









【强化学习实战-06】Policy based RL保姆级教程:以Cart Pole为例
作者:刘兴禄,清华大学博士在读
本笔记整理自 (作者: Shusen Wang):
https://www.bilibili.com/video/BV1rv41167yx?from=search&seid=18272266068137655483&spm_id_from=333.337.0.0
强化学习的Policy based RL和Value based RL
强化学习中的两大类Policy based RL和Value based RL,分别是学习(或者)近似不同的函数。但是最终目的都是能够指导agent做动作。
要指导agent做动作,有下面两种方法:
能够知道在状态s下,做每个动作a的期望总价值,就可以根据价值,做价值最大的动作。用数学的语言表达,就是学习动作-价值函数Q ( s , a ) Q(s, a) Q(s,a),得到最优动作价值函数 Q ∗ ( s , a ) Q^{*}(s, a) Q∗(s,a),然后我们根据下面的表达式做动作即可。给定状态 s t s_t st,下一时刻的动作可以按照下面的标准选出: a t + 1 = arg max a ∈ A Q ∗ ( s t , a ) a_{t+1} = \text{arg} \max_{a \in \mathcal{A}} Q^{*}(s_t, a) at+1=arga∈AmaxQ∗(st,a)。能够知道在状态s下,下一步做每个动作a的概率,就可以根据概率进行随机抽样,得到下一步的动作。用数学的语言表达,就是学习策略函数π ( a ∣ s ) \pi(a|s) π(a∣s),得到最优策略函数π ∗ ( a ∣ s ) \pi^*(a|s) π∗(a∣s)(也就是given 状态 s s s,下一步做出动作 a a a的最好的概率分布),然后我们根据下面的表达式做动作即可。给定状态 s t s_t st,下一时刻的动作可以按照下面的标准选出 (注意 A t + 1 A_{t+1} At+1是随机变量):
A t + 1 ∼ π ∗ ( ⋅ ∣ s t ) A_{t+1} \sim \pi^*(\cdot|s_t) At+1∼π∗(⋅∣st)。选择的方法就是随机抽样,也就是,下一步具体要做的动作 a t + 1 a_{t+1} at+1是按照下面的方法选出:
a t + 1 ← random choice [ π ∗ ( ⋅ ∣ s t ) ] a_{t+1} \leftarrow \text{random choice } [\pi^*(\cdot|s_t)] at+1←random choice [π∗(⋅∣st)]
其中,第一种叫做Value based RL,第二种叫做Policy based RL。具体来讲就是
1. Value based RL: 以 Q ∗ ( s , a ) Q^{*}(s, a) Q∗(s,a)指导agent做动作,给定状态 s t s_t st,下一步的动作为 a t + 1 = arg max a ∈ A Q ∗ ( s t , a ) a_{t+1} = \text{arg} \max_{a \in \mathcal{A}} Q^{*}(s_t, a) at+1=argmaxa∈AQ∗(st,a)。
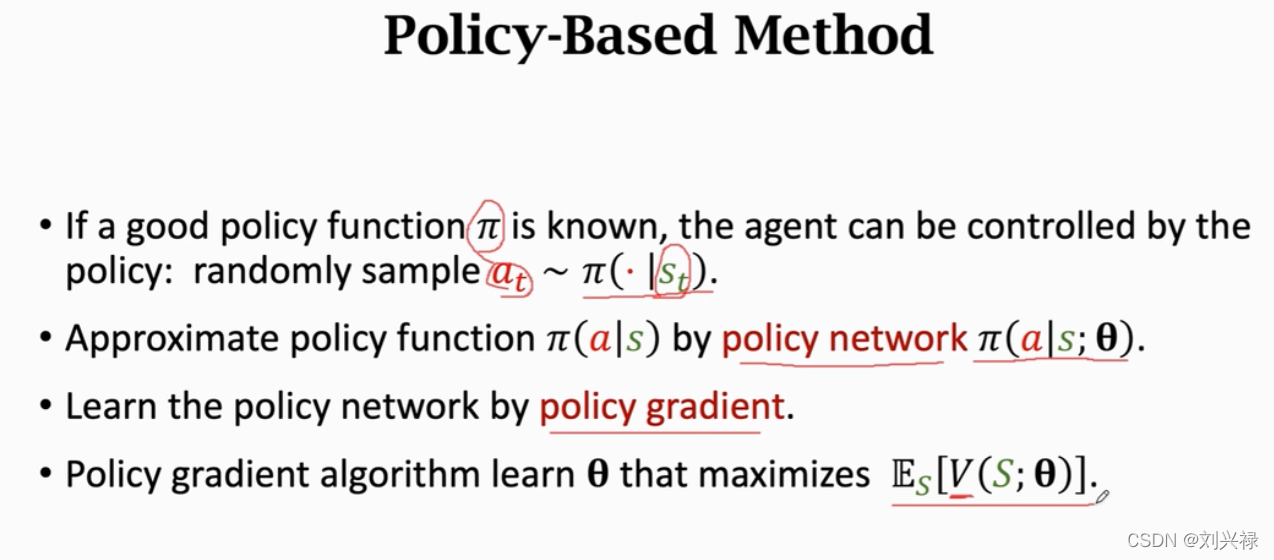
2. Policy based RL: 以 π ∗ ( a ∣ s ) \pi^*(a|s) π∗(a∣s)指导agent做动作,利用随机抽样获得下一步要做的动作。给定状态 s t s_t st,下一步的动作为 a t + 1 ← random choice [ π ∗ ( ⋅ ∣ s t ) ] a_{t+1} \leftarrow \text{random choice } [\pi^*(\cdot|s_t)] at+1←random choice [π∗(⋅∣st)]。
这两种算法分别是如何实现的呢?
