






电动汽车充放电最优调度20
研究了EV充电和放电的调度优化问题。
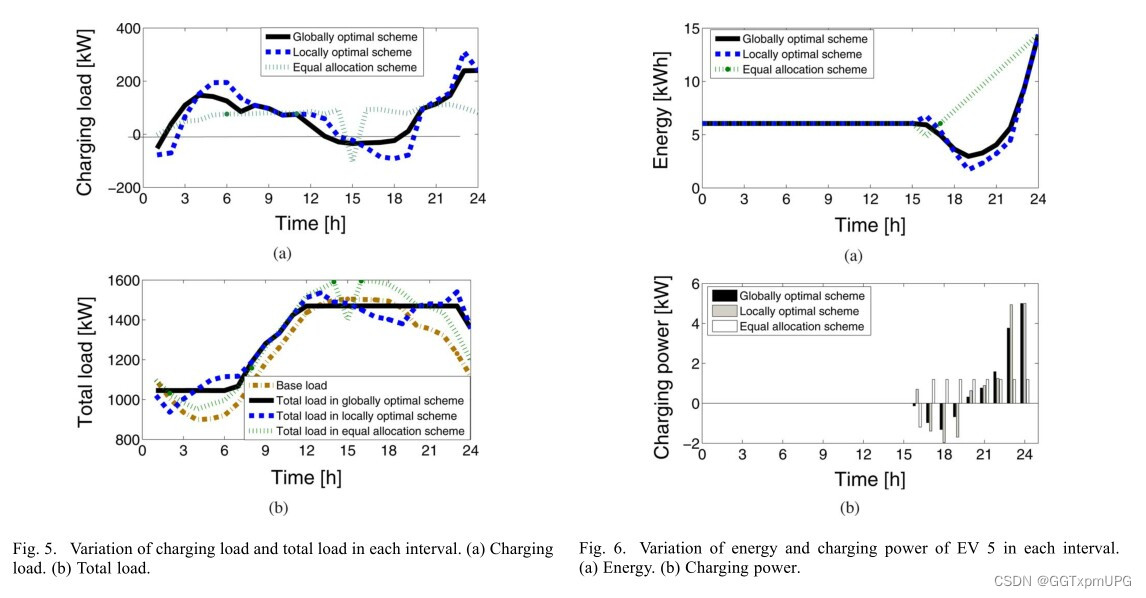
我们首先制定全局调度优化问题,其中优化充电功率以最小化所有在白天执行充电和放电的EV的总成本。
全球最佳解决方案提供全球最小的总成本。
然而,全球最佳调度方案是不切实际的,因为它假设在白天的所有EV和基础负载的到达的抵达是预先已知的。
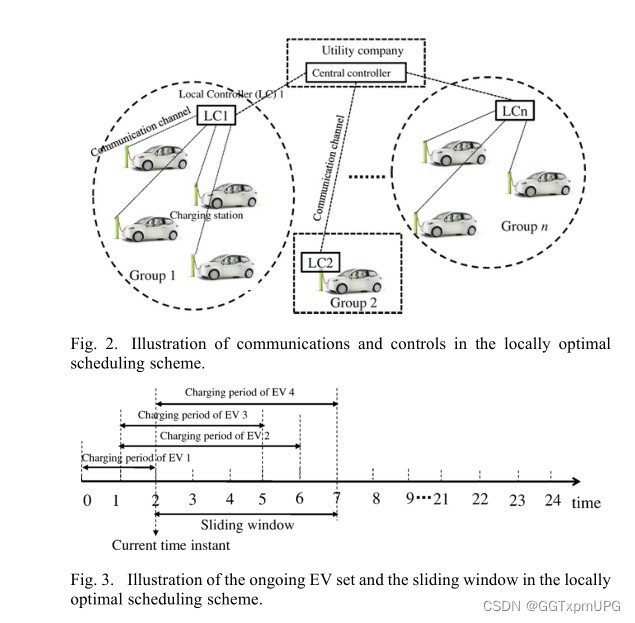
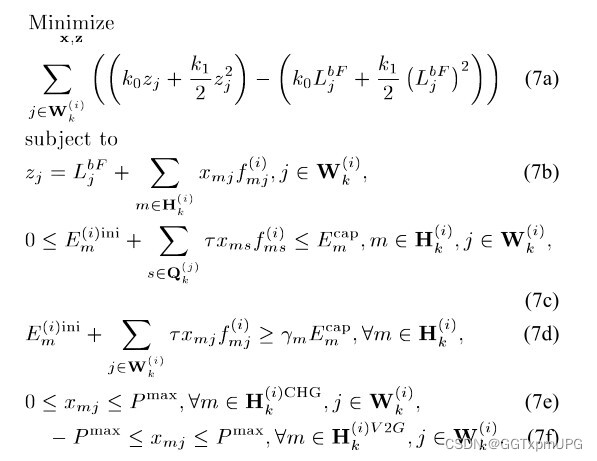
要开发实际的调度方案,我们制定了本地调度优化问题,旨在最大限度地减少当前组中当前正在进行的EV中的EV的总成本。
局部最佳的调度方案以独立和分布的方式执行,其不仅可以扩展到大的EV群体,而且还适用于动态EV抵达。
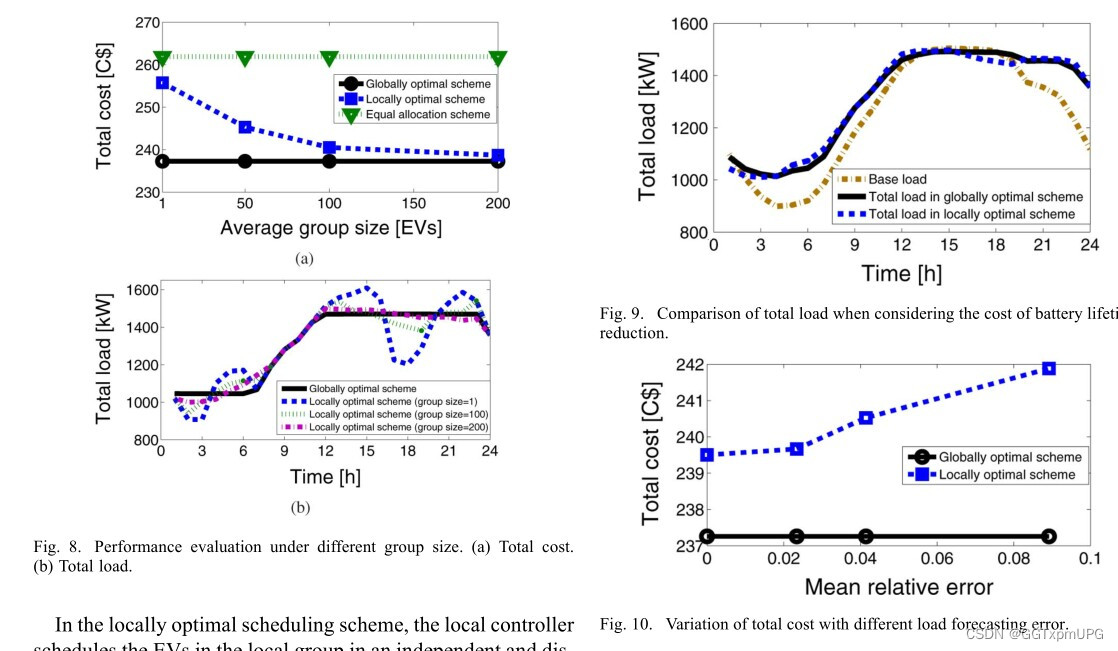
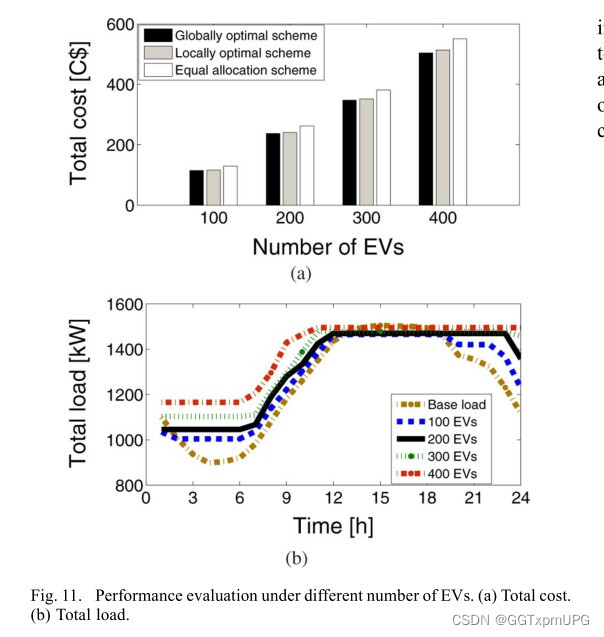
仿真结果表明,与全局最佳调度方案相比,局部最佳调度方案可以实现紧密性能。

