







雷达与通信系统的对比
1.信息源不同。雷达系统的信息源来自于目标,可以说是来自于信道,追寻的是信息源的存在及其参数;通信系统的信息源来自于发射机的输入,目的是信息的传输。
2.在大多数情况下,雷达系统使用相同的天线来发送和接收信号,而通信系统具有不同的发送和接收天线。二个系统的射频部分相似,频段也可能重合,但是采用的信号处理有很大差异。
3.对于干扰的定义,二种系统也是不同的,甚至不同的雷达系统对干扰的定义也是不同的。
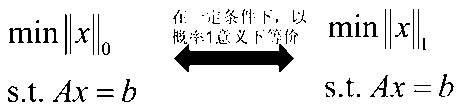
L0范数是指向量中非0的元素的个数。如果我们用L0范数来规则化一个参数矩阵W的话,就是希望W的大部分元素都是0。换句话说,让参数W是稀疏的。
L1范数是指向量中各个元素绝对值之和,也有个美称叫"稀疏规则算子"(Lasso regularization)。
L1范数和L0范数都可以实现稀疏
无源雷达是一种不用发射机发射能量而靠接受温热物体或他源反射的微波能量探测目标的雷达,有天线和灵敏度极高的接收装置。无源雷达鉴别目标的能力,主要取决于目标之间的表面温差和目标的反射系数,天线波束与目标之间的入射余角,无线极化和波束宽度与接收机的最小可检测电子等。
无源雷达自身不发射信号,既带来优点也带来缺点。由于依赖于第三方发射机,操作员对辐射源无法主动控制,在被探测目标保持无线电静默、照射器又不工作的情况下,无源雷达就成了无源之水,不能发挥作用。此外,一些发射机的有效辐射功率较低,易受干扰和空射诱饵的影响而且要求发射机与目标、目标与接收机以及接收机与发射机之间信号不受阻挡,限制了无源雷达的使用。
论文思路:
- 由于发射信号是未知的,常规的基于匹配滤波器的接收机不容易实现,即直接信号和杂波对雷达信号处理造成干扰,给目标检测和参数估计带来困难。
- 一些无源雷达不解调接收信号,为了消除监督信道(SCs)中不需要的echo,引入一个附加的参考通道(RC),用于收集传输信号作为被动检测的参考。但是将RC中的信号视为噪声模板,实现近似匹配滤波器在实际应用中容易受到噪声的干扰,造成性能的下降。
- 由于调制类型通常是已知的,因此可以首先通过解调来估计数据信号,以便实现匹配的滤波器,解调提供了比直接使用RC信号更好的精度。此外,由于数据可以根据接收信号和估计的信道状态进行解调,因此不需要RC,降低了无源雷达的复杂性
- 使用OFDM进行调制。广播信号可以看作是一种特殊形式的脉冲多普勒雷达信号。目标可以使用相应的匹配滤波器组进行搜索。
- 解调误差导致信号模型中存在等效的脉冲噪声,从而增加杂波和强目标的旁瓣。因为目标的反射信号非常小,因此解调误差会对目标的检测和估计造成非常大的性能的下降。
- 目标和杂波的数量较少,因此目标和杂波反射信号在Delay-Doppler域是稀疏的;在正常工作条件下,通信系统的解调错误率通常很低,因此解调误差也是稀疏的。因此考虑了CS即压缩感知算法。
- CS算法关注的是可以用有限离散字典稀疏表示的信号,因此假设Interest频率位于固定频率网格上。然而,由于目标和杂波通常由连续域(时延和多普勒频率)的参数指定,离散化往往导致模型失配和恢复退化。
- 为了克服传统的基于稀疏的网格不匹配问题,论文引入了连续稀疏恢复超分辨率方法。
- 因此使用L0范数表示目标和杂波反射信号的稀疏性,L1范数表示解调误差信号的稀疏性,目标和杂波的参数可以通过求解凸半定规划问题(SDP)来估计。论文同时提出了一种基于乘法器交替方向法(ADMM)的迭代算法,来解决这个SDP问题,其中每次迭代都涉及到封闭计算。
















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











