







学会Simulink是每一个搞机器人控制的人必须掌握的工具,它不仅能做仿真分析,还能做半实物原型样机搭建,大大加快开发速度,提升开发效率。
前言
我的Matlab版本:64位R2016a
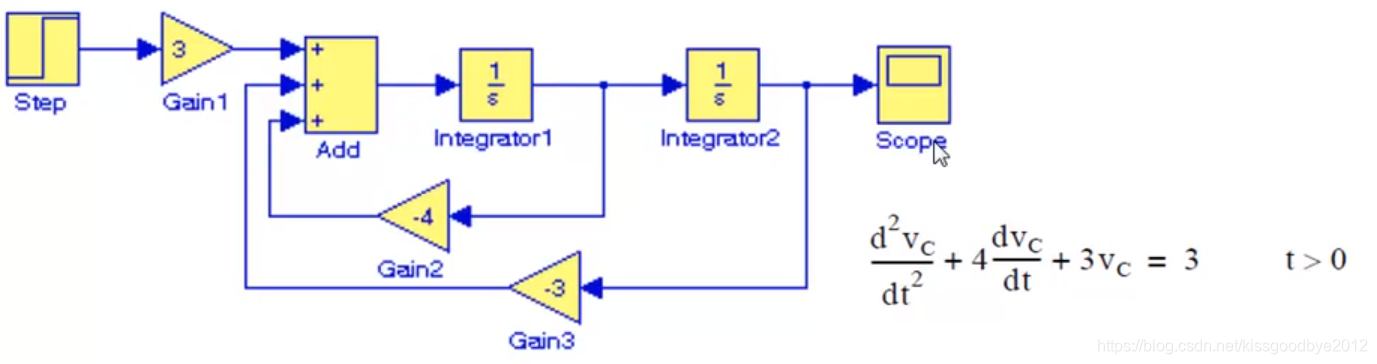
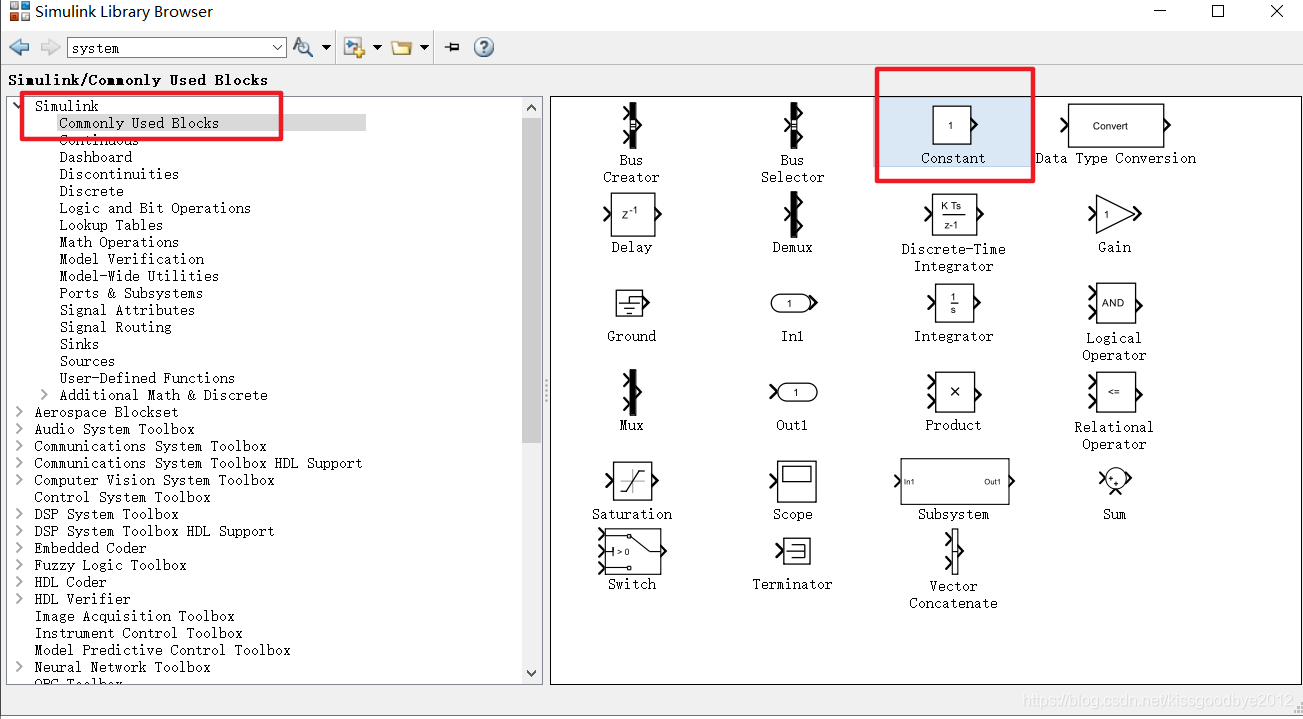
