







 本文围绕DQN网络及其变体展开。先回顾DQN网络原理,介绍其代码实现,包括模型、经验回放等定义。接着阐述Double DQN、Dueling DQN、优先级经验回放PER - DQN的算法原理及代码实现,各变体在算法或实现上与DQN有所不同。
本文围绕DQN网络及其变体展开。先回顾DQN网络原理,介绍其代码实现,包括模型、经验回放等定义。接着阐述Double DQN、Dueling DQN、优先级经验回放PER - DQN的算法原理及代码实现,各变体在算法或实现上与DQN有所不同。
DQN网络及其变体的实现
一、DQN网络原理回顾
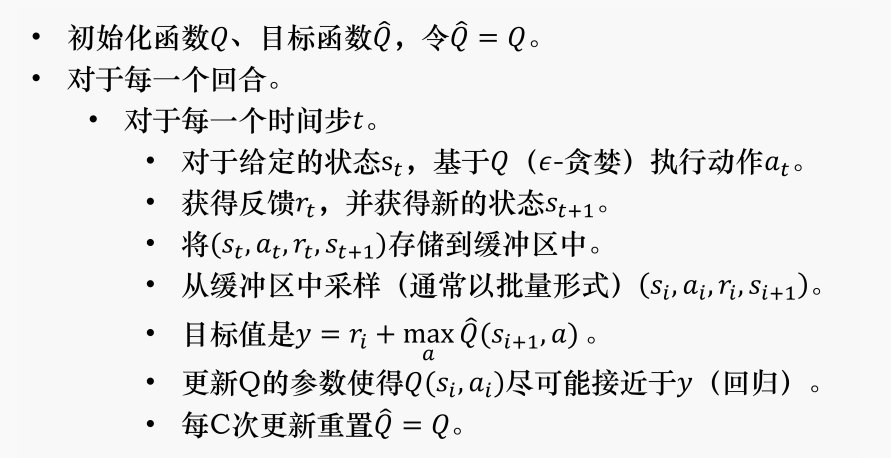
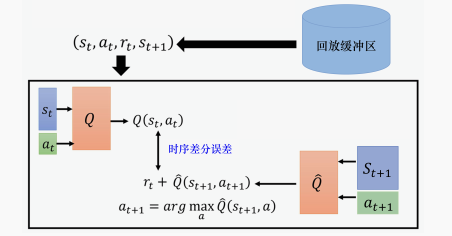
DQN采用经验回放和固定的Q-targets
根据** ϵ − g r e e d y \epsilon-greedy ϵ−greedy**执行行为 a t a_t at
将经验以 ( s t , a t , r t + 1 , s t + 1 ) (s_t,a_t,r_{t+1},s_{t+1}) (st,at,rt+1,st+1)的形式存储到replay memory D
将D中随机抽样一个mini-batch的经验 ( s , a , r , s ′ ) (s,a,r,s^\prime) (s,a,r,s′)
用旧的、固定的参数 w − w^- w−计算Q-learning target,每隔固定轮数才更新 w − w^- w−
在Q-network和Q-learning targets之间优化MSE
L
i
(
w
i
)
=
E
s
,
a
,
r
,
s
′
∼
D
i
[
(
r
+
γ
max
a
′
Q
(
s
′
,
a
′
;
w
i
−
)
−
Q
(
s
,
a
;
w
i
)
)
2
]
\mathcal{L}_i\left(w_i\right)=\mathbb{E}_{s, a, r, s^{\prime} \sim \mathcal{D}_i}\left[\left(r+\gamma \max _{a^{\prime}} Q\left(s^{\prime}, a^{\prime} ; w_i^{-}\right)-Q\left(s, a ; w_i\right)\right)^2\right]
Li(wi)=Es,a,r,s′∼Di[(r+γa′maxQ(s′,a′;wi−)−Q(s,a;wi))2]
使用随机梯度下降的方式更新参数
二、DQN代码实现
定义模型
DQN将原来的Q表,也就是每个状态下的每个动作具有一个价值,这样一个二维表改用神经网络来进行代替,这里使用一个多层感知机MLP来实现,输入维度是状态数,输出维度是动作数。
import torch.nn as nn
import torch.nn.functional as F
class MLP(nn.Module):
def __init__(self, n_states, n_actions, hidden_dim=128):
super(MLP, self).__init__()
self.fc1 = nn.Linear(n_states, hidden_dim) #输入层
self.fc2 = nn.Linear(hidden_dim, hidden_dim) #隐藏层
self.fc3 = nn.Linear(hidden_dim, n_actions) #输出层
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
return self.fc3(x)
定义经验回放
DQN网络中使用了经验回放,这一方面可以提升样本使用效率,每个样本不会只使用一次后就被丢掉,另一方面是可以减少样本之间的相关性,打乱样本再学习有助于提升训练的稳定性。
具体实现时有两个点,一是要向buffer中添加样本,如果buffer满了就将最早进入的删除,这可以用队列来实现;二是要进行采样,采样的量取决于采样batch的大小。
from collections import deque
import random
class ReplayBuffer(object):
def __init__(self, capacity: int) -> None:
self.capacity = capacity
self.buffer = deque(maxlen = self.capacity)
def sample(self, batch_size: int, sequential: bool = False):
if(batch_size > len(self.buffer)): #如果批量大小大于经验回放容量大小,则让batch_size大小变为经验回放容量大小
batch_size = len(self.buffer)
if sequential: #顺序采样
rand = random.randint(0, len(self.buffer) - batch_size)
batch = [self.buffer[i] for i in range(rand, rand + batch_size)]
return zip(*batch) #将batch中的元组按照列的方式重新组织
#这里的*运算符是拆包运算符,它会将batch中的元素拆分出来。当我们将这个拆分出来的元素传给zip()函数时,zip()函数会将这些元素按照其相对应的索引位置进行配对,形成一个新的可迭代对象。
'''
batch = [(1, 'a', 'A'), (2, 'b', 'B'), (3, 'c', 'C')]
zipped = zip(*batch)
print(list(zipped))
output: [(1, 2, 3), ('a', 'b', 'c'), ('A', 'B', 'C')]
