize=outputqueuesize)
if ret != 0:
print("设置使出缓存个数失败 ,报错码 ret[0x%x]" % ret)
else:
print("设置 输出缓存个数为 %d ,设置成功!" % outputqueuesize)
# 显示图像
def image_show(image, name):
# image = cv2.resize(image, (600, 400), interpolation=cv2.INTER_AREA)
name = str(name)
cv2.imshow(name, image)
cv2.imwrite("name.png", image)
# 需要显示的图像数据转换
def image_control(data, stFrameInfo):
if stFrameInfo.enPixelType == 17301505:
image = data.reshape((stFrameInfo.nHeight, stFrameInfo.nWidth))
image_show(image=image, name=stFrameInfo.nHeight)
elif stFrameInfo.enPixelType == 17301514:
data = data.reshape(stFrameInfo.nHeight, stFrameInfo.nWidth, -1)
image = cv2.cvtColor(data, cv2.COLOR_BAYER_GB2RGB)
image_show(image=image, name=stFrameInfo.nHeight)
elif stFrameInfo.enPixelType == 35127316:
data = data.reshape(stFrameInfo.nHeight, stFrameInfo.nWidth, -1)
image = cv2.cvtColor(data, cv2.COLOR_RGB2BGR)
image_show(image=image, name=stFrameInfo.nHeight)
elif stFrameInfo.enPixelType == 34603039:
data = data.reshape(stFrameInfo.nHeight, stFrameInfo.nWidth, -1)
image = cv2.cvtColor(data, cv2.COLOR_YUV2BGR_Y422)
image_show(image=image, name=stFrameInfo.nHeight)
# 主动图像采集
def access_get_image(cam, active_way="getImagebuffer"):
"""
:param cam: 相机实例
:active_way:主动取流方式的不同方法 分别是(getImagebuffer)(getoneframetimeout)
:return:
"""
if active_way == "getImagebuffer":
stOutFrame = MV_FRAME_OUT()
memset(byref(stOutFrame), 0, sizeof(stOutFrame))
while cv2.waitKey(1) != ord('q'):
ret = cam.MV_CC_GetImageBuffer(stOutFrame, 1000)
if None != stOutFrame.pBufAddr and 0 == ret and stOutFrame.stFrameInfo.enPixelType == 17301505:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
stOutFrame.stFrameInfo.nWidth, stOutFrame.stFrameInfo.nHeight, stOutFrame.stFrameInfo.nFrameNum))
pData = (c_ubyte * stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight)()
cdll.msvcrt.memcpy(byref(pData), stOutFrame.pBufAddr,
stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight)
data = np.frombuffer(pData, count=int(stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight),
dtype=np.uint8)
image_control(data=data, stFrameInfo=stOutFrame.stFrameInfo)
elif None != stOutFrame.pBufAddr and 0 == ret and stOutFrame.stFrameInfo.enPixelType == 17301514:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
stOutFrame.stFrameInfo.nWidth, stOutFrame.stFrameInfo.nHeight, stOutFrame.stFrameInfo.nFrameNum))
pData = (c_ubyte * stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight)()
cdll.msvcrt.memcpy(byref(pData), stOutFrame.pBufAddr,
stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight)
data = np.frombuffer(pData, count=int(stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight),
dtype=np.uint8)
image_control(data=data, stFrameInfo=stOutFrame.stFrameInfo)
elif None != stOutFrame.pBufAddr and 0 == ret and stOutFrame.stFrameInfo.enPixelType == 35127316:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
stOutFrame.stFrameInfo.nWidth, stOutFrame.stFrameInfo.nHeight, stOutFrame.stFrameInfo.nFrameNum))
pData = (c_ubyte * stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 3)()
cdll.msvcrt.memcpy(byref(pData), stOutFrame.pBufAddr,
stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 3)
