







Dijkstra求解最短路径

有一无向带权图,求解顶点V1到其他各顶点的最短路径。
实现代码
#include <iostream>
#include <vector>
#include <unordered_set>
using namespace std;
struct edge {
int start;//起点
int end;//终点
int distance;//距离 (边权)
edge(int s, int e, int d) :start(s), end(e), distance(d) {}
};
void init(vector<edge>& edges, vector<vector<int>>& inf);
void Dijkstra(vector<vector<int>>& inf, int fir, int& n);
void findPath(vector<pair<int, int>> path, vector<vector<int>>& inf, int fir, int& n);
//初始化邻接矩阵
void init(vector<edge>& edges, vector<vector<int>>& inf) {
edges.push_back(edge(0, 1, 20));
edges.push_back(edge(1, 2, 9));
edges.push_back(edge(2, 3, 5));
edges.push_back(edge(3, 4, 4));
edges.push_back(edge(4, 5, 28));
edges.push_back(edge(5, 0, 23));
edges.push_back(edge(6, 0, 1));
edges.push_back(edge(6, 1, 4));
edges.push_back(edge(6, 2, 15));
edges.push_back(edge(6, 3, 16));
edges.push_back(edge(6, 4, 25));
edges.push_back(edge(6, 5, 36));
for (int i = 0; i < edges.size(); i++) {
inf[edges[i].start][edges[i].end] = edges[i].distance;
inf[edges[i].end][edges[i].start] = edges[i].distance;
}
}
void Dijkstra(vector<vector<int>>& inf, int fir, int& n) {//求解 fir 点到其他各点的最短路径
unordered_set<int> result;//加入到结果集的点
vector<pair<int, int>> path(n, make_pair(fir, INT_MAX / 2));//路径数组
int cur = fir;//当前正寻找最短路径的点 fir - > cur
path[cur] = make_pair(fir, 0);//到自己的距离为0
result.insert(cur);
for (int i = 1; i < n; i++) {//剩下的n - 1个点都需要得出最短路径(第一个点不需要寻找)
//选择当前状态下最短路径的点作为拓展节点
for (int j = 0; j < n; j++) {
if (inf[cur][j] != 0 && result.find(j) == result.end()) {
//cur 与 j 存在路径 且 该点还未找到最优路径 : 不在结果集中 此时视情况更新j的路径距离
int tmp = inf[cur][j] + path[cur].second;
if (tmp < path[j].second) {
path[j].second = tmp;
path[j].first = cur;
}
}
}
int minimum = INT_MAX;
int next = -1;//用于寻找下一次的拓展节点
for (int k = 0; k < n; k++) {
if (result.find(k) == result.end()) {
if (path[k].second < minimum) {
minimum = path[k].second;
next = k;
}
}
}
cur = next;
result.insert(cur);
}
findPath(path, inf, fir, n);
}
void findPath(vector<pair<int, int>> path,vector<vector<int>>& inf, int fir, int& n) {
for (int i = 0; i < n; i++) {
if (i == fir) continue;
vector<int> curPath;
int cur = i;
while (1) {
curPath.push_back(cur);//将之前的点加入到路径数组中
if (cur == fir)
break;
cur = path[cur].first;//继续向前寻找
}
cout << "\n从V" << fir + 1 << "到V" << i + 1 << "的最短路径为\n";
for (int j = curPath.size() - 1; j >= 1; j--) {
cout << "V" << curPath[j] + 1 << " -> ";
}cout << "V" << curPath[0] + 1;
cout << endl << "距离为" << path[i].second << endl;
}
}
int main() {
int n = 7;
vector<vector<int>> inf(n, vector<int>(n, 0));//临界矩阵
vector<edge> edges;//存储图中各边的信息
init(edges, inf);
Dijkstra(inf, 1, n);
return 0;
}
运行效果

代码重构 2022.8.8
重构内容:
- 清晰命名
- 用类封装数据结构
#include <iostream>
#include <vector>
using namespace std;
static int g_pointNum;
static int g_startPoint;
const int INFINITE = INT_MAX / 2;
struct Edge {
int _start;
int _end;
int _weight;
Edge(int s, int e, int w) :
_start(s), _end(e), _weight(w) {}
};
class Graph {
public:
/*
* @param edges: 传入参数,初始化 _edges
* 为_matrix分配空间,并初始化为 0
*/
Graph(vector<Edge>& edges) :
_edges(std::move(edges)) {
_matrix.reserve(g_pointNum * g_pointNum);
_matrix.resize(g_pointNum);
for (auto& vec : _matrix) {
vec.resize(g_pointNum, INFINITE);
}
}
void InitMatrix();
void Dijkstra();
private:
vector<vector<int>> _matrix;
vector<Edge> _edges;
};
void Graph::InitMatrix() {
for (auto& edge : _edges) {
int start = edge._start;
int end = edge._end;
int weight = edge._weight;
_matrix[start][end] = weight;
_matrix[end][start] = weight;
}
}
void Graph::Dijkstra() {
vector<int> minWeight(g_pointNum, INFINITE); // 记录起点到其他点的最小代价
vector<bool> complete(g_pointNum, false); // 记录已经完成计算的点
minWeight[g_startPoint] = 0;
complete[g_startPoint] = true;
int curPoint = g_startPoint; // 当前的拓展节点
int minWgt = INFINITE; // 记录初始化时的最小值
int nextPoint = 0;
for (int i = 0; i < g_pointNum; ++i) {
int weight = _matrix[curPoint][i];
minWeight[i] = weight;
if (minWgt > weight) {
minWgt = weight;
nextPoint = i; // 保存下一个扩展节点
}
}
// 进行 g_pointNum - 2 轮即可计算出到所有点的最短距离
for (int i = g_pointNum - 1; i > 0; --i) {
curPoint = nextPoint;
minWgt = INFINITE;
for (int j = 0; j < g_pointNum; ++j) {
if (complete[j] || _matrix[curPoint][j] == INFINITE) {
continue;
}
if (minWeight[curPoint] + _matrix[curPoint][j] < minWeight[j]) {
minWeight[j] = minWeight[curPoint] + _matrix[curPoint][j];
}
if (minWgt > minWeight[j]) {
minWgt = minWeight[j];
nextPoint = j;
}
}
complete[nextPoint] = true;
}
for (int i = 0; i < g_pointNum; ++i) {
if(i != g_startPoint)
cout << g_startPoint << " -> " << i <<
" min-weight: " << minWeight[i] << endl;
}
}
int main() {
g_pointNum = 7; // 图拥有的点数量
g_startPoint = 1; // 起点
vector<Edge> edges;
// 图中所有边 V1 ~ V7分别对应索引0 ~ 6
edges.push_back(Edge(0, 1, 20));
edges.push_back(Edge(1, 2, 9));
edges.push_back(Edge(2, 3, 5));
edges.push_back(Edge(3, 4, 4));
edges.push_back(Edge(4, 5, 28));
edges.push_back(Edge(5, 0, 23));
edges.push_back(Edge(6, 0, 1));
edges.push_back(Edge(6, 1, 4));
edges.push_back(Edge(6, 2, 15));
edges.push_back(Edge(6, 3, 16));
edges.push_back(Edge(6, 4, 25));
edges.push_back(Edge(6, 5, 36));
Graph graph(edges);
graph.InitMatrix();
graph.Dijkstra();
return 0;
}
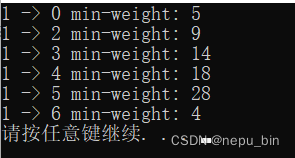
输出结果
















 5394
5394











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