'''
else: #随机采样
batch = random.sample(self.buffer, batch_size)
return zip(*batch)
def clear(self):
self.buffer.clear()
def __len__(self):
return len(self.buffer)
算法定义
算法定义中比较关键的是更新过程,需要根据损失函数进行梯度下降来更新参数
损失函数定义如下:
L
i
(
w
i
)
=
E
s
,
a
,
r
,
s
′
∼
D
i
[
(
y
i
−
Q
(
s
,
a
;
w
i
)
)
2
]
\mathcal{L}_i\left(w_i\right)=\mathbb{E}_{s, a, r, s^{\prime} \sim \mathcal{D}_i}\left[\left(y_i-Q\left(s, a ; w_i\right)\right)^2\right]
Li(wi)=Es,a,r,s′∼Di[(yi−Q(s,a;wi))2]
其中
y
i
y_i
yi计算根据是否为终止状态是不同的
y
i
=
{
r
i
对于终止状态
s
i
+
1
r
i
+
γ
max
a
′
Q
(
s
i
+
1
,
a
′
;
w
−
)
对于非终止状态
s
i
+
1
y_i= \begin{cases}r_i & \text { 对于终止状态 } s_{i+1} \\ r_i+\gamma \max _{a^{\prime}} Q\left(s_{i+1}, a^{\prime} ; w^-\right) & \text { 对于非终止状态 } s_{i+1}\end{cases}
yi={riri+γmaxa′Q(si+1,a′;w−) 对于终止状态 si+1 对于非终止状态 si+1
import torch
import torch.optim as optim
import math
import numpy as np
class DQN:
def __init__(self, model, memory, cfg):
self.n_actions = cfg['n_actions']
self.device = torch.device(cfg['device'])
self.gamma = cfg['gamma'] #奖励的折扣因子
#关于epsilon-greedy探索策略的相关参数
self.sample_count = 0 # 用于epsilon的衰减计数
self.epsilon = cfg['epsilon_start']
self.sample_count = 0
self.epsilon_start = cfg['epsilon_start']
self.epsilon_end = cfg['epsilon_end']
self.epsilon_decay = cfg['epsilon_decay']
self.batch_size = cfg['batch_size']
self.policy_net = model.to(self.device)
self.target_net = model.to(self.device)
#复制policy_net的参数到target_net,具体训练时target_net的参数是每隔固定轮次从policy_net获得的
for target_param, param in zip(self.target_net.parameters(), self.policy_net.parameters()): #parameters()返回PyTorch中的可学习参数,例如神经网络层的权重和偏差。
#使用zip()函数将目标网络和策略网络的对应参数进行配对。这样,我们可以同时遍历两个神经网络的参数。
#使用data.copy_()方法将策略网络的参数值复制到目标网络的参数中。这里使用copy_()方法是因为我们想要复制参数的值,而不是共享参数的内存地址。
target_param.data.copy_(param.data)
self.optimizer = optim.Adam(self.policy_net.parameters(), lr=cfg['lr']) #定义优化器
self.memory = memory #经验回放
def sample_action(self, state):
self.sample_count += 1
#epsilon指数衰减
self.epsilon = self.epsilon_end + (self.epsilon_start = self.epsilon_end) * math.exp(-1 * self.sample_count / self.epsilon_decay)
if random.random() > self.epsilon:
with torch.no_grad():
state = torch.tensor(state, device = self.device, dtype = torch.float32).unsqueeze(dim=0)
q_values = self.policy_net(state) #将状态state输入到self.policy_net(一个神经网络)中进行前向计算,得到每个动作对应的Q值。
action = q_values.max(1)[1].item()
#从Q值中选择具有最大Q值的动作作为最优动作。.max(1)返回Q值中的最大值和对应的索引,
# [1]表示取索引部分,.item()将索引转换为普通的Python数值,以便进行后续操作。
else:
action = random.randrange(self.n_actions)
return action
@torch.no_grad() # 不计算梯度,该装饰器效果等同于with torch.no_grad():