data = np.frombuffer(pData,
count=int(stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 3),
dtype=np.uint8)
image_control(data=data, stFrameInfo=stOutFrame.stFrameInfo)
elif None != stOutFrame.pBufAddr and 0 == ret and stOutFrame.stFrameInfo.enPixelType == 34603039:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
stOutFrame.stFrameInfo.nWidth, stOutFrame.stFrameInfo.nHeight, stOutFrame.stFrameInfo.nFrameNum))
pData = (c_ubyte * stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 2)()
cdll.msvcrt.memcpy(byref(pData), stOutFrame.pBufAddr,
stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 2)
data = np.frombuffer(pData,
count=int(stOutFrame.stFrameInfo.nWidth * stOutFrame.stFrameInfo.nHeight * 2),
dtype=np.uint8)
image_control(data=data, stFrameInfo=stOutFrame.stFrameInfo)
else:
print("no data[0x%x]" % ret)
nRet = cam.MV_CC_FreeImageBuffer(stOutFrame)
elif active_way == "getoneframetimeout":
stParam = MVCC_INTVALUE_EX()
memset(byref(stParam), 0, sizeof(MVCC_INTVALUE_EX))
ret = cam.MV_CC_GetIntValueEx("PayloadSize", stParam)
if ret != 0:
print("get payload size fail! ret[0x%x]" % ret)
sys.exit()
nDataSize = stParam.nCurValue
pData = (c_ubyte * nDataSize)()
stFrameInfo = MV_FRAME_OUT_INFO_EX()
memset(byref(stFrameInfo), 0, sizeof(stFrameInfo))
while cv2.waitKey(1) != ord('q'):
ret = cam.MV_CC_GetOneFrameTimeout(pData, nDataSize, stFrameInfo, 1000)
if ret == 0:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d] " % (
stFrameInfo.nWidth, stFrameInfo.nHeight, stFrameInfo.nFrameNum))
image = np.asarray(pData)
image_control(data=image, stFrameInfo=stFrameInfo)
else:
print("no data[0x%x]" % ret)
# 回调取图采集
winfun_ctype = WINFUNCTYPE
stFrameInfo = POINTER(MV_FRAME_OUT_INFO_EX)
pData = POINTER(c_ubyte)
FrameInfoCallBack = winfun_ctype(None, pData, stFrameInfo, c_void_p)
def image_callback(pData, pFrameInfo, pUser):
global img_buff
img_buff = None
stFrameInfo = cast(pFrameInfo, POINTER(MV_FRAME_OUT_INFO_EX)).contents
if stFrameInfo:
print("get one frame: Width[%d], Height[%d], nFrameNum[%d]" % (
stFrameInfo.nWidth, stFrameInfo.nHeight, stFrameInfo.nFrameNum))
if img_buff is None and stFrameInfo.enPixelType == 17301505:
img_buff = (c_ubyte * stFrameInfo.nWidth * stFrameInfo.nHeight)()
cdll.msvcrt.memcpy(byref(img_buff), pData, stFrameInfo.nWidth * stFrameInfo.nHeight)
data = np.frombuffer(img_buff, count=int(stFrameInfo.nWidth * stFrameInfo.nHeight), dtype=np.uint8)
image_control(data=data, stFrameInfo=stFrameInfo)
del img_buff
elif img_buff is None and stFrameInfo.enPixelType == 17301514:
img_buff = (c_ubyte * stFrameInfo.nWidth * stFrameInfo.nHeight)()
cdll.msvcrt.memcpy(byref(img_buff), pData, stFrameInfo.nWidth * stFrameInfo.nHeight)
data = np.frombuffer(img_buff, count=int(stFrameInfo.nWidth * stFrameInfo.nHeight), dtype=np.uint8)
image_control(data=data, stFrameInfo=stFrameInfo)
del img_buff
elif img_buff is None and stFrameInfo.enPixelType == 35127316:
img_buff = (c_ubyte * stFrameInfo.nWidth * stFrameInfo.nHeight * 3)()
cdll.msvcrt.memcpy(byref(img_buff), pData, stFrameInfo.nWidth * stFrameInfo.nHeight * 3)
data = np.frombuffer(img_buff, count=int(stFrameInfo.nWidth * stFrameInfo.nHeight * 3), dtype=np.uint8)
