







 Faster R-CNN通过在conv5层后插入区域提议网络(RPN)来解决目标检测速度问题,无需外部区域提议。RPN后使用RoI池化和上游分类器及边界框回归器,类似于Fast R-CNN。网络同时预测多个尺度和宽高比的区域提议,并使用4种损失进行联合训练:RPN分类、RPN回归、Fast R-CNN分类和Fast R-CNN回归。
Faster R-CNN通过在conv5层后插入区域提议网络(RPN)来解决目标检测速度问题,无需外部区域提议。RPN后使用RoI池化和上游分类器及边界框回归器,类似于Fast R-CNN。网络同时预测多个尺度和宽高比的区域提议,并使用4种损失进行联合训练:RPN分类、RPN回归、Fast R-CNN分类和Fast R-CNN回归。
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal networks.” Advances in neural information processing systems. 2015. (Citations:
444).
444).
1 Motivation
Region proposals are the test-time computational bottleneck in state-of-the-art detection systems.
We solve this issue by inserting a Region Proposal Network (RPN) after the conv5 layer to produce region proposals directly. Thus, there is no need for external region proposals. After RPN, use RoI pooling and an upstream classifier and bounding box regressor just like Fast R-CNN. See Fig.
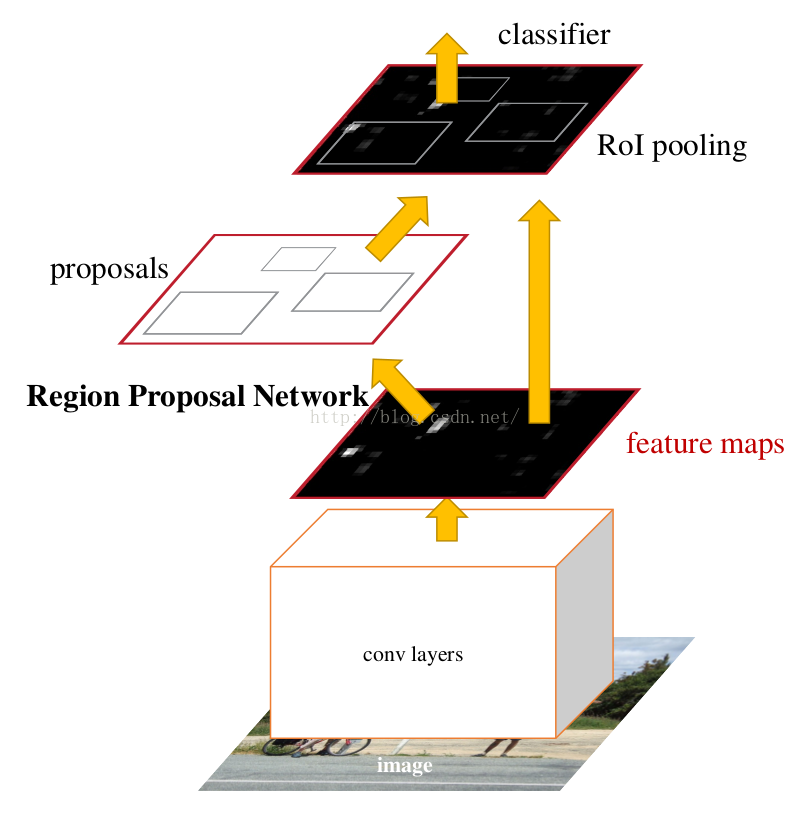
Slide a small window (3 × 3 in our case) on the conv5 feature map. For each window, we
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 956
956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