def predict_action(self, state):
''' 预测动作
'''
state = torch.tensor(state, device=self.device, dtype=torch.float32).unsqueeze(dim=0)
q_values = self.policy_net(state)
action = q_values.max(1)[1].item() # 选择Q值最大的动作
return action
def update(self):
if len(self.memory) < self.batch_size:
return
# 从经验回放中随机采样一个批量的样本
state_batch, action_batch, reward_batch, next_state_batch, done_batch = self.memory.sample(self.batch_size)
# 将数据转换为tensor
state_batch = torch.tensor(np.array(state_batch), device=self.device, dtype=torch.float)
action_batch = torch.tensor(action_batch, device=self.device).unsqueeze(1)
reward_batch = torch.tensor(reward_batch, device=self.device, dtype=torch.float)
next_state_batch = torch.tensor(np.array(next_state_batch), device=self.device, dtype=torch.float)
done_batch = torch.tensor(np.float32(done_batch), device=self.device)
q_values = self.policy_net(state_batch).gather(dim=1, index=action_batch) # 计算当前状态(s_t,a)对应的Q(s_t, a)
next_q_values = self.target_net(next_state_batch).max(1)[0].detach() # 计算下一时刻的状态(s_t_,a)对应的Q值
# 计算期望的Q值,对于终止状态,此时done_batch[0]=1, 对应的expected_q_value等于reward
expected_q_values = reward_batch + self.gamma * next_q_values * (1-done_batch)
#当done_batch为1时,表示对应样本是终止状态,此时(1-done_batch)的值为0,表示不考虑未来奖励。
#因此,对于终止状态,目标Q值只由当前时刻的奖励决定。这种处理方式可以确保在训练过程中,终止状态的目标Q值是正确的,并且不会受到未来状态的影响。
#这样可以提高训练的稳定性和效果。
loss = nn.MSELoss()(q_values, expected_q_values.unsqueeze(1)) # 计算均方根损失
# 优化更新模型
self.optimizer.zero_grad()
loss.backward()
# clip防止梯度爆炸
for param in self.policy_net.parameters():
param.grad.data.clamp_(-1, 1)
self.optimizer.step()
定义训练
def train(cfg, env, agent):
print("开始训练")
reward = [] #记录所有回合的奖励
steps = []
for i_ep in range(cfg['train_eps']):
ep_reward = 0 # 记录一回合内的奖励
ep_step = 0
state = env.reset() #重置环境
for _ in range(cfg['ep_max_steps']):
ep_step += 1
action = agent.sample_action(state) #选择动作
next_state, reward, done, _ = env.step(action) # 更新环境,返回transition
#step函数的返回值是:next_state, reward, done(bool值,表示是否结束), info(额外信息字典,一般情况下可以忽略)
agent.memory.push((state, action, reward, next_state, done)) # 保存transition,经验回放
state = next_state # 更新下一个状态
agent.update() # 更新智能体
ep_reward += reward # 累加奖励
if done:
break
if (i_ep + 1) % cfg['target_update'] == 0: # 智能体目标网络更新
agent.target_net.load_state_dict(agent.policy_net.state_dict()) #将actor的权值赋值给target_net将policy_net的参数加载到target_net中,使得两个网络的参数保持一致,以提高训练的稳定性。
steps.append(ep_step)
rewards.append(ep_reward)
if (i_ep + 1) % 10 == 0:
print(f"回合:{i_ep+1}/{cfg['train_eps']},奖励:{ep_reward:.2f},Epsilon:{agent.epsilon:.3f}")
print("完成训练!")
