






一
MATLAB里ode45命令用4阶龙格-库塔解一阶微分方程
% di/dt = L-1u - L-1(WL+R)i
function iprime = hw11_2(t,i)
L = [.0072, 0, 0, .1, .0054, 0;
0, .007, 0, 0, 0, .0026;
0, 0, .001, 0, 0, 0;
1.5*.1, 0, 0, 2.5, .125, 0;
1.5*.0054, 0, 0, .125, .0068, 0;
0, 1.5*.0026, 0, 0, 0, .0016];
W = zeros(6,6);
W(1,2) = -100pi;
W(2,1) = 100pi;
R = diag([.002,.002,.002,.4,.015,.015]);
u = zeros(6,1);
u(4) = 400;
iprime = L\u - L(W*L+R)*i;
主程序文件:调用ode45
% solve function hw11_2
theta0 = 0;
h = 1e-3; % step
i0 = zeros(1,6);
i0(4) = 400/.4;
ts = 0:h:1; % time span
[t,i] = ode45(‘hw11_2’,ts,i0); % solve
thetaA = 100pits + theta0;
thetaB = thetaA - pi/32;
thetaC = thetaA + pi/32;
n = length(ts);
ia = zeros(n,1);
ib = zeros(n,1);
ic = zeros(n,1);
% inverse Park transform
for j = 1:n
tt = ts(j);
thetaA = 100pitt + theta0;
thetaB = thetaA - 2pi/3;
thetaC = thetaA + 2pi/3;
ia(j) = cos(thetaA)*i(j,1) - sin(thetaA)*i(j,2) + i(j,3);
ib(j) = cos(thetaB)*i(j,1) - sin(thetaB)*i(j,2) + i(j,3);
ic(j) = cos(thetaC)*i(j,1) - sin(thetaC)*i(j,2) + i(j,3);
end
figure(1);
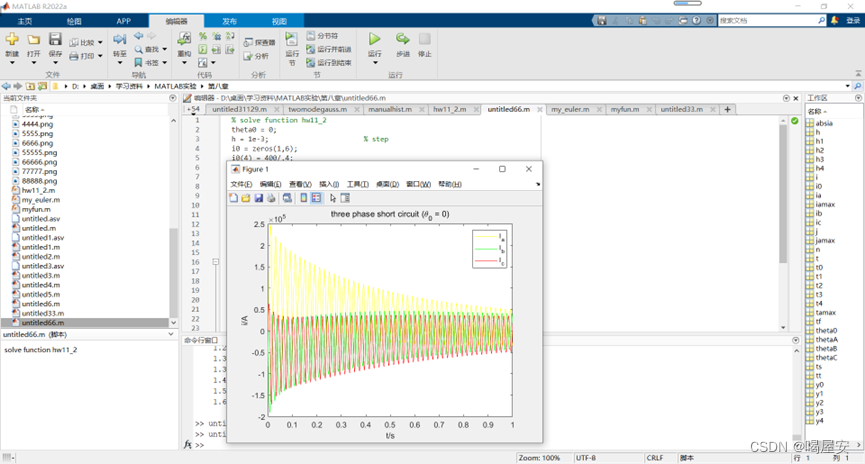
plot(ts,ia,‘y’,ts,ib,‘g’,ts,ic,‘r’);
title([‘three phase short circuit (\theta_0 = ‘,num2str(theta0),’)’]);
xlabel(‘t/s’);ylabel(‘i/A’);
legend(‘I_a’,‘I_b’,‘I_c’);
absia = abs(ia);
[iamax,jamax] = max(absia);
tamax = ts(jamax);
二
%欧拉方法求解微分方程
function [t,y] = my_euler(f, t0, tf , y0, h)
%f-函数; t0,tf:区间; y0,初值;h 步长
M = floor((tf - t0)/h); % 离散点的个数
t = zeros(M +1, 1);
y = zeros(M +1, 1);
t = [t0 : h :tf]';
y(1) = y0;
for i =1:M
y(i+1) = y(i) + h*feval(f, t(i), y(i));
end
function s = myfun(t,y)
s = 1/2*(t - y);
end
clear all;clc
%调用欧拉方法求解微分方程-
%函数原型 function [t,y] = my_euler(f, t0, tf , y0, h)
t0 = 0;tf = 3;
y0 = 1;
h1 = 1; h2 = 0.5; h3 = 0.25; h4 = 1/8;
[t1,y1] = my_euler(@myfun, t0, tf , y0, h1)
[t2,y2] = my_euler(@myfun, t0, tf , y0, h2)
[t3,y3] = my_euler(@myfun, t0, tf , y0, h3)
[t4,y4] = my_euler(@myfun, t0, tf , y0, h4)
plot(t1,y1,‘b>’,t2,y2,‘y*’ ,t3,y3,‘ro’,t4,y4,‘g–’);hold on;
xlabel(‘t’);ylabel(‘y’);grid on;
legend(‘h=1’, ‘h=1/2’,‘h=1/4’,‘h=1/8’);
plot(t4, 3*exp(-t4/2) - 2 +t4);
%第二种写法
% myfun1 = @(t,y)1/2*(t - y)
% [t,y1] = my_euler(myfun1, t0, tf , y0, h1)
% [t,y2] = my_euler(myfun1, t0, tf , y0, h2)
% [t,y3] = my_euler(myfun1, t0, tf , y0, h3)
% [t,y4] = my_euler(myfun1, t0, tf , y0, h4)
结果如下:
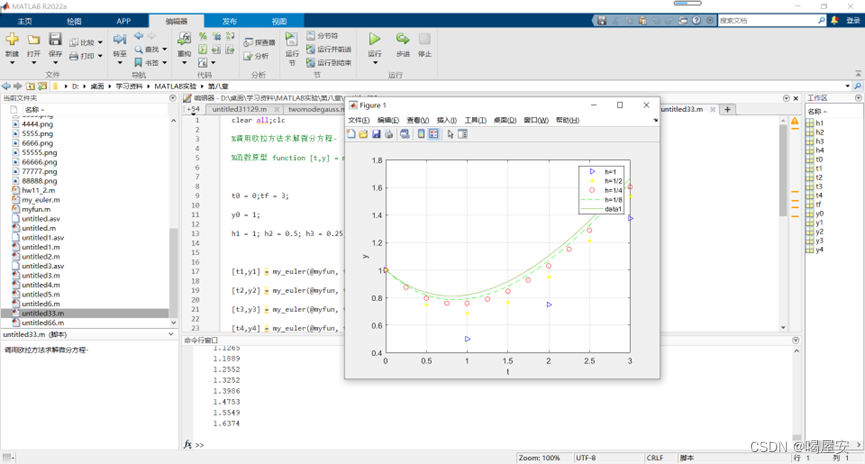
结论:可以看出,随着步长的减小,通过欧拉方法得到的微分方程的解,更加接近精确解。















 916
916











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