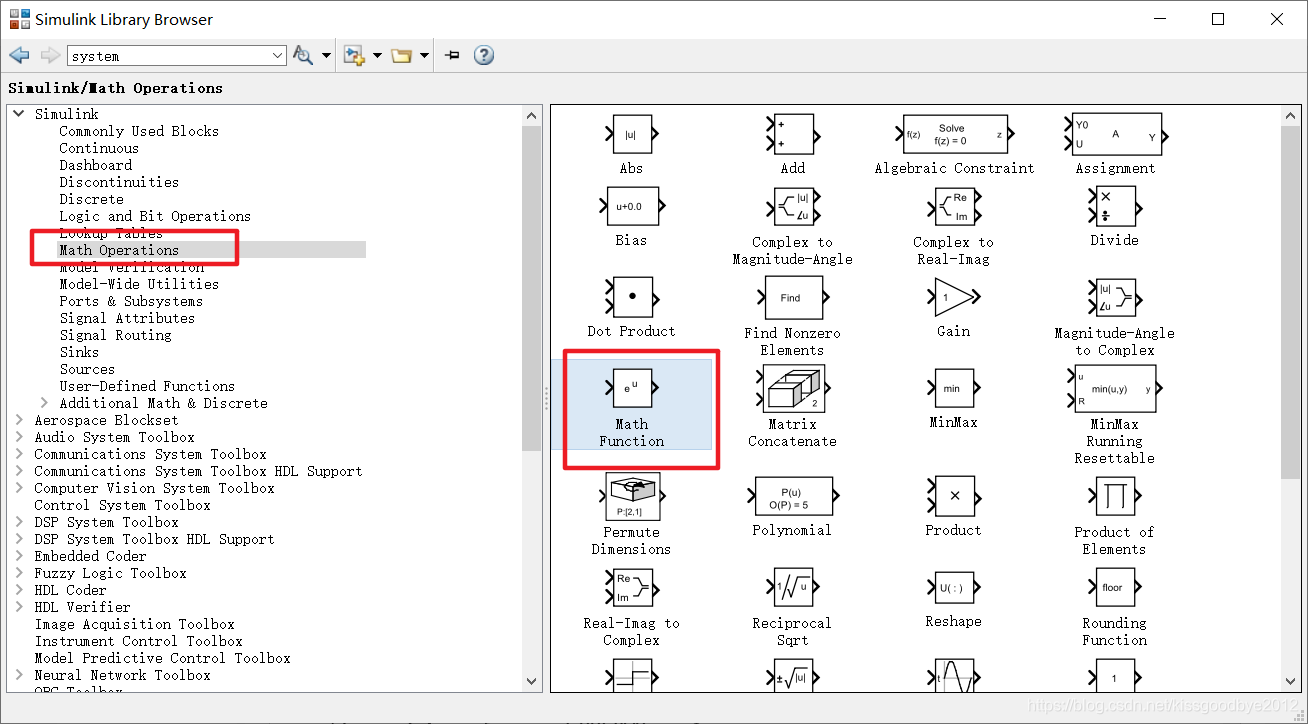
1.Simulink的模块构成

2.常用基本控件使用
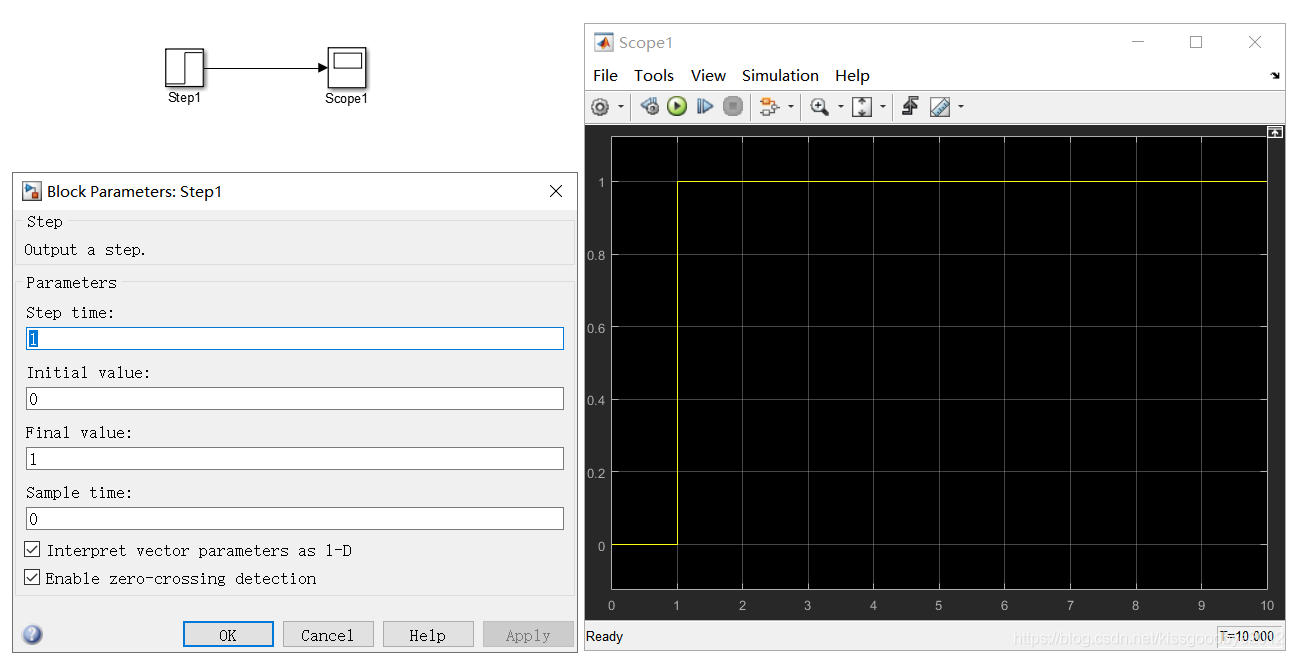
2.1 阶跃信号源
阶跃信号源Step如下图所示。Step time是阶跃时间,Initial value是初始值,Final value是最终值,Sample time指的是采样时间,是系统进行仿真所取得时间间隔,一般选默认设定,大多数情况下不需要特殊设定。