env.close()
return {'rewards':rewards}
def test(cfg, env, agent):
print("开始测试!")
rewards = [] # 记录所有回合的奖励
steps = []
for i_ep in range(cfg['test_eps']):
ep_reward = 0 # 记录一回合内的奖励
ep_step = 0
state = env.reset() # 重置环境,返回初始状态
for _ in range(cfg['ep_max_steps']):
ep_step+=1
action = agent.predict_action(state) # 选择动作
next_state, reward, done, _ = env.step(action) # 更新环境,返回transition
state = next_state # 更新下一个状态
ep_reward += reward # 累加奖励
if done:
break
steps.append(ep_step)
rewards.append(ep_reward)
print(f"回合:{i_ep+1}/{cfg['test_eps']},奖励:{ep_reward:.2f}")
print("完成测试")
env.close()
return {'rewards':rewards}
定义环境
import gym
import os
def all_seed(env,seed = 1):
''' 万能的seed函数
'''
env.seed(seed) # env config
np.random.seed(seed)
random.seed(seed)
torch.manual_seed(seed) # config for CPU
torch.cuda.manual_seed(seed) # config for GPU
os.environ['PYTHONHASHSEED'] = str(seed) # config for python scripts
# config for cudnn
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.enabled = False
def env_agent_config(cfg):
env = gym.make(cfg['env_name']) # 创建环境
if cfg['seed'] !=0:
all_seed(env,seed=cfg['seed'])
n_states = env.observation_space.shape[0]
n_actions = env.action_space.n
print(f"状态空间维度:{n_states},动作空间维度:{n_actions}")
cfg.update({"n_states":n_states,"n_actions":n_actions}) # 更新n_states和n_actions到cfg参数中
model = MLP(n_states, n_actions, hidden_dim = cfg['hidden_dim']) # 创建模型
memory = ReplayBuffer(cfg['memory_capacity'])
agent = DQN(model,memory,cfg)
return env,agent
设置参数
import argparse
import matplotlib.pyplot as plt
import seaborn as sns
def get_args():
""" 超参数
"""
parser = argparse.ArgumentParser(description="hyperparameters")
parser.add_argument('--algo_name',default='DQN',type=str,help="name of algorithm")
parser.add_argument('--env_name',default='CartPole-v0',type=str,help="name of environment")
parser.add_argument('--train_eps',default=200,type=int,help="episodes of training")
parser.add_argument('--test_eps',default=20,type=int,help="episodes of testing")
parser.add_argument('--ep_max_steps',default = 100000,type=int,help="steps per episode, much larger value can simulate infinite steps")
parser.add_argument('--gamma',default=0.95,type=float,help="discounted factor")
parser.add_argument('--epsilon_start',default=0.95,type=float,help="initial value of epsilon")
parser.add_argument('--epsilon_end',default=0.01,type=float,help="final value of epsilon")
parser.add_argument('--epsilon_decay',default=500,type=int,help="decay rate of epsilon, the higher value, the slower decay")
