






 本文介绍了一种基于Simulink-CarSim的电动汽车模型,集成了前轮主动转向和直接横摆力矩控制,通过MPC、SMC算法及滑移率实现精准操控,模型在仿真中显示优异的跟踪精度和稳定性。
本文介绍了一种基于Simulink-CarSim的电动汽车模型,集成了前轮主动转向和直接横摆力矩控制,通过MPC、SMC算法及滑移率实现精准操控,模型在仿真中显示优异的跟踪精度和稳定性。
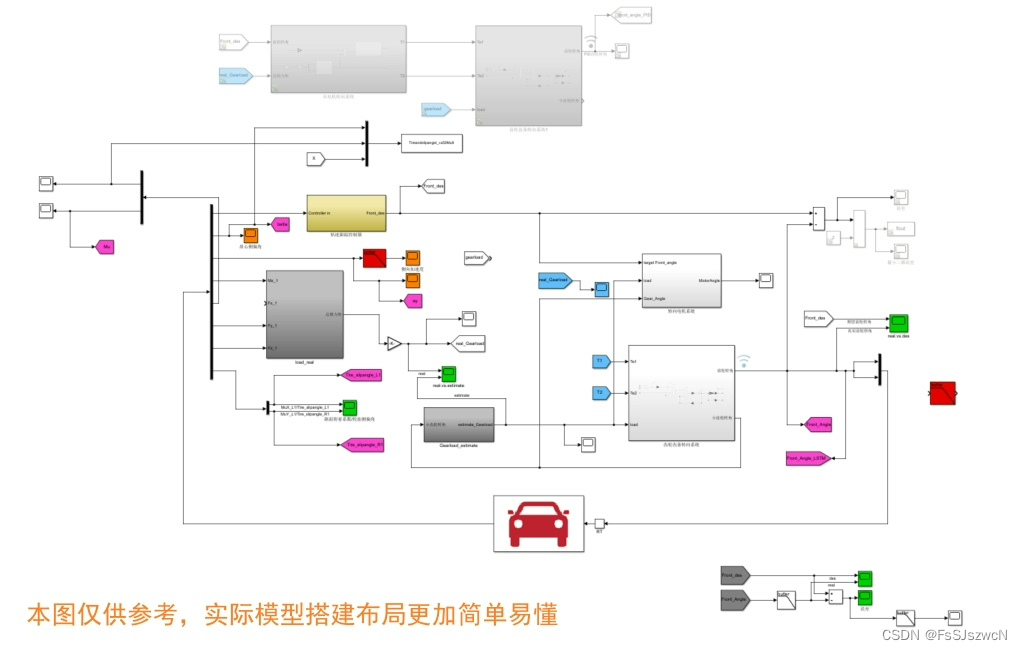
前轮主动转向+直接横摆力矩联合控制的分布式驱动电动汽车模型设计开发。
基于Simulink-CarSim联合仿真平台开发,主要包含模块:前轮主动转向功能模块(包含自主转向控制器、转向器模型)、直接横摆力矩功能模块(横摆力矩决策模块、横摆力矩分配模块)。
补充说明:自主转向控制器基于MPC算法搭建;转向器模型基于数学模型搭建;横摆力矩决策模块基于SMC算法搭建;横摆力矩分配模块基于滑移率进行四轮分配。
模型仿真结果具有良好的跟踪精度和车辆稳定性
前轮主动转向+直接横摆力矩联合控制的分布式驱动电动汽车模型设计开发
摘要:本文基于Simulink-CarSim联合仿真平台,设计和开发了一种具有前轮主动转向和直接横摆力矩联合控制功能的分布式驱动电动汽车模型。该模型包含前轮主动转向功能模块和直接横摆力矩功能模块。前轮主动转向功能模块由自主转向控制器和转向器模型组成,采用MPC算法和数学模型实现。直接横摆力矩功能模块包括横摆力矩决策模块和横摆力矩分配模块,使用SMC算法和滑移率进行四轮分配。通过模型仿真,证明了该设计具有良好的跟踪精度和车辆稳定性。
1. 引言
随着电动汽车的快速发展,越来越多的技术被应用于电动汽车的设计和控制中。其中,前轮主动转向和直接横摆力矩是提高车辆操控性和稳定性的重要技术。本文基于Simulink-CarSim联合仿真平台,设计和开发了一种分布式驱动电动汽车模型,通过前轮主动转向和直接横摆力矩的联合控制,实现了更高的车辆灵活性和操控性。
2. 前轮主动转向功能模块