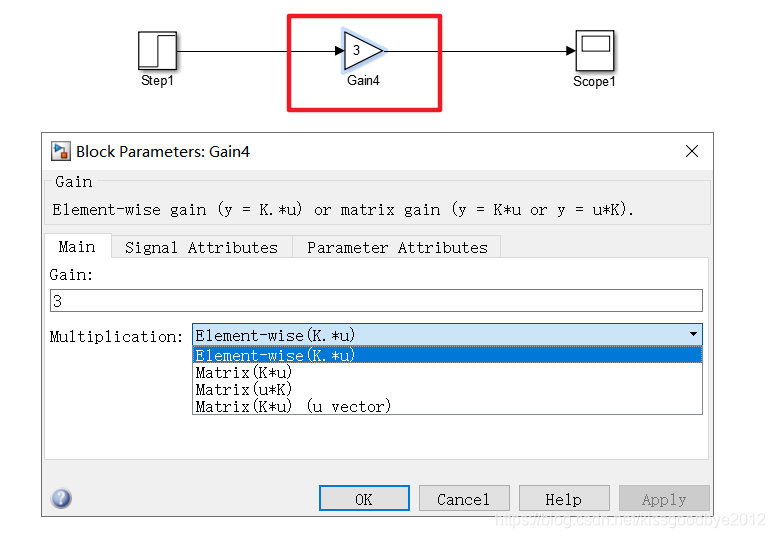
2.2 增益放大
增益放大模块Gain如下图红色框所示。可以选择Element-wise,作为标量使用;可以选择Matrix,作为矩阵使用,分别为坐成增益,右乘增益以及矩阵是向量的左乘增益。
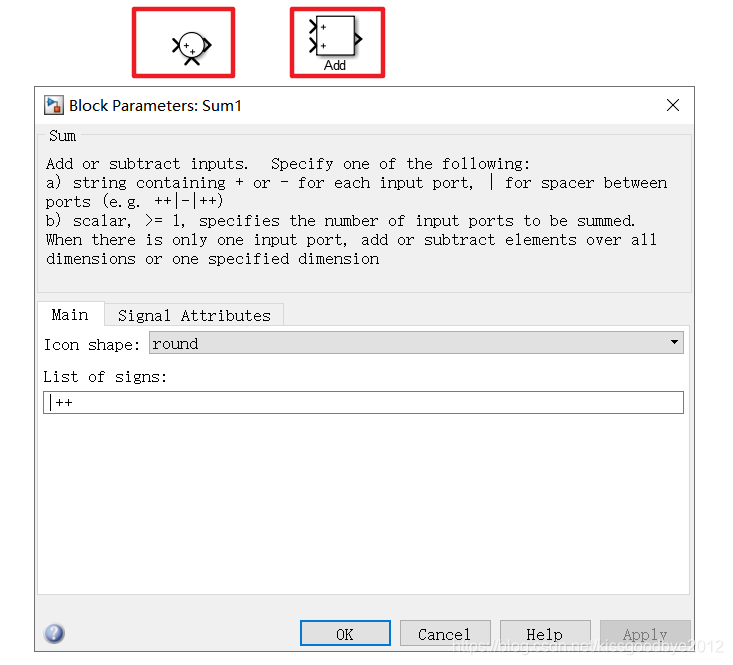
