








mpuiic.c
#include "mpuiic.h"
#include "delay.h"
//MPU IIC 延时函数
void MPU_IIC_Delay(void)
{
delay_us(2);
}
//初始化IIC
void MPU_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //先使能外设IO PORTB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIO
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //PB10,PB11 输出高
}
//产生IIC起始信号
void MPU_IIC_Start(void)
{
MPU_SDA_OUT(); //sda线输出
MPU_IIC_SDA=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SDA=0;//START:when CLK is high,DATA change form high to low
MPU_IIC_Delay();
MPU_IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void MPU_IIC_Stop(void)
{
MPU_SDA_OUT();//sda线输出
MPU_IIC_SCL=0;
MPU_IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_SDA=1;//发送I2C总线结束信号
MPU_IIC_Delay();
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 MPU_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
MPU_SDA_IN(); //SDA设置为输入
MPU_IIC_SDA=1;MPU_IIC_Delay();
MPU_IIC_SCL=1;MPU_IIC_Delay();
while(MPU_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void MPU_IIC_Ack(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
//不产生ACK应答
void MPU_IIC_NAck(void)
{
MPU_IIC_SCL=0;
MPU_SDA_OUT();
MPU_IIC_SDA=1;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void MPU_IIC_Send_Byte(u8 txd)
{
u8 t;
MPU_SDA_OUT();
MPU_IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
MPU_IIC_SDA=(txd&0x80)>>7;
txd<<=1;
MPU_IIC_SCL=1;
MPU_IIC_Delay();
MPU_IIC_SCL=0;
MPU_IIC_Delay();
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 MPU_IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
MPU_SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
MPU_IIC_SCL=0;
MPU_IIC_Delay();
MPU_IIC_SCL=1;
receive<<=1;
if(MPU_READ_SDA)receive++;
MPU_IIC_Delay();
}
if (!ack)
MPU_IIC_NAck();//发送nACK
else
MPU_IIC_Ack(); //发送ACK
return receive;
}
mpuiic.h
#ifndef __MPUIIC_H
#define __MPUIIC_H
#include "sys.h"
//IO方向设置
#define MPU_SDA_IN() {GPIOB->CRH&=0XFFFF0FFF;GPIOB->CRH|=8<<12;}
#define MPU_SDA_OUT() {GPIOB->CRH&=0XFFFF0FFF;GPIOB->CRH|=3<<12;}
//IO操作函数
#define MPU_IIC_SCL PBout(10) //SCL
#define MPU_IIC_SDA PBout(11) //SDA
#define MPU_READ_SDA PBin(11) //输入SDA
//IIC所有操作函数
void MPU_IIC_Delay(void); //MPU IIC延时函数
void MPU_IIC_Init(void); //初始化IIC的IO口
void MPU_IIC_Start(void); //发送IIC开始信号
void MPU_IIC_Stop(void); //发送IIC停止信号
void MPU_IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 MPU_IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 MPU_IIC_Wait_Ack(void); //IIC等待ACK信号
void MPU_IIC_Ack(void); //IIC发送ACK信号
void MPU_IIC_NAck(void); //IIC不发送ACK信号
void IMPU_IC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 MPU_IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
mpu6050.c
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "oled.h"
// 函数功能:初始化DMP并显示错误原因
void DMP_Init(void)
{
int i=1;
int dmp_error; //记录dmp错误原因
OLED_ShowStr(0,4,"DMP ing...",1);
OLED_ShowStr(0,5,"Attempts:",1); //尝试次数
OLED_ShowStr(0,6,"Error:",1); //错误原因
while(dmp_error = mpu_dmp_init())//DMP初始化(此处报warning不用管)
{
OLED_ShowNum(60,5,i++,1);
OLED_ShowNum(42,6,dmp_error,1);
delay_ms(200);
}
OLED_ShowStr(0,4,"DMP OK! ",1);
delay_ms(1000);
OLED_Clear(); //清屏
}
u8 MPU_Init(void)
{
u8 res;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能AFIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //先使能外设GPIOA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//禁止JTAG,从而PA15可以做普通IO使用,否则PA15不能做普通IO!!!
