







算法简介
Dijkstra算法是一种全局路径规划算法,是从一个节点遍历其余各节点的最短路径算法,解决的是有权图中最短路径问题。
算法思想
- 设G=(V,E)是一个带权有向图,把图中节点集合V分成两组,第一组为已求出最短路径的节点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径, 就将该节点加入到集合S中,直到全部节点都加入到S中,算法就结束了);
- 第二组为其余未确定最短路径的节点集合(用U表示),按最短路径长度的递增次序依次把第二组的节点加入S中。在加入的过程中,总保持从源点v到S中各节点的最短路径长度不大于从源点v到U中任何节点的最短路径长度。
示例分享
来看下面一幅图,以D节点为源点,依次遍历其他所有节点。
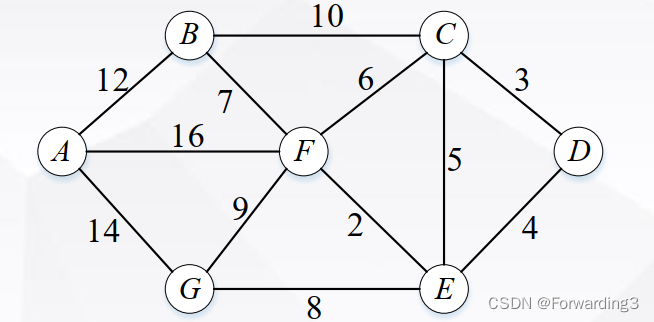
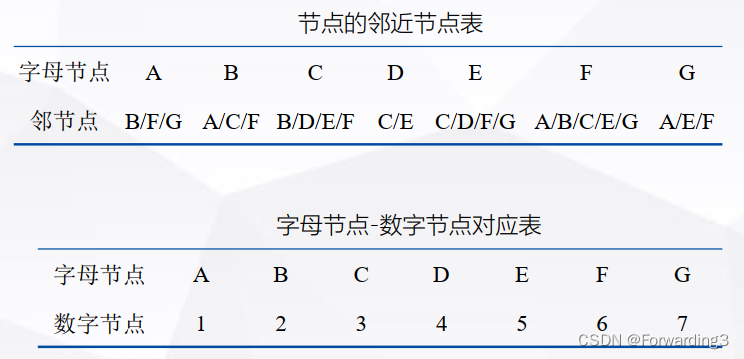
每个节点的信息如下图所示:
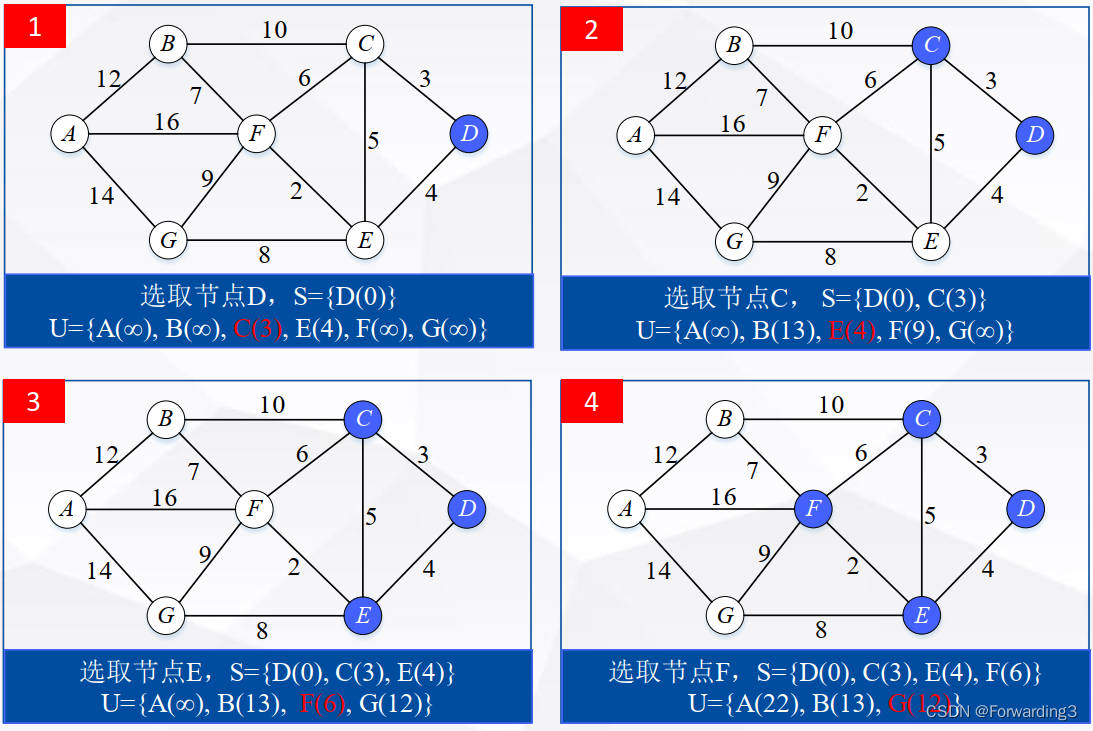
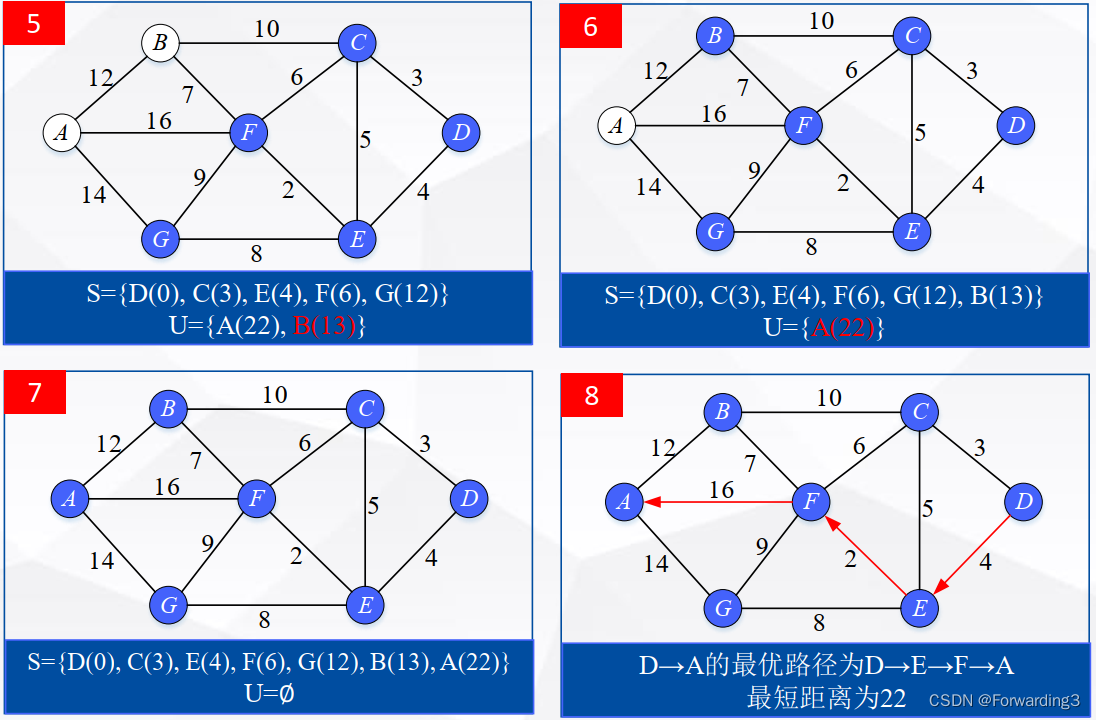
算法更新流程
MATLAB实现
clc
clear
close all
%% 图定义
% 根据节点的邻近节点表及字母节点-数字节点对应表,构造节点元胞数组
nodes_dist = cell(0);
nodes_dist(1,:) = {1, [2, 6, 7], [12, 16, 14]};
nodes_dist(2,:) = {2, [1, 3, 6], [12, 10, 7]};
nodes_dist(3,:) = {3, [2, 4, 5, 6], [10, 3, 5, 6]};
nodes_dist(4,:) = {4, [3, 5], [3, 4]};
nodes_dist(5,:) = {5, [3, 4, 6, 7], [5, 4, 2, 8]};
nodes_dist(6,:) = {6, [1, 2, 3, 5, 7], [16, 7, 6, 2, 9]};
nodes_dist(7,:) = {7, [1, 5, 6], [14, 8, 9]};
%% 算法初始化
% S/U的第一列表示节点编号
% 对于S,第二列表示从源节点到本节点已求得的最小距离,不再变更;
% 对于U,第二列表示从源节点到本节点暂时求得的最小距离,可能会变更
S = [4, 0];
U(:,1) = [1, 2, 3, 5, 6, 7];
U(:,2) = [inf, inf, 3, 4, inf, inf];
% 最优路径及暂时最优路径的初始化
path_opt = cell(7,2);
path_opt(4,:) = {4, 4};
path_temp = cell(7,2);
path_temp(3,:) = {3, [4, 3]};
path_temp(4,:) = {4, 4};
path_temp(5,:) = {5, [4, 5]};
%% 循环遍历所有节点
while ~isempty(U)
% 在U集合找出当前最小距离值及对应节点,并移除该节点至S集合中
[dist_min, idx] = min(U(:,2));
node_min = U(idx, 1);
S(end+1,:) = [node_min, dist_min];
U(idx,:) = [];
% 将最小距离值的节点添加到最优路径集合
path_opt(node_min,:) = path_temp(node_min,:);
%% 依次遍历最小距离节点的邻节点,判断是否在U集合中更新邻节点的距离值
for i = 1:length(nodes_dist{node_min, 2})
% 需要判断的节点
node_temp = nodes_dist{node_min, 2}(i);