2.3 加减乘除运算
加法有两种形状,如下图所示。通过Icon shape可以进行选择;List of signs是加法的输入参数个数,几个加号代表几个输入参数,可以通过增加和删除加号来控制输入参数个数。
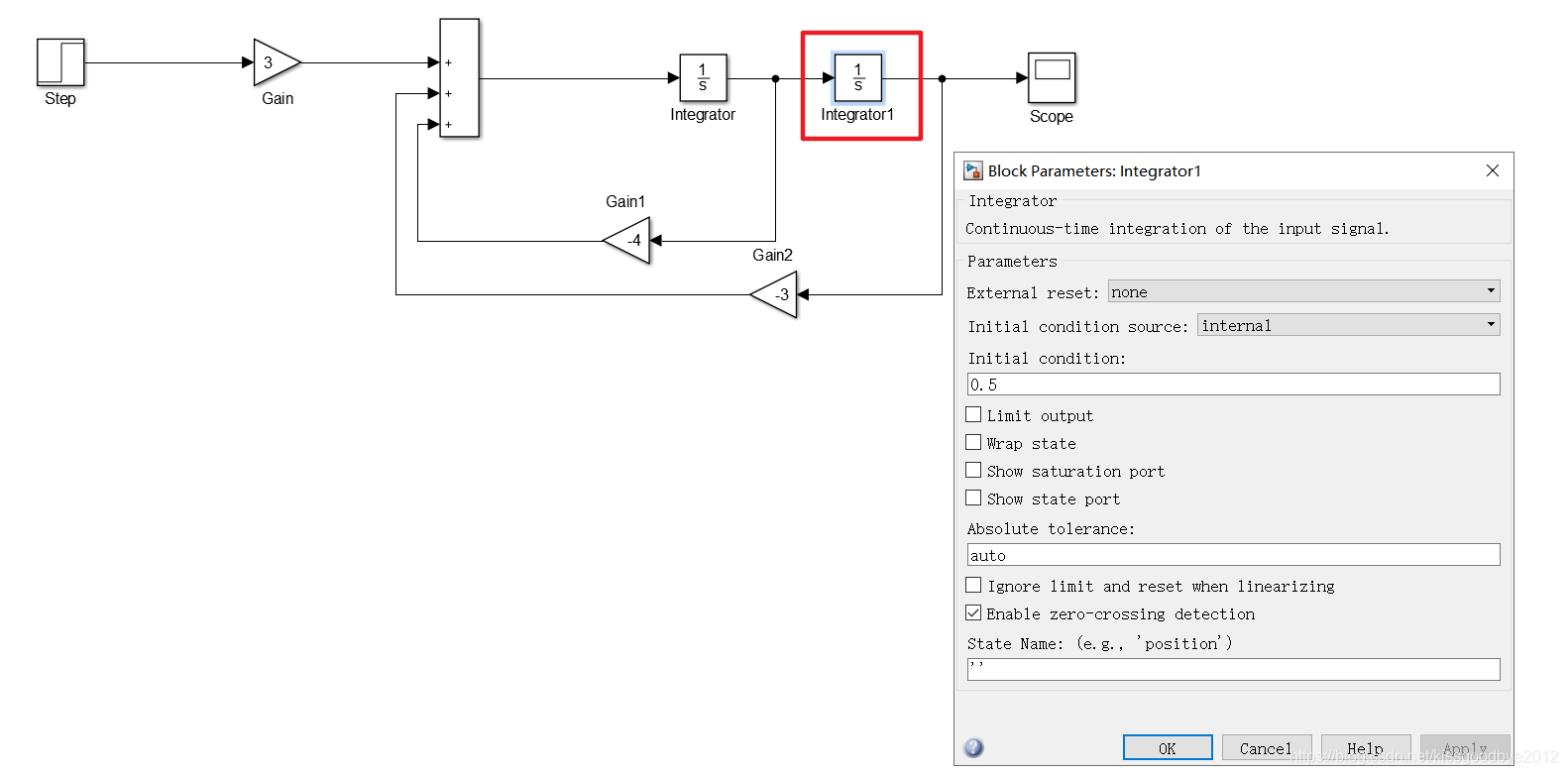
2.4 积分微分运算
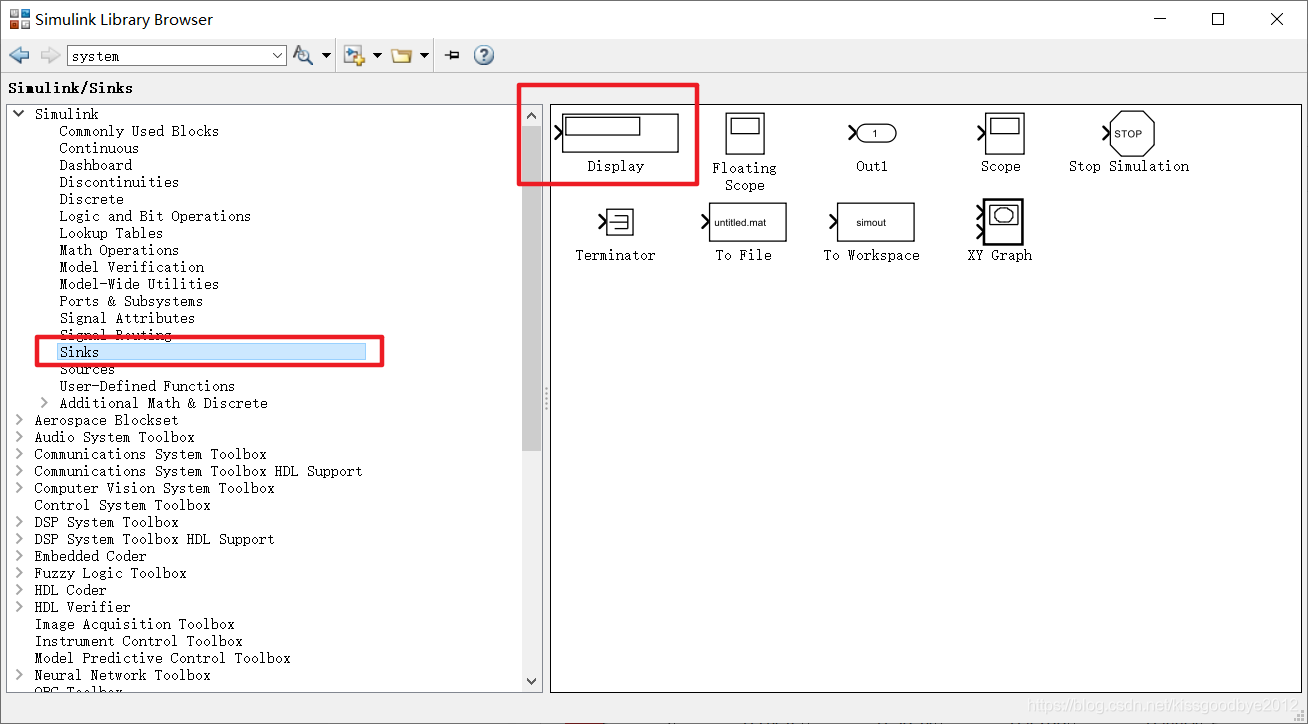
