







基于OTFS-ISAC信号同时考虑上行和下行传输,OTFS信号既用于车辆状态的感知,又用于下行通信
对于下行传输
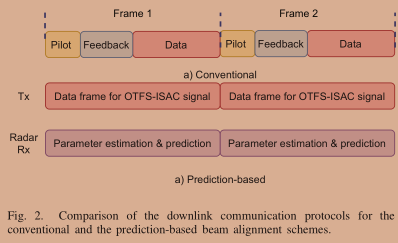
路侧单元RSU能够同时向车辆发送下行信息,并根据反射回声估计车辆的感知参数(位置、速度)
RSU可以得到通信范围内与车辆相关的时延、多普勒和角度的估计,用于构建车辆网络的动态拓扑构建车辆网络拓扑结构,实现对接下来时刻瞬间的车辆状态的预测
由于DD域信道的慢时变特性,RSU可以预测信道参数并进行预均衡以对抗下行传输的信道动态变化,从而有效地制定发射下行波束形成器来抵消信道动态变化的影响,允许在车辆上使用直接的单抽头最大似然检测器,使车辆可以直接检测到信息而不需要进行信道估计。
对于上行传输
RSU可以根据所构建车辆网络的动态拓扑,预测RSU上不同路径的时延和多普勒。不需要像传统方法那样插入保护间隔来进行上行通道估计,从而消除了所需的训练开销
ISFFT将信号从DD域转换到TF域:

RSU在时域内生成传输的ISAC信号:

From the view of the RSU, the radar sensing channel is both time and frequency selective, which is given by

The P-dimensional received echo can be written by

导向矢量对于不同的车辆来说是正交的,因此RSU可以区分来自不同车辆的不同回波
在接受完所有的回波后,RSU可以利用一组发射信号si (t)进行雷达匹配滤波

经过雷达匹配滤波后,可以得到车辆对应的信号延迟和多普勒频移的估计,因此接收到的信号可以写成
![]()
如果引导向量向不同方向具有渐近正交性,则下行通道可以用los主导通道建模

在第i辆车上接收到的信号为
![]()
通过多载波解调和接收滤波器得到TF域,再经过SFFT变换到DD域:

DD 域对于下行通道的输入输出关系为:

DD 域对于上行通道的输入输出关系为:

- 状态估计:在瞬间η时刻,RSU发送OTFS-ISAC向所有车辆发出信号。反射回波在RSU处接收,用于估计运动参数,即η时刻车辆的延迟、多普勒和角度。

- 动态拓扑构建与预测:利用车辆的延迟、多普勒和角度,可以推断车辆的位置、速度和时间η,帮RSU构建车辆网络的动态拓扑。RSU可以预测η + 1时刻下车辆的速度和位置。
- 辅助下行通信:基于预测车辆的速度和位置在时间瞬间η +1时,RSU还能预测η +1时刻与车辆相关的角度和通道损伤。然后RSU在η + 1时刻发射OTFS-ISAC信号之前,可以根据预测的参数制定发射波束形成器并对抗信道缺陷,下行传输时补偿RSU侧的信道变化。因此,车辆可以绕过信道估计的需要进行数据检测。
- 辅助上行通信:基于第2步中预测的位置和速度,RSU还得到了车辆之间的相对距离和速度,并将其转换为η +1时刻上行DD域通道相关的时延和多普勒。由于RSU知道多路径信道的干扰模型,不需要像传统方法那样插入保护间隔来进行上行通道估计,从而消除了所需的训练开销。

















 260
260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