% 找出U集合中节点node_temp的索引值
idx_temp = find(node_temp == U(:,1));
% 判断是否更新
if ~isempty(idx_temp)
if dist_min + nodes_dist{node_min, 3}(i) < U(idx_temp, 2)
U(idx_temp, 2) = dist_min + nodes_dist{node_min, 3}(i);
% 更新暂时最优路径
path_temp{node_temp, 1} = node_temp;
path_temp{node_temp, 2} = [path_opt{node_min, 2}, node_temp];
end
end
end
end
C++实现
Dijkstra.h
#pragma once
#include<iostream>
#include<stack>
using namespace std;
#define MAX_VERTEX_NUM 20 //顶点的最大个数
#define INFINITE 9999 //定义无穷大的数值
#define VRType int //顺序存储结构中,对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值
#define VertexType int //图中顶点的数据类型
class MGraph //图的顺序存储结构
{
public:
VertexType vexs[MAX_VERTEX_NUM]; //一维数组,存储图中顶点数据
VRType arcs[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; //二维数组,记录顶点之间的关系 //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值
int vexnum; //记录图的顶点数
int arcnum; //记录图的弧(或边)数
};
class Dijkstra
{
public:
Dijkstra();//构造函数,初始化邻接矩阵
int LocateVex(MGraph &G, VertexType v); //根据顶点本身数据,判断出顶点在二维数组中的位置
void CreateUDN(MGraph &G);//构造无向带权图
void PrintGrapth(MGraph G); //打印整个图
void ShortestPath_Dijkstra();
public:
MGraph G;//创建图的对象
int V0 = 0;//起点下标,初始化为0,也就是默认输入的第一个值就是起点
int Patharc[MAX_VERTEX_NUM];//存储最短路径下标,也就是每个顶点被访问后的前驱顶点的下标;
int Distance[MAX_VERTEX_NUM];//存储到各点最短路径的权值之和
bool final[MAX_VERTEX_NUM];//标志位,final[w]=true表示已经求得V0到Vw的最短路径,w这个顶点已经被访问;
int k;//临时下标
int min;//min是临时最短路径的权值(最小权值之和);
stack<int> path;//用于打印
};
Dijkstra.cpp
#include "Dijkstra.h"
Dijkstra::Dijkstra()//构造函数,初始化邻接矩阵
{
CreateUDN(G);//在初始化时就创建图
//遍历所有顶点,更新Distance、Patharc和final三个数组,更新起点信息;
for (int i = 0; i < G.vexnum; i++)
{
final[i] = false;//全部顶点先初始化为未找到最短路径;
