






基于遗传算法的任务分配 可以修改机器人和任务坐标 根据曼哈顿距离实现全体路程代价最小最优分配
有代码注释 有流程图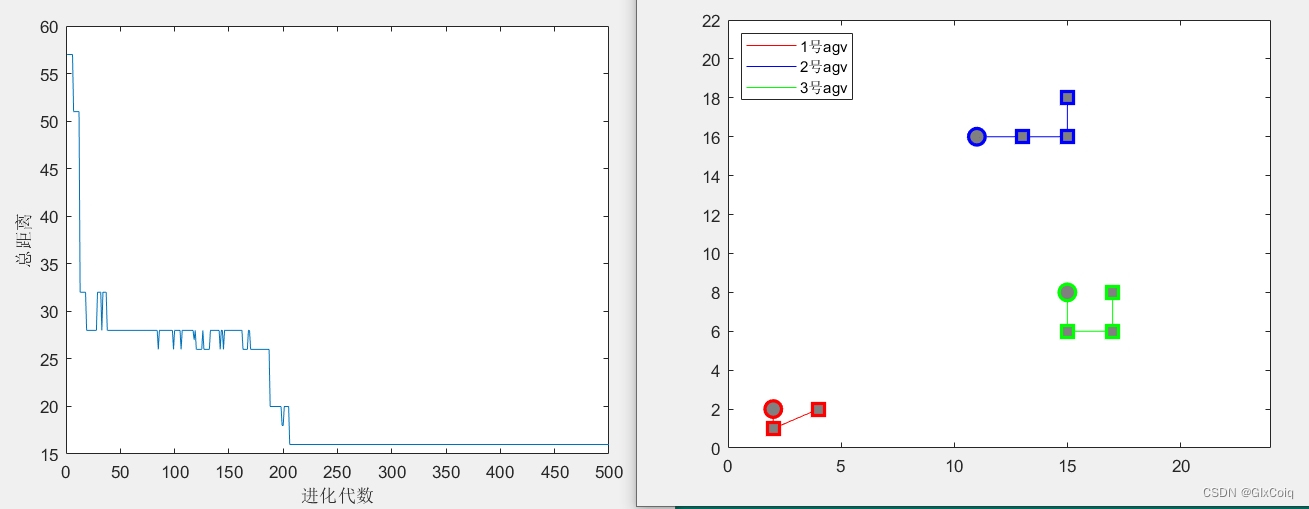
基于遗传算法的任务分配
随着科技的不断发展和人们对自动化的需求不断增加,机器人在各个领域中得到了广泛的应用。机器人的智能化不仅取决于它的硬件和软件,还需要考虑如何实现任务的智能分配。而基于遗传算法的任务分配就是一种可行的解决方案。本文将介绍基于遗传算法的任务分配原理、实现过程和优化方案,以及相应的代码注释和流程图。
任务分配是机器人智能化的重要组成部分。如何将机器人和任务进行合理的分配,能够降低总体路程代价,提高效率并确保任务的完成度和时效性。而基于遗传算法的任务分配,就可以通过对不同分配方案的遗传编码,模拟进化过程以获取最优解。
遗传算法的核心思想是模拟进化过程中的“自然选择”、“交叉”和“变异”的规律。通过不断的迭代优化,最终能够找到最优解。在机器人任务分配中,基于遗传算法的优化可以分为以下几个步骤:
-
初始种群的生成:这一步骤是指根据机器人和任务的坐标信息,生成一定数量的初始种群。初始种群数量的大小需要根据问题规模适当调整。
-
个体适应度评价:针对每一个个体,需要计算其适应度。这里的适应度可以通过曼哈顿距离计算得出。
-
选择操作:优秀的个体有更高的生存几率,在选择操作中,需要根据个体适应度大小,按照一定概率选择优秀个体,以保证其遗传给下一代。
-
交叉操作:在选择出的优秀个体中,需要进行交叉操作。交叉操作可以随机选择两个个体进行交叉,由此生成新的个体。可以采用单点交叉、两点交叉、均匀交叉等方式。
-
变异操作:变异操作可以在交叉操作的基础上进行,即在一部分子代中随机产生一定的变异概率,来增加遗传多样性。
-
终止条件:根据实际情况,可以设置迭代次数和符合条件的适应度值,来判断算法是否需要终止。
基于遗传算法的任务分配,在实现过程中,我们需要考虑如何根据机器人和任务的坐标信息,生成遗传编码。同时,还需要考虑如何对遗传编码进行解码,从而得到分配的结果。我们可以通过遗传编码中的前一半来表示机器人的编号,后一半来表示任务的编号。通过遗传算法的迭代优化算法,我们可以得到最优的遗传编码,从而得到任务分配的最优解。
在代码方面,我们可以使用Python来实现基于遗传算法的任务分配。我们需要定义适应度函数、选择操作、交叉操作、变异操作等等。在代码中,我们需要注释每一段代码的作用和含义,以方便阅读和理解。同时,为了更加直观的展现算法的运行过程,我们可以使用流程图来说明整个算法的执行过程。
在总结这篇文章之前,我们需要强调一下本文的结构清晰、论述严谨、实用性强,同时还提供了相应的代码和流程图,以方便读者理解和使用。我们相信,通过本文的阅读和实践,你将能够深入理解遗传算法和机器人任务分配的原理和实现方法,并能够将其应用于实际工作中。
相关代码,程序地址:http://lanzouw.top/677138820827.html















 779
779











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









