






1985年由德国鲁尔大学Depenbrock教授首次提出直接转矩的理论,并于1987年将其推广到弱磁调速范围。不同于矢量控制技术,直接转矩控制有自身的优点,鲁棒性好。直接转矩技术的诞生,迅速用于各类电机控制策略上。
下面使用Simulink和Matlab的脚本文件联合仿真实现直接转矩控制磁链六边形控制。
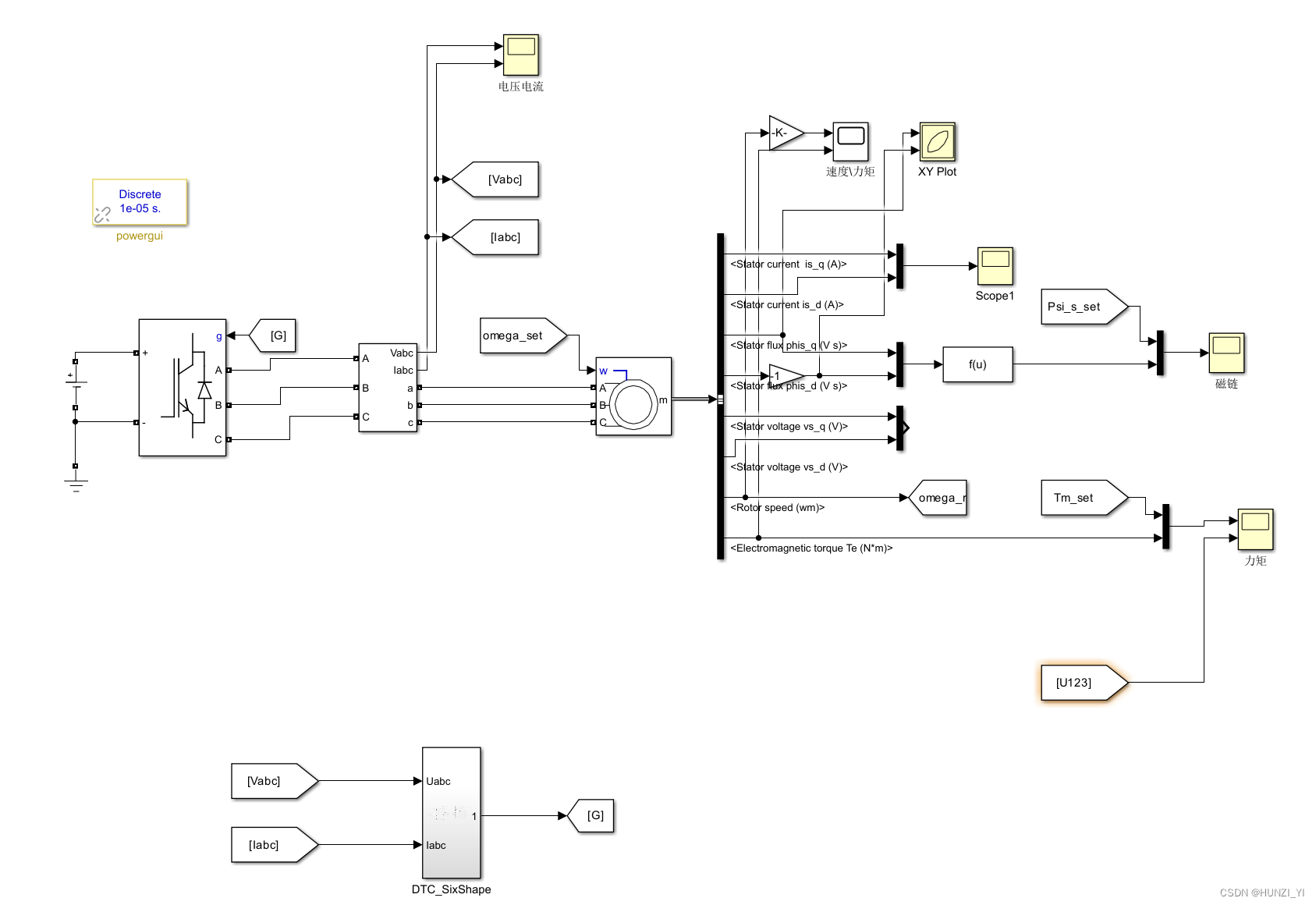
其中六边形中采用力矩滞环和磁链滞环,通过S函数编写Matlab脚本,完成IGBT的开断。具体算法和细节可见相关论文,在此不再赘述。
注意的点如下:
1、如果磁链幅值需要从低值励磁到高值,需要自己编写S函数实现动态滞环功能。
