







 本文介绍如何优化DAG作业依赖图的连线,避免线条穿过节点。通过分析场景,确定需要规避障碍节点,并提出模拟过程来找出绕开节点的路径。在实际实现中,由于像素点过多,放弃使用A*算法,最终采用优化方法解决问题。这是对原有连线算法的改进,旨在适应更复杂的层级结构。
本文介绍如何优化DAG作业依赖图的连线,避免线条穿过节点。通过分析场景,确定需要规避障碍节点,并提出模拟过程来找出绕开节点的路径。在实际实现中,由于像素点过多,放弃使用A*算法,最终采用优化方法解决问题。这是对原有连线算法的改进,旨在适应更复杂的层级结构。
概述
上个版本简单的连线在一些复杂场景,尤其层级比较多,连线跨层级比较多的情况下,会出现线条会穿过矩形的情况,这一讲就是在这个基础上,去优化这个连线。
场景分析
在下面几种情况下,简单版本的画法已经没法办规避障碍节点了。
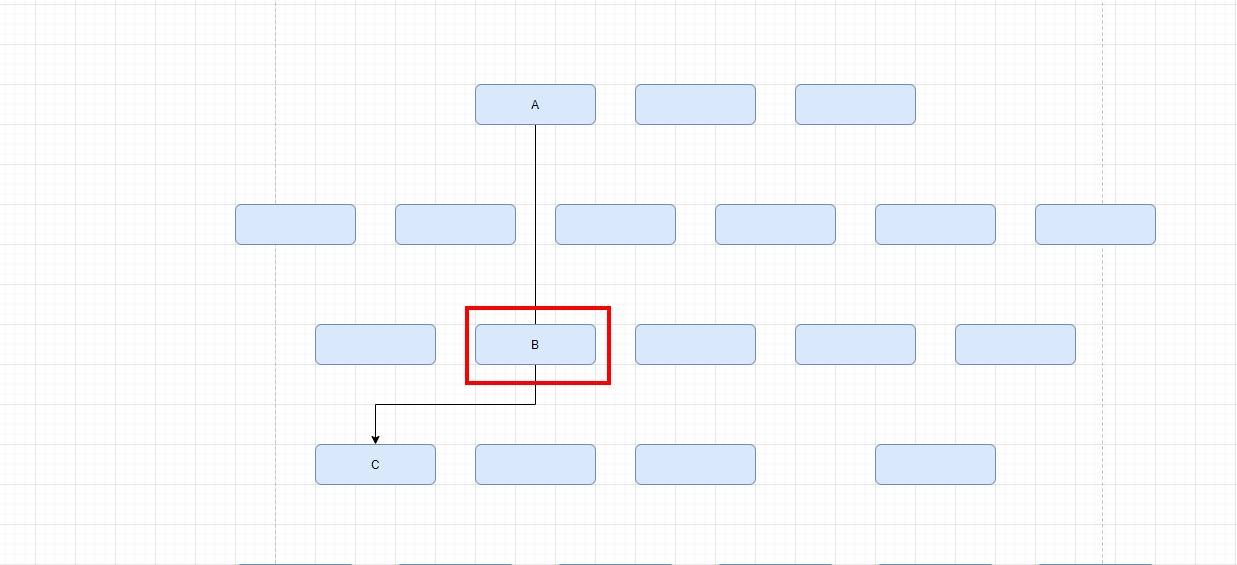
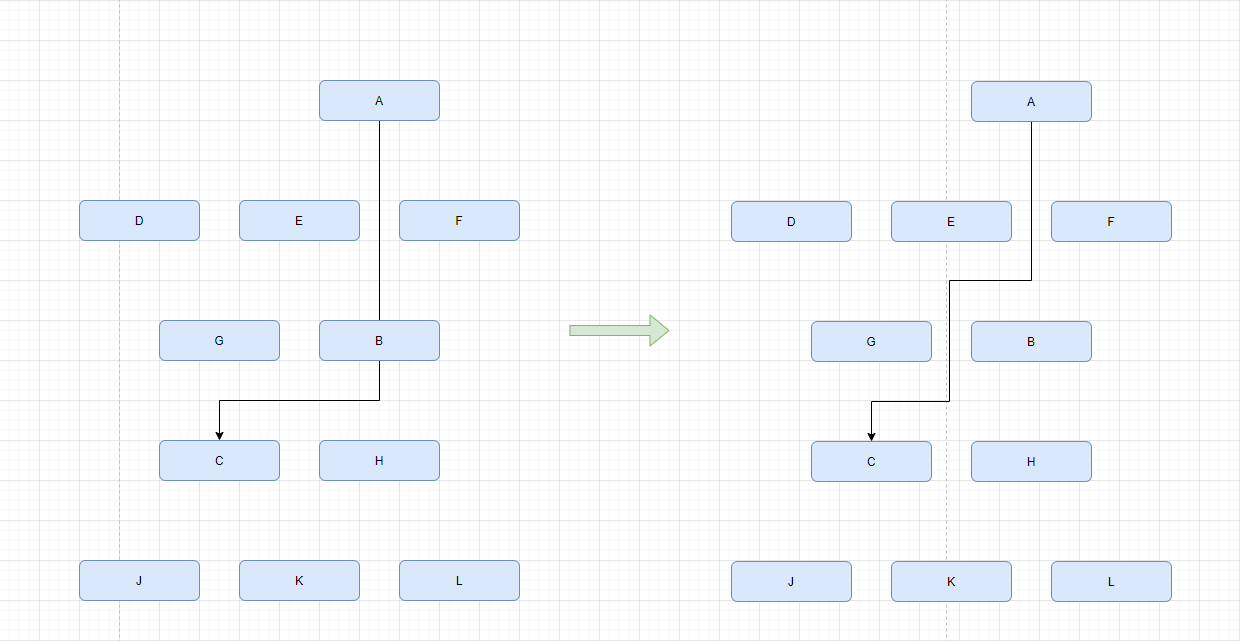
这种情况,由于简单版本,我们只在整条路径上添加了2个拐点,这种画法,当出现上述情况,线条就会被B挡住,实际的需求,我们要规避这种节点,绕开。
应该是下面这种情况:
再复杂一点的场景如下
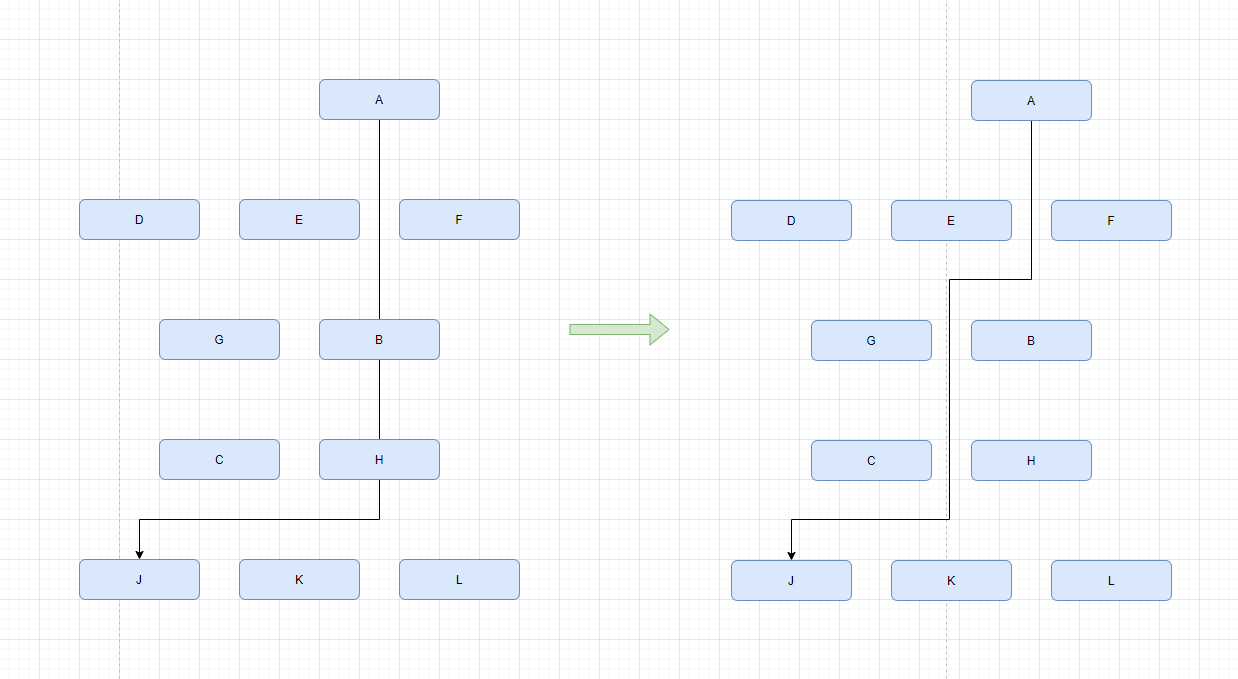
这时候有2个节点挡住了。我们要做的就是按照图示,绕开节点。
思路分析
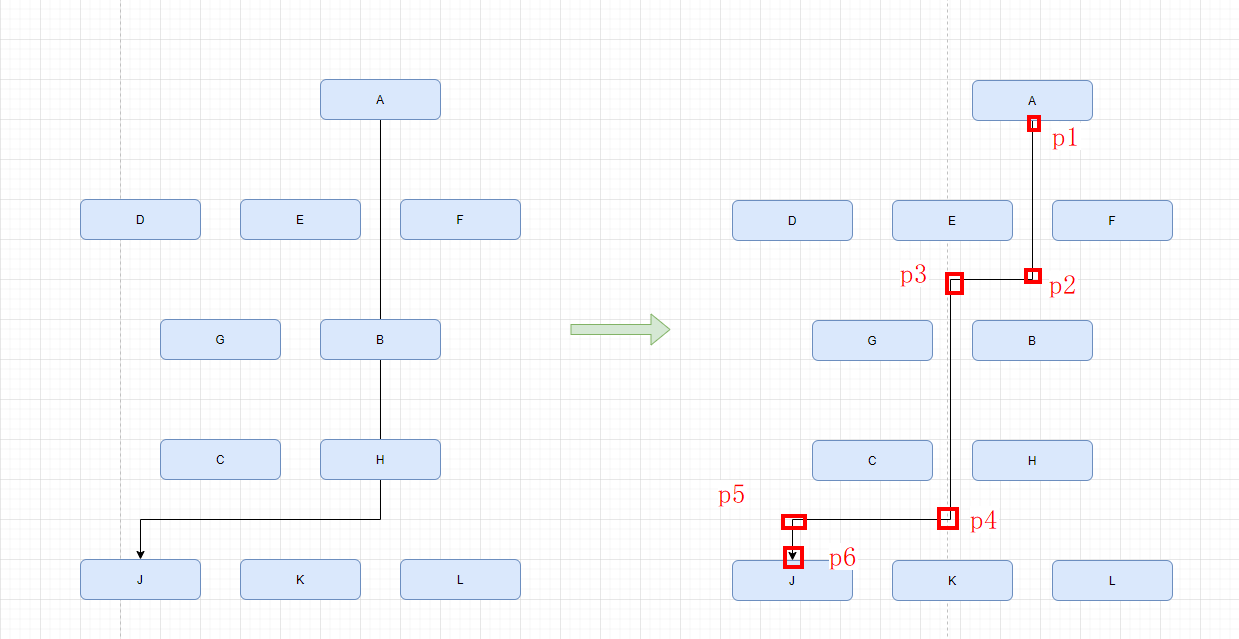
观察分析,我们要想绕开,一些障碍节点,我们先要知道哪些节点会挡住,才可以绕开。有两个已经明确数据是,每一层的节点的坐标我们是知道,起点p1, 终点是
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