Distance[i] = G.arcs[V0][i];//将与V0邻接的顶点所构成的边加上权值,其他保持为INFINITE;也就是读取邻接矩阵里的信息,赋值到Distance数组中;
Patharc[i] = V0;//前驱顶点的下标先全部置为V0;//这里不能初始化为0或者-1,后续会出错,要初始化为源点;
}
Distance[V0] = 0;//起点就是V0,V0到V0距离为0;
final[V0] = true;//起点V0已经找到最短路径;
cout << endl;
PrintGrapth(G);//打印整个图
}
int Dijkstra::LocateVex(MGraph &G, VertexType v) //根据顶点本身数据,判断出顶点在数组中的位置
{
//遍历一维数组,找到变量v
for (int i = 0; i < G.vexnum; i++)
{
if (G.vexs[i] == v)
{
return i;//找到了
}
}
//如果找不到,输出提示语句,返回-1
cout << "no such vertex." << endl;
return -1;
}
void Dijkstra::CreateUDN(MGraph &G)//构造无向带权图
{
int v;
int a;
reInput1:
cout << "请输入网的顶点数:" << endl;
cin >> v;
if (v > MAX_VERTEX_NUM || v <= 0)
{
cout << "顶点数超出范围,请重新输入" << endl;
goto reInput1;
}
reInput2:
cout << "请输入网的边数:" << endl;
cin >> a;
if (a > (v * (v - 1) / 2) || a <= 0)
{
cout << "边数超出范围,请重新输入" << endl;
goto reInput2;
}
G.vexnum = v;
G.arcnum = a;
int vex;
for (int i = 0; i < G.vexnum; i++) //输入每个顶点的元素数据,给一维数组赋值
{
cout << "请输入该顶点的元素:" << endl;
cin >> vex;
G.vexs[i] = vex;
}
for (int i = 0; i < G.vexnum; i++) //初始化矩阵,给矩阵赋值
{
for (int j = 0; j < G.vexnum; j++)
{
G.arcs[i][j] = INFINITE;//先把矩阵的每个元初始化为无穷
}
}
for (int i = 0; i < G.arcnum; i++) //创建顶点之间的连接关系,更新矩阵
{
VertexType v1, v2;
VRType w;
cout << "请输入要创建关系的两个顶点元素:" << endl;
cin >> v1;
cin >> v2;
cout << "请输入这两个顶点之间边的权值:" << endl;
cin >> w;
int n = LocateVex(G, v1);
int m = LocateVex(G, v2); //确定顶点位置
if (m == -1 || n == -1)
{
cout << "no this vertex." << endl;//输入的两个顶点至少有一个不存在
return;
}
G.arcs[n][m] = w;//权值赋值
G.arcs[m][n] = w;//矩阵对称
}
for (int i = 0; i < G.vexnum; i++)
{
for (int j = 0; j < G.vexnum; j++)
{
if (i == j) //对角线上的元置0
{
G.arcs[i][j] = 0;
}
}
}
}
void Dijkstra::PrintGrapth(MGraph G) //打印整个图
{
