







今天分享的是机器人系列深度研究报告:《2023机器人灵巧手的分类与商业化应用及未来市场规模分析报告》。
(报告出品方:深度行业分析研究)
报告共计:26页
1 灵巧手是人形机器人重要的运控交互部件,近年来海内外研究进展加速
1.1 灵巧手是机器人的新型末端执行器,在运控交互中起关键作用
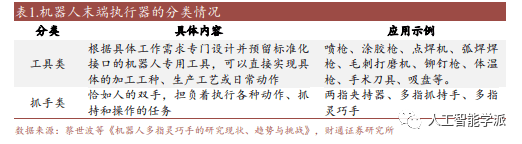
灵巧手是机器人的一种新型末端执行器。一般而言,机器人与环境交互的方式主要包括: 移动行走、视觉等信息的获取、决策的执行输出。末端执行器(End.Effector) 是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
灵巧手以人手的结构和功能为模仿对象,在机器人与环境的交互中起着关键作用。“灵巧”指的是手的姿势可变性,这种可变性越高,则认为手就越灵巧。机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。多指灵巧手最普遍的手指数目为 3-5个,各手指具有 3个关节,手指关节的运动副都是采用转动副。
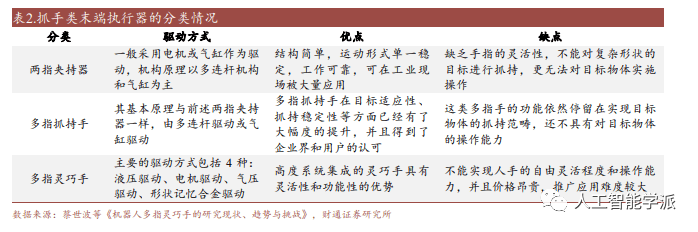
两指央持器:是抓持物体进而操控物体的装置,模仿的是手指的央持运动。它能够在执行某些动作的同时央住和松开目标物体。应用于机器人的末端央持器一般采用电机或气缸作为驱动,机构原理以多连杆机构和气缸为主。例如德SCHUNK 公司的气动平行爪央持器、FESTO 公司的气动夹持器、亚德客手指气缸等。

多指抓持手:一般为三指或者四指抓持手,主要包括联动型抓持手、多关节手指抓持手、软体多指抓持手等,其基本原理与前述两指央持器一样,由多连杆驱动或气缸驱动实现多指的同步运动。例如 Righthand Robotics 公司的 ReFlexTakkTile三指手、苏州钧舵机器人有限公司的均巧三指手、德国 SCHUNK 公司的 3-fingergripper hand SDH 等。
多稽灵巧手;机构形式是多指多关节,并且最普遍的是手指数目为 3~5 个,各手指具有 3 个关节,手指关节的运动副都是采用转动副。灵巧手主要的驱动方式包括4种: 液压驱动、电机驱动、气压驱动、形
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