image_control(data=data, stFrameInfo=stFrameInfo)
del img_buff
elif img_buff is None and stFrameInfo.enPixelType == 34603039:
img_buff = (c_ubyte * stFrameInfo.nWidth * stFrameInfo.nHeight * 2)()
cdll.msvcrt.memcpy(byref(img_buff), pData, stFrameInfo.nWidth * stFrameInfo.nHeight * 2)
data = np.frombuffer(img_buff, count=int(stFrameInfo.nWidth * stFrameInfo.nHeight * 2), dtype=np.uint8)
image_control(data=data, stFrameInfo=stFrameInfo)
del img_buff
CALL_BACK_FUN = FrameInfoCallBack(image_callback)
# 事件回调
stEventInfo = POINTER(MV_EVENT_OUT_INFO)
pData = POINTER(c_ubyte)
EventInfoCallBack = winfun_ctype(None, stEventInfo, c_void_p)
def event_callback(pEventInfo, pUser):
stPEventInfo = cast(pEventInfo, POINTER(MV_EVENT_OUT_INFO)).contents
nBlockId = stPEventInfo.nBlockIdHigh
nBlockId = (nBlockId << 32) + stPEventInfo.nBlockIdLow
nTimestamp = stPEventInfo.nTimestampHigh
nTimestamp = (nTimestamp << 32) + stPEventInfo.nTimestampLow
if stPEventInfo:
print("EventName[%s], EventId[%u], BlockId[%d], Timestamp[%d]" % (
stPEventInfo.EventName, stPEventInfo.nEventID, nBlockId, nTimestamp))
CALL_BACK_FUN_2 = EventInfoCallBack(event_callback)
# 注册回调取图
def call_back_get_image(cam):
# ch:注册抓图回调 | en:Register image callback
ret = cam.MV_CC_RegisterImageCallBackEx(CALL_BACK_FUN, None)
if ret != 0:
print("register image callback fail! ret[0x%x]" % ret)
sys.exit()
# 关闭设备与销毁句柄
def close_and_destroy_device(cam, data_buf=None):
# 停止取流
ret = cam.MV_CC_StopGrabbing()
if ret != 0:
print("stop grabbing fail! ret[0x%x]" % ret)
sys.exit()
# 关闭设备
ret = cam.MV_CC_CloseDevice()
if ret != 0:
print("close deivce fail! ret[0x%x]" % ret)
del data_buf
sys.exit()
# 销毁句柄
ret = cam.MV_CC_DestroyHandle()
if ret != 0:
print("destroy handle fail! ret[0x%x]" % ret)
del data_buf
sys.exit()
del data_buf
# 开启取流并获取数据包大小
def start_grab_and_get_data_size(cam):
ret = cam.MV_CC_StartGrabbing()
if ret != 0:
print("开始取流失败! ret[0x%x]" % ret)
sys.exit()
def main():
# 枚举设备
deviceList = enum_devices(device=0, device_way=False)
# 判断不同类型设备
identify_different_devices(deviceList)
# 输入需要被连接的设备
nConnectionNum = input_num_camera(deviceList)
# 创建相机实例并创建句柄,(设置日志路径)
cam, stDeviceList = creat_camera(deviceList, nConnectionNum, log=False)
# decide_divice_on_line(cam) ==============
# 打开设备
open_device(cam)
# # 设置缓存节点个数
# set_image_Node_num(cam, Num=10)
# # 设置取流策略
# set_grab_strategy(cam, grabstrategy=2, outputqueuesize=10)
# 设置设备的一些参数
# set_Value(cam, param_type="bool_value", node_name="TriggerCacheEnable", node_value=1)
# 获取设备的一些参数
# get_value = get_Value(cam , param_type = "int_value" , node_name = "PayloadSize")
stdcall = input("回调方式取流显示请输入 0 主动取流方式显示请输入 1:")
if int(stdcall) == 0:
# 回调方式抓取图像
call_back_get_image(cam)
# 开启设备取流
start_grab_and_get_data_size(cam)
# 当使用 回调取流时,需要在此处添加
print("press a key to stop grabbing.")
msvcrt.getch()
# 关闭设备与销毁句柄
close_and_destroy_device(cam)
elif int(stdcall) == 1:
# 开启设备取流
start_grab_and_get_data_size(cam)
# 主动取流方式抓取图像
access_get_image(cam, active_way="getImagebuffer")
# 关闭设备与销毁句柄
close_and_destroy_device(cam)
if __name__ == "__main__":
main()
都是按Q退出程序
三、总文件
后面可根据需要添加其他程序
例如tensorflow目标检测等

















 1134
1134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