cout << "图的邻接矩阵是:" << endl;
for (int i = 0; i < G.vexnum; i++)
{
for (int j = 0; j < G.vexnum; j++)
{
cout << G.arcs[i][j] << ", ";
}
cout << endl;
}
cout << endl;
}
void Dijkstra::ShortestPath_Dijkstra()
{
for (int i = 1; i < G.vexnum; i++)//v从1开始,因为V0已经确定了,不再考虑;//遍历邻接矩阵的每一列
{
min = INFINITE;//先让min=无穷,先和无穷比,比无穷小说明有连线,否则没有连线;
for (int j = 0; j < G.vexnum; j++)//遍历邻接矩阵的每一行
{
if (!final[j] && Distance[j] < min)//如果w这个顶点还没有确认最短路径,并且现有的权值之和小于min
{
k = j;//更新下标
min = Distance[j];//更新min
}
//到这里为止只是更新了两个临时变量,还没有更新三个数组的内容
}
final[k] = true;//将目前找到的顶点置为ture,也就是k这个顶点已经找到最短路径 //final数组被更新
for (int j = 0; j < G.vexnum; j++)//还是遍历每一行,更新当前最短路径前驱顶点和路径值
{
if (!final[j])//如果w这个顶点还没有确认最短路径,
{
if (min + G.arcs[k][j] < Distance[j])//并且经过k顶点到达j顶点的路径总和,要小于不经过k顶点、直接到达j顶点的路径;
{
Distance[j] = min + G.arcs[k][j];//就把最短路径的值更新为经过k顶点的路径总和,也就是选更小的权值和;//Distance数组被更新
Patharc[j] = k;//前驱顶点下标更新为k //Patharc数组被更新
}
}
}
}
cout << endl;
/*for (auto i : Patharc)
{
cout << i << " ";
}
cout << endl;*/ //调试用
//打印
cout << "Dijkstra算法求出的最短路径是:" << endl;
for (int i = 0; i < G.vexnum; i++)
{
if (i != 0 && Distance[i] != INFINITY)
{
cout << "从顶点" << G.vexs[V0] << "到顶点" << G.vexs[i] << "," << "最短路径权值是:" << Distance[i] << ",最短路径为:";
int m = i;
while (m != 0)
{
path.push(G.vexs[m]);//入栈
m = Patharc[m];//m更新为m的前驱
}
path.push(G.vexs[V0]);
while (!path.empty())
{
if (path.size() == 1)
{
cout << path.top();//打印最后一个栈元素
}
else
{
cout << path.top() << "->";//打印栈顶
}
path.pop();//出栈
}
cout << endl;
}
}
cout << endl;
}
int main()
{
Dijkstra D0; //创建Dijkstra类的对象
D0.ShortestPath_Dijkstra();//求最短路径
system("pause");
return 0;
}















 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