2.5 显示控件
Scope是示波器控件,输出图像如下图黑色框所示。
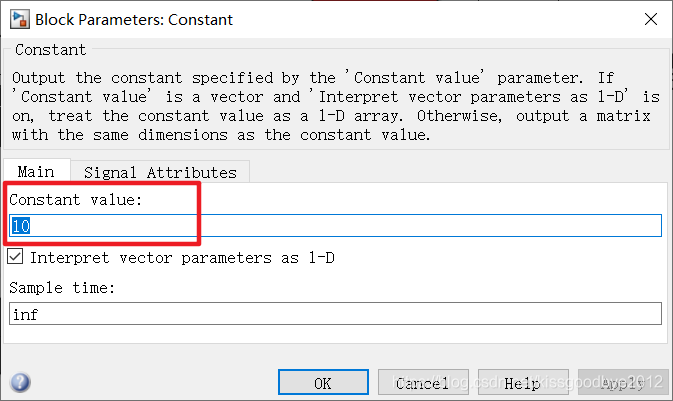
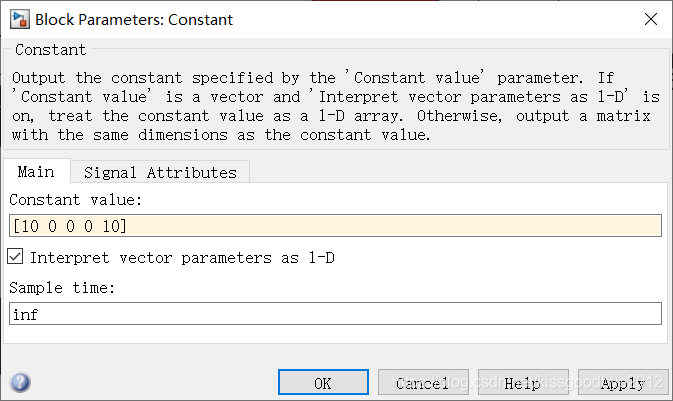
2.6 常数模块
它的参数可以是一个常数,也可以是一个数组。
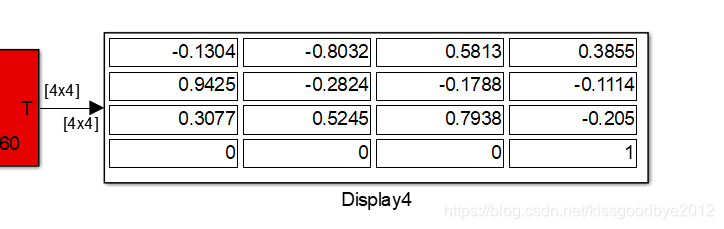