parser.add_argument('--lr',default=0.0001,type=float,help="learning rate")
parser.add_argument('--memory_capacity',default=100000,type=int,help="memory capacity")
parser.add_argument('--batch_size',default=64,type=int)
parser.add_argument('--target_update',default=4,type=int)
parser.add_argument('--hidden_dim',default=256,type=int)
parser.add_argument('--device',default='cuda',type=str,help="cpu or cuda")
parser.add_argument('--seed',default=10,type=int,help="seed")
args = parser.parse_args([])
args = {**vars(args)} # 转换成字典类型
## 打印超参数
print("超参数")
print(''.join(['=']*80))
tplt = "{:^20}\t{:^20}\t{:^20}"
print(tplt.format("Name", "Value", "Type"))
for k,v in args.items():
print(tplt.format(k,v,str(type(v))))
print(''.join(['=']*80))
return args
def smooth(data, weight=0.9):
'''用于平滑曲线,类似于Tensorboard中的smooth曲线
'''
last = data[0]
smoothed = []
for point in data:
smoothed_val = last * weight + (1 - weight) * point # 计算平滑值
smoothed.append(smoothed_val)
last = smoothed_val
return smoothed
def plot_rewards(rewards,cfg, tag='train'):
''' 画图
'''
sns.set()
plt.figure() # 创建一个图形实例,方便同时多画几个图
plt.title(f"{tag}ing curve on {cfg['device']} of {cfg['algo_name']} for {cfg['env_name']}")
plt.xlabel('epsiodes')
plt.plot(rewards, label='rewards')
plt.plot(smooth(rewards), label='smoothed')
plt.legend()
plt.show()
开始训练
# 获取参数
cfg = get_args()
# 训练
env, agent = env_agent_config(cfg)
res_dic = train(cfg, env, agent)
plot_rewards(res_dic['rewards'], cfg, tag="train")
# 测试
res_dic = test(cfg, env, agent)
plot_rewards(res_dic['rewards'], cfg, tag="test") # 画出结果
三、Double DQN
算法回顾
在 DDQN 里面,选动作的 Q 函数与计算值的 Q 函数不是同一个。在原来的深度 Q 网络里面,我们穷举所有的 a,把每一个 a 都代入 Q 函数,看哪一个 a 可以得到的 Q 值最高,就把那个 Q 值加上
r
t
r_t
rt。
r
t
+
γ
max
a
′
Q
(
s
′
,
a
′
;
w
i
−
)
r_t+\gamma \max _{a^{\prime}} Q\left(s^{\prime}, a^{\prime} ; w_i^{-}\right)
rt+γa′maxQ(s′,a′;wi−)
但是在 DDQN 里面有两个 Q 网络,第一个 Q 网络 Q 决定哪一个动作的 Q 值最大(我们把所有的 a 代入 Q 函数中,看看哪一个 a 的 Q 值最大)。我们决定动作以后,Q 值是用 Q′ 算出来的。
假设我们有两个 Q 函数——Q 和 Q′,如果 Q 高估了它选出来的动作 a,只要 Q′ 没有高估动作 a 的值,算出来的就还是正常的值。假设 Q′ 高估了某一个动作的值,也是没问题的,因为只要 Q 不选这个动作就可以,这就是 DDQN 神奇的地方。
Q
(
s
t
,
a
t
)
⟷
r
t
+
Q
′
(
s
t
+
1
,
arg
max
a
Q
(
s
t
+
1
,
a
)
)
Q\left(s_t, a_t\right) \longleftrightarrow r_t+Q^{\prime}\left(s_{t+1}, \arg \max _a Q\left(s_{t+1}, a\right)\right)
Q(st,at)⟷rt+Q′(st+1,argamaxQ(st+1,a))
我们动手实现的时候,有两个 Q 网络:会更新的 Q 网络和目标 Q 网络。所以在 DDQN 里面,我们会用会更新参数的 Q 网络去选动作,用目标 Q 网络(固定住的网络)计算值。
代码实现
具体代码实现和DQN非常相似,只有算法定义中的update函数需要修改
def update(self):
if len(self.memory) < self.batch_size: # 当经验回放中不满足一个批量时,不更新策略
return
else:
if not self.update_flag:
print("开始更新策略!")