MPU_AD0_CTRL=0; //控制MPU6050的AD0脚为低电平,从机地址为:0X68(7位)
//初始化陀螺仪的IIC总线:
MPU_IIC_Init();
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}
else
{
OLED_ShowStr(0,2,"MPU6050 err",1);
return 1;
}
OLED_ShowStr(0,2,"MPU6050 OK!",1);
delay_ms(50);
return 0;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{
u8 buf[2];
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
raw=((u16)buf[0]<<8)|buf[1];
temp=36.53+((double)raw)/340;
return temp*100;;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
if(res==0)
{
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6],res;
res=MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
if(res==0)
{
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}
return res;;
}
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data);//发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}
mpu6050.h
#ifndef __MPU6050_H
#define __MPU6050_H
#include "mpuiic.h"
#include "mpuexti.h"
//MPU6050 AD0控制脚
#define MPU_AD0_CTRL PAout(15) //控制AD0电平,从而控制MPU地址
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68
因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2)
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
u8 MPU_Init(void); //初始化MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC写一个字节
u8 MPU_Read_Byte(u8 reg); //IIC读一个字节
u8 MPU_Set_Gyro_Fsr(u8 fsr);
u8 MPU_Set_Accel_Fsr(u8 fsr);
u8 MPU_Set_LPF(u16 lpf);
u8 MPU_Set_Rate(u16 rate);
u8 MPU_Set_Fifo(u8 sens);
short MPU_Get_Temperature(void);
u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az);
void DMP_Init(void);
#endif
exti.c
#include "mpuexti.h"
#include "sys.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "OLED.h"
#include "delay.h"
float pitch,roll,yaw; //欧拉角原始数据
//函数功能:初始化接收陀螺仪中断的引脚
void MPU_exti_init()
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PA12
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource12); //将PA12映射到中断线12
EXTI_InitStructure.EXTI_Line=EXTI_Line12;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //响应优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
//外部中断线12服务程序(10ms中断)
void EXTI15_10_IRQHandler(void)
{
if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0)
{
//此时欧拉角已更新,存在pitch,roll,yaw里面
}
EXTI_ClearITPendingBit(EXTI_Line12); //清除LINE上的中断标志位
}
exti.h
#ifndef __MPUEXTI_H
#define __MPUEXTI_H
void MPU_exti_init(void);
#endif
main.c
/********************************************************************
程序:mpu6050例程
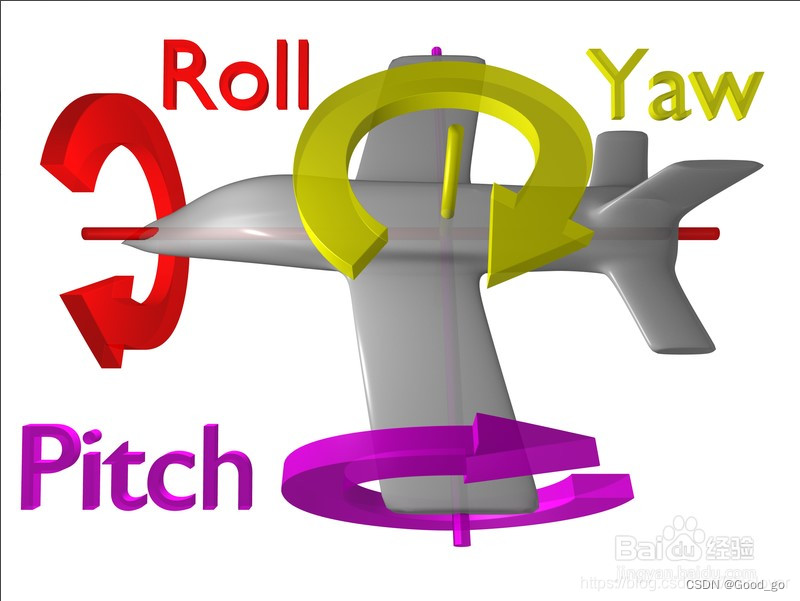
功能介绍:在oled显示mpu6050计算出来的欧拉角
pitch:俯仰角 精度:0.1° 范围:-90.0° <---> +90.0°
roll:翻滚角 精度:0.1° 范围:-180.0°<---> +180.0°
yaw:方位角 精度:0.1° 范围:-180.0°<---> +180.0
硬件连接:
a.oled:
1.SCL:PB6
2.SDA:PB7
b.mpu6050:
1.SCL:PB10
2.SDA:PB11
3.INT:PA12(下降沿中断)
4.AD0:PA15(给低电平,或悬空)
*********************************************************************/
// 第一种使用方式:不用中断(初学可以用一下,以后不推荐)
#include "delay.h"
#include "sys.h"
#include "OLED.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
int main(void)
{
float pitch,roll,yaw; //欧拉角原始数据
delay_init(); //延时函数初始化
OLED_Init(); //oled初始化
MPU_Init(); //MPU6050初始化
DMP_Init(); //DMP初始化(DMP用来解算陀螺仪数据)
OLED_ShowStr(0,0,"Pitch: ",2);
OLED_ShowStr(0,2,"Roll: ",2);
OLED_ShowStr(0,4,"Yaw: ",2);
//不断地读取陀螺仪角度并显示
while(1)
{
if(mpu_dmp_get_data(&pitch, &roll, &yaw)==0) //得到了欧拉角,存在pitch,roll,yaw里面
{
OLED_ShowAngle(pitch, roll, yaw); //oled显示角度
}
}
}
/
//第二种使用方式:用中断(陀螺仪的INT引脚会在读取到欧拉角后输出中断信号)
//#include "delay.h"
//#include "sys.h"
//#include "OLED.h"
//#include "mpu6050.h"
//#include "inv_mpu.h"
//#include "inv_mpu_dmp_motion_driver.h"
//extern float pitch,roll,yaw; //欧拉角原始数据(在mpuexti.c定义)
//int main(void)
//{
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //2位抢占优先级,2位响应优先级
// delay_init(); //延时函数初始化
// OLED_Init(); //oled初始化
// MPU_Init(); //MPU6050初始化
// DMP_Init(); //DMP初始化(DMP用来解算陀螺仪数据)
// MPU_exti_init(); //陀螺仪外部中断初始化(放最后)
//
//
// OLED_ShowStr(0,0,"Pitch: ",2);
// OLED_ShowStr(0,2,"Roll: ",2);
// OLED_ShowStr(0,4,"Yaw: ",2);
//
// //陀螺仪角度的读取在外部中断服务函数中进行,此处仅进行oled显示
// while(1)
// {
// OLED_ShowAngle(pitch, roll, yaw); //oled显示角度
// }
//}
链接:https://pan.baidu.com/s/1rWQxlphDvYPfJ6YFZQja2Q?pwd=1234 提取码:1234

















 12万+
12万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