2.7 数组显示模块
可以显示数组,需要拉大框才能知道是几维数组。
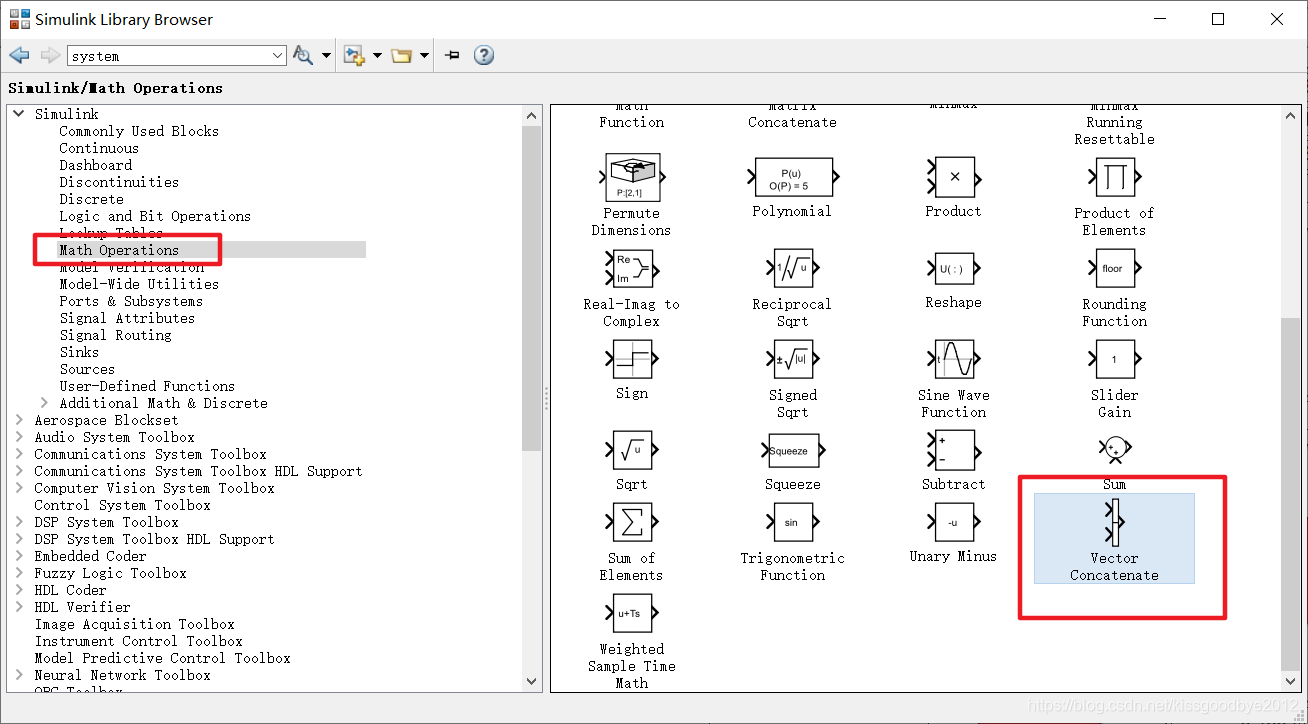
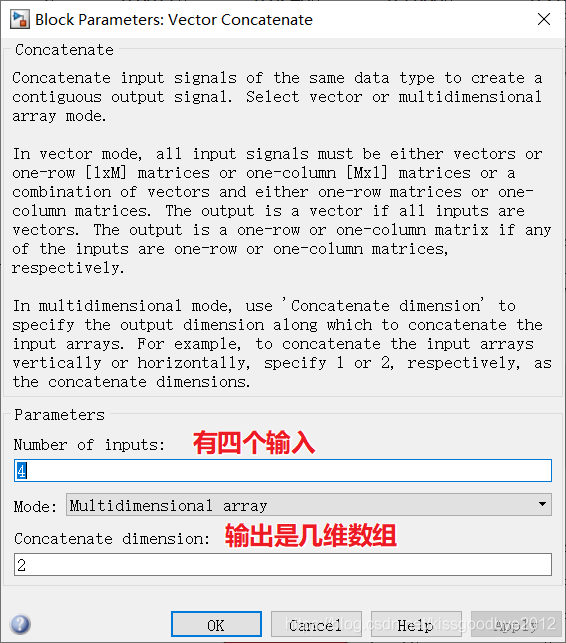
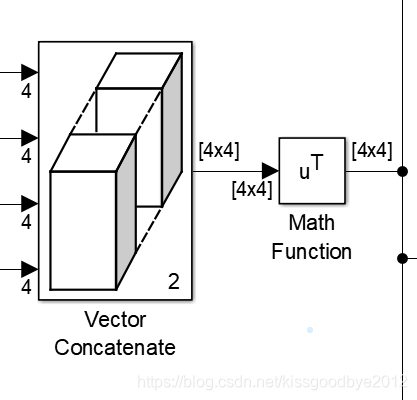
2.8 向量合并为数组
可以将Vector合并为数组。要输出几维数组就输入几。