前轮主动转向功能模块是本设计的核心组成部分,它包括自主转向控制器和转向器模型。自主转向控制器采用MPC算法,通过对车辆动力学模型的预测和优化,实现对转向器的精确控制。转向器模型基于数学模型,通过对转向系统的建模和仿真,获得转向系统的准确响应特性。
3. 直接横摆力矩功能模块
直接横摆力矩功能模块主要实现对车辆横向运动的控制。它包括横摆力矩决策模块和横摆力矩分配模块。横摆力矩决策模块采用SMC算法,通过对车辆运动状态的估计和分析,确定最优的横摆力矩控制策略。横摆力矩分配模块基于滑移率进行四轮分配,确保车辆在转弯和直线行驶时的稳定性和操控性。
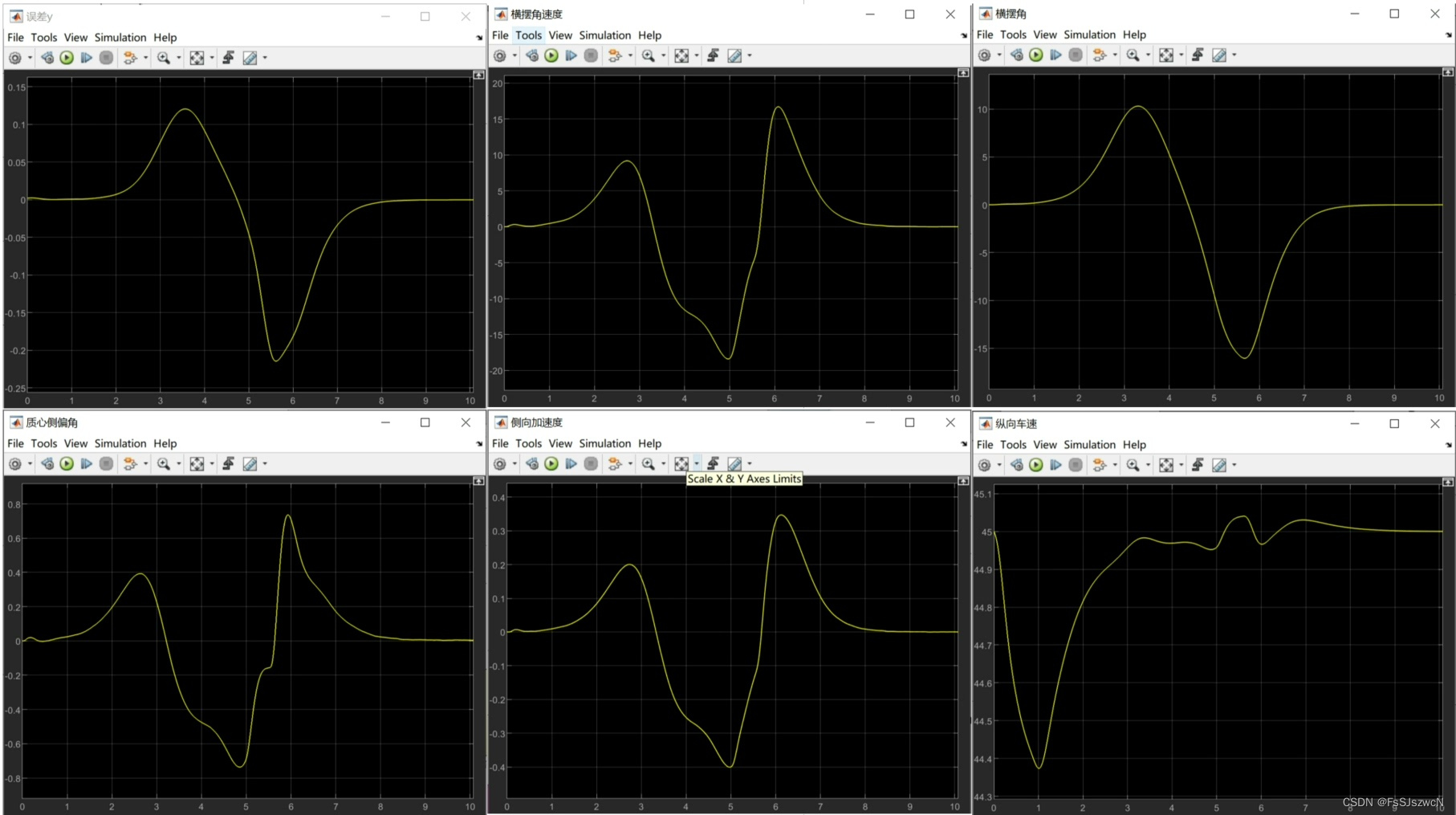
4. 模型仿真结果
通过Simulink-CarSim联合仿真平台,对设计的分布式驱动电动汽车模型进行了仿真。仿真结果显示,该模型具有良好的跟踪精度和车辆稳定性。在不同道路条件和驾驶场景下,该模型都能保持良好的操控性能,满足用户的需求。
5. 其他可选模块
除了前轮主动转向和直接横摆力矩功能模块外,本设计还提供了其他可选模块。其中,路面附着系数模型可以用于模拟不同路面条件下的车辆操控性能;轮胎侧偏力模型可以用于分析车辆在转弯时的侧向力分布。同时,本设计还支持车辆轨迹跟踪控制定制化模型,满足用户对于个性化控制需求的要求。
6. 总结
本文基于Simulink-CarSim联合仿真平台,设计和开发了一种具有前轮主动转向和直接横摆力矩联合控制功能的分布式驱动电动汽车模型。通过对前轮主动转向和直接横摆力矩的精确控制,该模型能够提供更高的车辆灵活性和操控性。经过仿真验证,该模型具有良好的跟踪精度和车辆稳定性,在不同道路条件和驾驶场景下都能满足用户的需求。
相关代码,程序地址:http://imgcs.cn/lanzoun/732767162478.html















 1384
1384











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