2、常称磁链2/3变换为“磁链2/3坐标系变换”,这是具有误导性的,磁链2/3过程是讲αβ轴上的磁链矢量投影到ψabc三轴上,是“投影值”概念而不是“坐标值”,具体解释可见我之前发的一篇文章:
理解这一点,对理解开关顺序很有帮助。
下面是仿真结果:
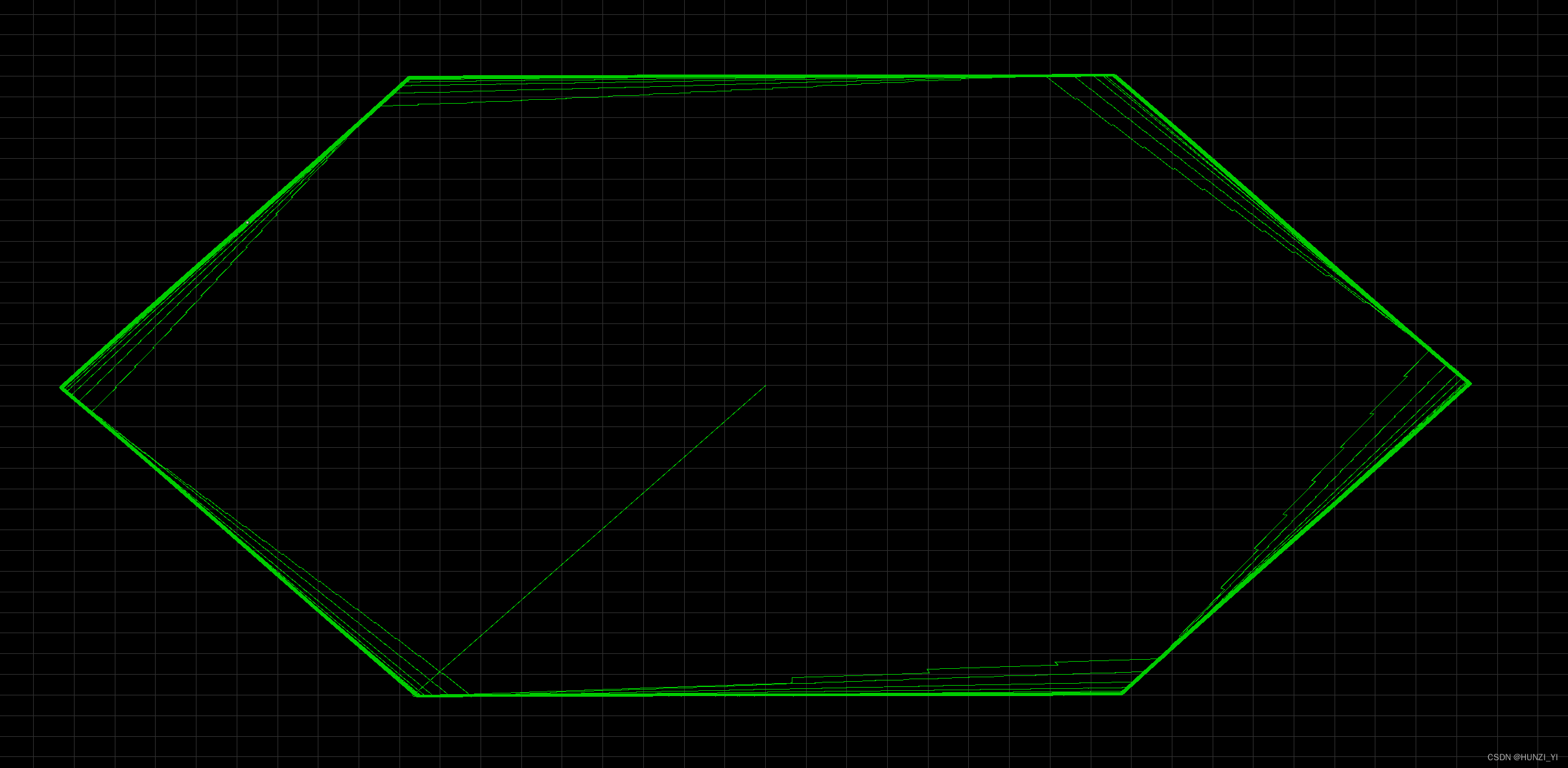
开始时磁链为0,励磁上去后磁链碰到阈值做六边形旋转。















 610
610











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