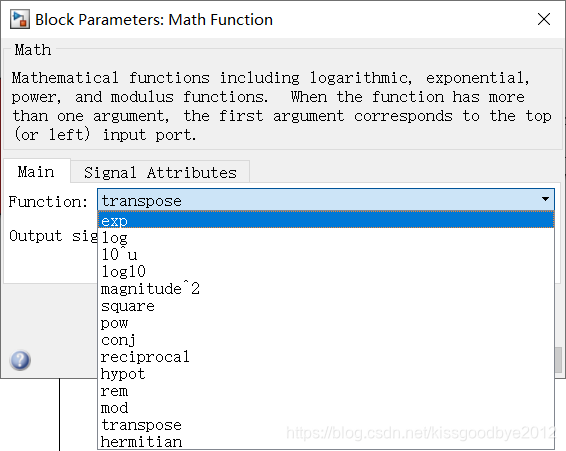
2.9 矩阵操作
常用的矩阵操作见下面的属性列表。
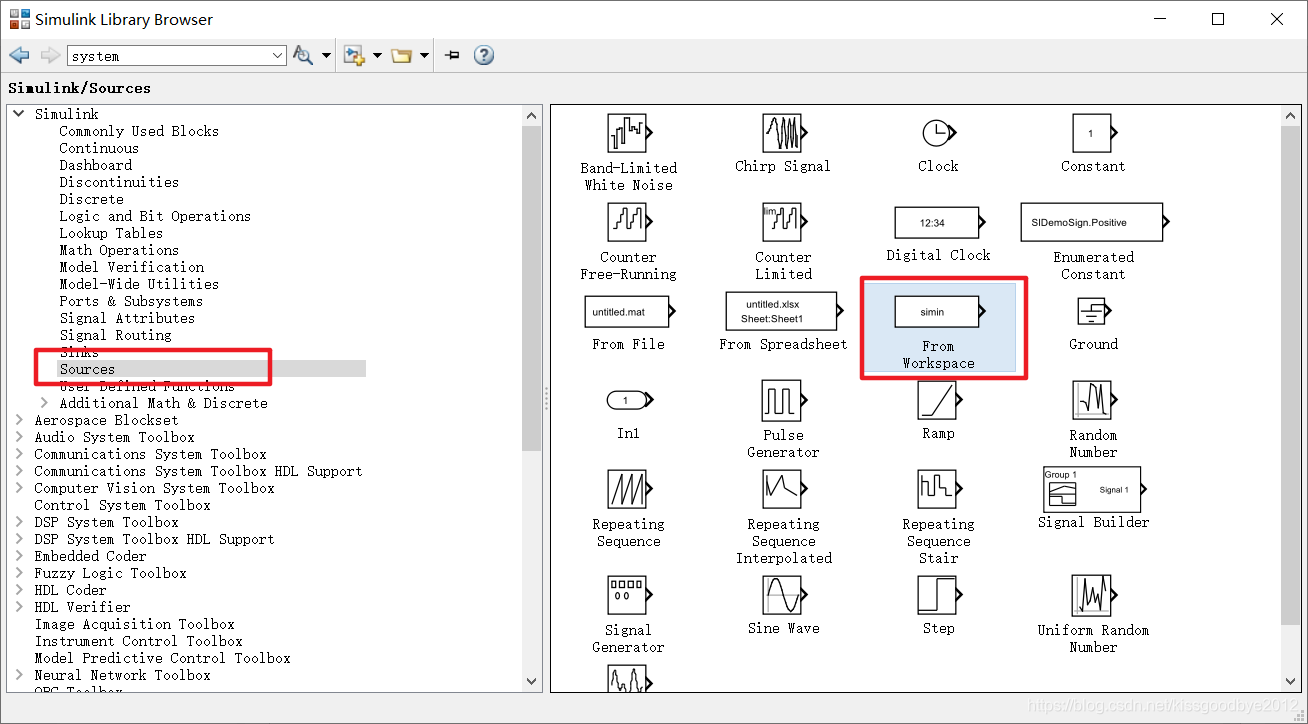
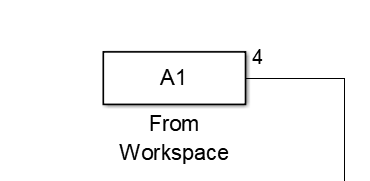
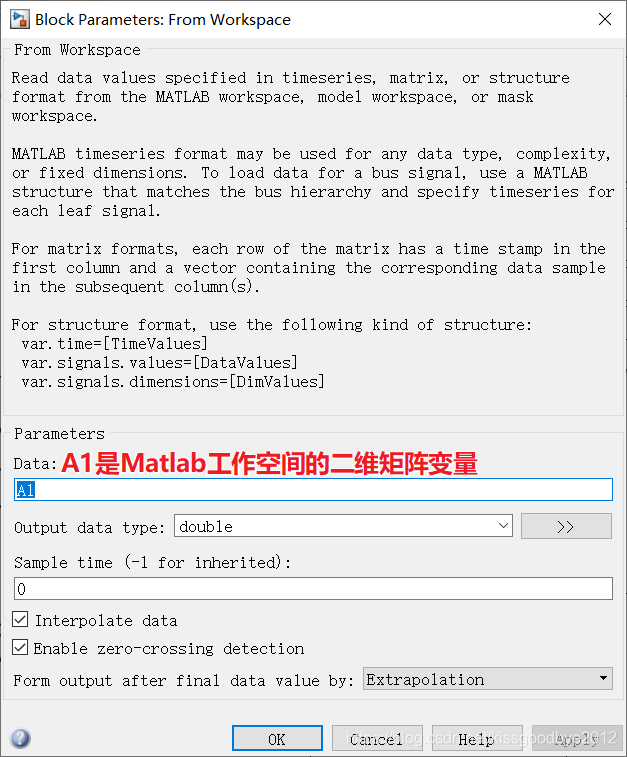
2.10 从Matlab工作空间输入矩阵数据
对工作空间的输入矩阵,需要知道的:
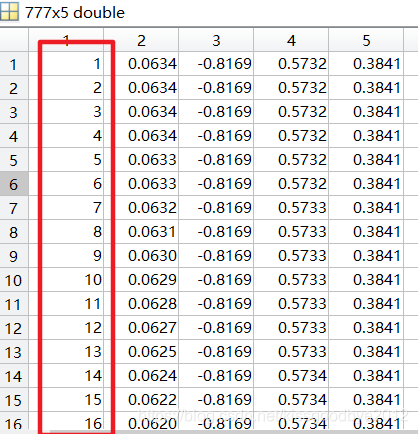
1.我自己的理解,矩阵必须是一个二维数组,不能是多维数组,多维的话得拆分;
2.这个矩阵的第一列是一个时间序列。如这一节最后所示。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