self.update_flag = True
# 从经验回放中随机采样一个批量的转移(transition)
state_batch, action_batch, reward_batch, next_state_batch, done_batch = self.memory.sample(
self.batch_size)
# 将数据转换为tensor
state_batch = torch.tensor(np.array(state_batch), device=self.device, dtype=torch.float)
action_batch = torch.tensor(action_batch, device=self.device).unsqueeze(1)
reward_batch = torch.tensor(reward_batch, device=self.device, dtype=torch.float).unsqueeze(1)
next_state_batch = torch.tensor(np.array(next_state_batch), device=self.device, dtype=torch.float)
done_batch = torch.tensor(np.float32(done_batch), device=self.device).unsqueeze(1)
q_value_batch = self.policy_net(state_batch).gather(dim=1, index=action_batch) # 实际的Q值
next_q_value_batch = self.policy_net(next_state_batch) # 下一个状态对应的实际策略网络Q值
next_target_value_batch = self.target_net(next_state_batch) # 下一个状态对应的目标网络Q值
# 将策略网络Q值最大的动作对应的目标网络Q值作为期望的Q值
next_target_q_value_batch = next_target_value_batch.gather(1, torch.max(next_q_value_batch, 1)[1].unsqueeze(1))
#torch.max(next_q_value_batch, 1)表示对next_q_value_batch沿着第1维(即列维度)取最大值,并返回最大值和最大值的索引。
#这个操作得到的是一个元组,包含两个张量,第一个张量是最大值的值,形状为(batch_size,);
#第二个张量是最大值的索引,形状为(batch_size,)。其中,最大值的索引代表了下一状态对应的最优动作。
#接下来,unsqueeze(1)操作将最大值的索引张量的维度从(batch_size,)变为(batch_size, 1),即在第1维插入一个维度,
#使得它与next_target_value_batch的维度一致。
#gather是通过在第1维上按照torch.max(next_q_value_batch, 1)[1].unsqueeze(1)中的索引值进行取值,
#得到的是一个形状为(batch_size, 1)的张量,其中每个元素表示对应样本的下一状态的目标Q值。
expected_q_value_batch = reward_batch + self.gamma * next_target_q_value_batch* (1-done_batch) # 期望的Q值
# 计算损失
loss = nn.MSELoss()(q_value_batch, expected_q_value_batch)
# 优化更新模型
self.optimizer.zero_grad()
loss.backward()
# clip防止梯度爆炸
for param in self.policy_net.parameters():
param.grad.data.clamp_(-1, 1)
self.optimizer.step()
if self.sample_count % self.target_update == 0: # 每隔一段时间,将策略网络的参数复制到目标网络
self.target_net.load_state_dict(self.policy_net.state_dict())
四、Dueling DQN
算法回顾
相较于原来的深度 Q 网络,它唯一的差别是改变了网络的架构。Q 网络输入状态,输出的是每一个动作的 Q 值。如图所示,原来的深度 Q 网络直接输出 Q 值,竞争深度 Q 网络不直接输出 Q 值,而是分成两条路径运算。第一条路径会输出一个标量 V ( s ) V(s) V(s),因为它与输入 s s s是有关系的,所以称为 V ( s ) V(s) V(s)。第二条路径会输出一个向量 A ( s , a ) A(s,a) A(s,a),它的每一个动作都有一个值。我们再把 V ( s ) V(s) V(s)和 A ( s , a ) A(s,a) A(s,a)加起来就可以得到 Q 值 Q ( s , a ) Q(s,a) Q(s,a)。

Q
(
s
,
a
)
=
V
(
s
)
+
A
(
s
,
a
)
Q(s,a)=V(s)+A(s,a)
Q(s,a)=V(s)+A(s,a)
这样的好处就是我们不需要把所有的状态-动作对都采样,可以用比较高效的方式去估计 Q 值。因为有时候我们更新的时候,不一定是更新 Q 表格,而是只更新了
V
(
s
)
V(s)
V(s),但更新
V
(
s
)
V(s)
V(s)的时候,只要修改
V
(
s
)
V(s)
V(s)的值,Q 表格的值也会被修改。竞争深度 Q 网络Dueling DQN是一个使用数据比较有效率的方法。同时为了避免网络更新到后期倾向于只更新
A
(
s
,
a
)
A(s,a)
A(s,a)而不更新
V
(
s
)
V(s)
V(s),训练时会给
A
(
s
,
a
)
A(s,a)
A(s,a)施加约束:和为0,实现方式为减去均值。
最终Q函数的公式如下:
Q
(
S
,
A
,
w
,
α
,
β
)
=
V
(
S
,
w
,
α
)
+
(
A
(
S
,
A
,
w
,
β
)
−
1
A
∑
a
′
∈
A
A
(
S
,
a
′
,
w
,
β
)
)
\begin{gathered} Q(S, A, w, \alpha, \beta)=V(S, w, \alpha) +\left(A(S, A, w, \beta)-\frac{1}{\mathcal{A}}\right. \left.\sum_{a^{\prime} \in \mathcal{A}} A\left(S, a^{\prime}, w, \beta\right)\right) \end{gathered}
Q(S,A,w,α,β)=V(S,w,α)+(A(S,A,w,β)−A1a′∈A∑A(S,a′,w,β))
代码实现
具体实现上只需要在DQN实现基础上对模型定义进行修改即可。
import torch.nn as nn
import torch.nn.functional as F
class DuelingNet(nn.Module):
def __init__(self, n_states, n_actions,hidden_dim=128):
super(DuelingNet, self).__init__()
# hidden layer
self.hidden_layer = nn.Sequential(