电动汽车充放电最优调度
- 引言
随着电动汽车(EV)的普及和需求的增长,有效管理和调度EV的充放电变得越来越重要。本文将研究EV充电和放电的调度优化问题,从全局和本地的角度进行分析和探讨。
- 全局调度优化问题
在全局调度优化问题中,我们的目标是优化充电功率,以最小化在白天执行充电和放电的所有EV的总成本。全球最佳解决方案将提供最小的总成本。然而,全球最佳调度方案在实际应用中存在不切实际的问题,因为它假设在白天所有EV和基础负载的到达时间是预先已知的。
- 本地调度优化问题
为了解决实际应用中的调度问题,我们制定了本地调度优化问题,旨在最大限度地减少当前组中正在进行充电和放电的EV的总成本。局部最佳的调度方案以独立和分布的方式执行,可扩展到大规模的EV群体,并适用于动态EV抵达情况。
- 调度方案的设计和实施
为了实现局部最佳调度方案,我们采取了以下策略和措施:
4.1 预测和调整充电需求:通过分析历史数据和实时监测,我们可以预测出不同时间段的充电需求。根据预测结果,我们可以合理安排充电桩的使用,以便实现最优的充电功率分配。
4.2 引入动态调度算法:考虑到EV的到达时间是动态变化的,我们提出了一种基于动态调度算法的局部最佳调度方案。该算法能够根据实时的EV抵达情况,实时地调整充电和放电策略,以实现最小化总成本的目标。
4.3 集成智能控制系统:通过引入智能控制系统,我们可以实现对充电桩的远程监控和集中管理。智能控制系统可以根据实时的需求和情况对充电桩进行调度和控制,从而提高充电效率和资源利用率。
- 仿真结果和性能评估
通过进行仿真实验,我们对比了全局最佳调度方案和局部最佳调度方案的性能表现。结果显示,局部最佳调度方案可以在实际应用中实现较好的性能,并且能够灵活应对动态的EV抵达情况。与全局最佳调度方案相比,局部最佳调度方案能够更好地满足充电需求和优化总成本。
- 结论
本文研究了电动汽车充放电的最优调度问题,提出了全局调度优化和本地调度优化两种方案。通过合理的设计和实施,局部最佳调度方案可以在实际应用中实现较好的性能,并且能够适应动态的EV抵达情况。未来的研究可以探索更多的调度算法和智能控制策略,以进一步提升充放电调度的效果和效率。
相关代码,程序地址:http://imgcs.cn/lanzoun/644949922994.html















 447
447











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









