







UWB测距基本原理:
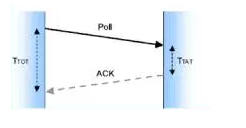
TOF(Time Of Flight飞行时间测距法):测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。我们将发送端发出的数据包和接收回应的时间间记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可以计算为:
TTOF=(TTOT-TTAT)/2
但是单纯的TOF算法有一个比较严格的约束:发送
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1433
1433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