nn.Linear(n_states, hidden_dim),
nn.ReLU()
)
# advantage
self.advantage_layer = nn.Sequential(
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, n_actions)
)
# value
self.value_layer = nn.Sequential(
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 1)
)
def forward(self, state):
x = self.hidden_layer(state)
advantage = self.advantage_layer(x)
value = self.value_layer(x)
return value + advantage - advantage.mean()
#减去advantage.mean()是为了给advantage施加和为0的约束条件,来使得value和advantage同时得到更新
五、优先级经验回放 PER-DQN
算法回顾
我们原来在采样数据训练 Q 网络的时候,会均匀地从回放缓冲区里面采样数据。这样不一定是最好的,因为也许有一些数据比较重要。假设有一些数据,我们之前采样过,发现这些数据的时序差分误差特别大(时序差分误差就是网络的输出与目标之间的差距),这代表我们在训练网络的时候,这些数据是比较不好训练的。既然比较不好训练,就应该给它们比较大的概率被采样到,即给它优先权。这样在训练的时候才会多考虑那些不好训练的数据。实际上在做 PER 的时候,我们不仅会更改采样的过程,还会因为更改了采样的过程,而更改更新参数的方法。所以 PER 不仅改变了采样数据的分布,还改变了训练过程。
代码实现
代码实现中与之前DQN网络的不同在于经验回放的定义,原本的经验回放就是从buffer中随机采样batch_size大小的样本,在PER-DQN中使用了sum tree的数据结构,它是一种特殊的二叉树,其父亲节点的值等于子节点的和。节点上的值,定义为每个样本的优先度,这里就用TDerror来衡量。叶子上的数值就是样本优先度。
sum tree 采样过程:根据根节点的priority和采样样本数,划分采样的区间,然后在这些区间中均应采样得到所要选取的样本的优先度。从根节点开始,逐层将样本的优先度和节点的优先度进行对比,最终可以得到所要采样的叶子样本。
import numpy as np
import random
class SumTree:
'''SumTree for the per(Prioritized Experience Replay) DQN.
This SumTree code is a modified version and the original code is from:
https://github.com/MorvanZhou/Reinforcement-learning-with-tensorflow/blob/master/contents/5.2_Prioritized_Replay_DQN/RL_brain.py
'''
def __init__(self, capacity: int):
self.capacity = capacity
self.data_pointer = 0
self.n_entries = 0
self.tree = np.zeros(2 * capacity - 1)
self.data = np.zeros(capacity, dtype = object)
def update(self, tree_idx, p):
'''Update the sampling weight
'''
#p为该节点新的权重,计算change是为了方便修改父节点的值,父节点存储的是其子节点的权重之和
change = p - self.tree[tree_idx]
self.tree[tree_idx] = p
#不断向上更新,直到更新到根节点
while tree_idx != 0:
#计算该节点父节点的索引值
tree_idx = (tree_idx - 1) // 2
#修改父节点的值
self.tree[tree_idx] += change
def add(self, p, data):
'''Adding new data to the sumTree
'''
# data_pointer表示最新的数据存储位置,这些数据都存放在叶子节点,数据从0开始编号,但0号数据的索引tree_idx是self.capacity-1因为所有非叶子节点的数量为self.capacity-1
# 所有新添加节点的索引号是 self.data_pointer + self.capacity - 1
tree_idx = self.data_pointer + self.capacity - 1
self.data[self.data_pointer] = data
# print ("tree_idx=", tree_idx)
# print ("nonzero = ", np.count_nonzero(self.tree))
self.update(tree_idx, p)
self.data_pointer += 1
#添加节点数量大于capacity,将第一个添加进来的数据进行覆盖,循环添加
if self.data_pointer >= self.capacity:
self.data_pointer = 0
if self.n_entries < self.capacity:
self.n_entries += 1
def get_leaf(self, v):
'''Sampling the data
'''
parent_idx = 0
while True:
cl_idx = 2 * parent_idx + 1
cr_idx = cl_idx + 1
#该父节点的左子节点的索引已经大于整棵树的最大索引,说明这个父节点就是叶子节点
if cl_idx >= len(self.tree):
leaf_idx = parent_idx
break
else:
#如果寻找的权重值比左子节点对应的权重值要小,则继续往左子树寻找,否则将v减去左子节点的权重,并将parent_idx更新为右子节点的索引cr_idx
if v <= self.tree[cl_idx] :
parent_idx = cl_idx
else:
v -= self.tree[cl_idx]
parent_idx = cr_idx
#最后,根据叶子节点的索引leaf_idx计算出对应的数据在data数组中的索引data_idx,即leaf_idx - self.capacity + 1。
#然后将叶子节点的索引leaf_idx、权重self.tree[leaf_idx]和对应的数据self.data[data_idx]作为结果返回。
data_idx = leaf_idx - self.capacity + 1
return leaf_idx, self.tree[leaf_idx], self.data[data_idx]
def total(self):
return int(self.tree[0])
class ReplayTree:
'''ReplayTree for the per(Prioritized Experience Replay) DQN.
'''
def __init__(self, capacity):
self.capacity = capacity # the capacity for memory replay
self.tree = SumTree(capacity)
self.abs_err_upper = 1.
## hyper parameter for calculating the importance sampling weight
self.beta_increment_per_sampling = 0.001
self.alpha = 0.6
self.beta = 0.4
self.epsilon = 0.01
self.abs_err_upper = 1.
def __len__(self):
''' return the num of storage
'''
return self.tree.total()
def push(self, error, sample):
'''Push the sample into the replay according to the importance sampling weight
'''
#误差越大权重越高
p = (np.abs(error) + self.epsilon) ** self.alpha
self.tree.add(p, sample)
def sample(self, batch_size):
'''This is for sampling a batch data and the original code is from:
https://github.com/rlcode/per/blob/master/prioritized_memory.py
'''
#计算了每个批次中的优先级段长度,使用优先级的和除以batch_size
pri_segment = self.tree.total() / batch_size
priorities = []
batch = []
idxs = []
is_weights = []
#更新重要性采样的权重衰减系数
self.beta = np.min([1., self.beta + self.beta_increment_per_sampling])
#计算最小优先级被采样的概率,是用最小优先级的值除以缓存中的优先级之和
min_prob = np.min(self.tree.tree[-self.tree.capacity:]) / self.tree.total()
for i in range(batch_size):
a = pri_segment * i
b = pri_segment * (i+1)
#根据优先级段长度计算了一个随机值s,比如优先级和为100,batch_size=20,那么pri_segment=5,挑选的第一个样本的优先级就是在0-5之间进行挑选,第二个样本就是在5-10之间挑选
s = random.uniform(a, b)
#获取样本的节点索引,优先级和数据
idx, p, data = self.tree.get_leaf(s)
priorities.append(p)
batch.append(data)
idxs.append(idx)
prob = p / self.tree.total()
#计算每个样本的采样概率,公式为样本优先级除以优先级之和
sampling_probabilities = np.array(priorities) / self.tree.total()
is_weights = np.power(self.tree.n_entries * sampling_probabilities, -self.beta)
is_weights /= is_weights.max()
return zip(*batch), idxs, is_weights
def batch_update(self, tree_idx, abs_errors):
'''Update the importance sampling weight
'''
abs_errors += self.epsilon
#计算误差,并对误差设置了最大阈值1
clipped_errors = np.minimum(abs_errors, self.abs_err_upper)
#进行指数运算获得新的优先级
ps = np.power(clipped_errors, self.alpha)
for ti, p in zip(tree_idx, ps):
self.tree.update(ti, p)
六、参考资料
强化学习基础 北京邮电大学 鲁鹏 强化学习基础 (本科生课程) 北京邮电大学 鲁鹏_哔哩哔哩_bilibili
深度强化学习 台湾大学 李宏毅 DRL Lecture 1_ Policy Gradient (Review)_哔哩哔哩_bilibili
蘑菇书EasyRL datawhalechina/easy-rl: 强化学习中文教程(蘑菇书),在线阅读地址:https://datawhalechina.github.io/easy-rl/
https://github.com/datawhalechina/easy-rl/tree/master/notebooks

















 1158
1158

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