1. Value based RL:
- 用神经网络 Q ( s , a ; θ ) Q(s, a; \theta) Q(s,a;θ)去近似
最优动作价值函数Q ∗ ( s , a ) Q^{*}(s, a) Q∗(s,a),用TD-learning, SARSA等算法去训练 Q ( s , a ; θ ) Q(s, a; \theta) Q(s,a;θ)。之前的推文已经介绍了DQN, Double DQN, Dueling Double DQN,都是这种类型。
2. Policy based RL:
- 用神经网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ)去近似
最优策略函数π ∗ ( a ∣ s ) \pi^*(a|s) π∗(a∣s),这里训练有几种方法:- (1). 用
Policy Gradient算法去训练单个策略网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ),价值可以用REINFORCE来近似,不用神经网络。- (2). 用
基本的Actor-Critic算法去同时训练策略网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ)和价值网络 Q ( s , a ; w ) Q(s, a; \mathbf{w}) Q(s,a;w),其中策略网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ)用Policy Gradient算法更新,价值网络 Q ( s , a ; w ) Q(s, a; \mathbf{w}) Q(s,a;w)用TD-learning等算法更新。- (3). 用
改进后的Actor-Critic算法,也就是Advantage Actor-Critic (A2C),或者Asynchronous Advantage Actor Critic (A3C)去同时训练策略网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ)和价值网络 Q ( s , a ; w ) Q(s, a; \mathbf{w}) Q(s,a;w),其中策略网络 π ( a ∣ s ; θ ) \pi(a | s; \theta) π(a∣s;θ)用Policy Gradient算法更新,价值网络 Q ( s , a ; w ) Q(s, a; \mathbf{w}) Q(s,a;w)的构建参照Dueling Network,引入Advantage function(stream),然后用TD-learning等算法更新 Q ( s , a ; w ) Q(s, a; \mathbf{w}) Q(s,a;w)。
Policy based RL
Policy based RL就是用神经网络
π
(
s
,
a
;
θ
)
\pi(s, a; \theta)
π(s,a;θ)去近似最优策略函数
π
∗
(
a
∣
s
)
\pi^*(a|s)
π∗(a∣s)。这里,
π
(
s
,
a
;
θ
)
\pi(s, a; \theta)
π(s,a;θ)也叫策略网络。
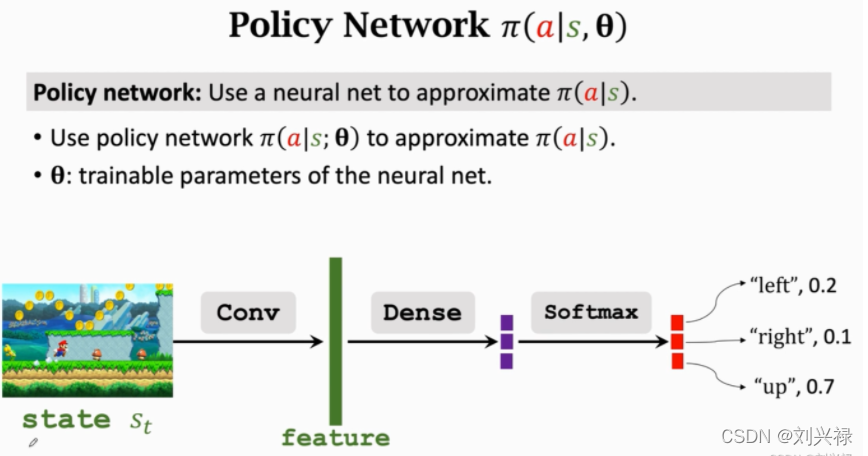
策略网络
π
(
s
,
a
;
θ
)
\pi(s, a; \theta)
π(s,a;θ)是一个概率分布,满足
∑
a
∈
A
π
(
a
∣
s
;
θ
)
=
1
\sum_{a \in \mathcal{A}}\pi(a|s; \theta) = 1
a∈A∑π(a∣s;θ)=1
价值函数:value function
首先我们需要再次回顾相关概念。
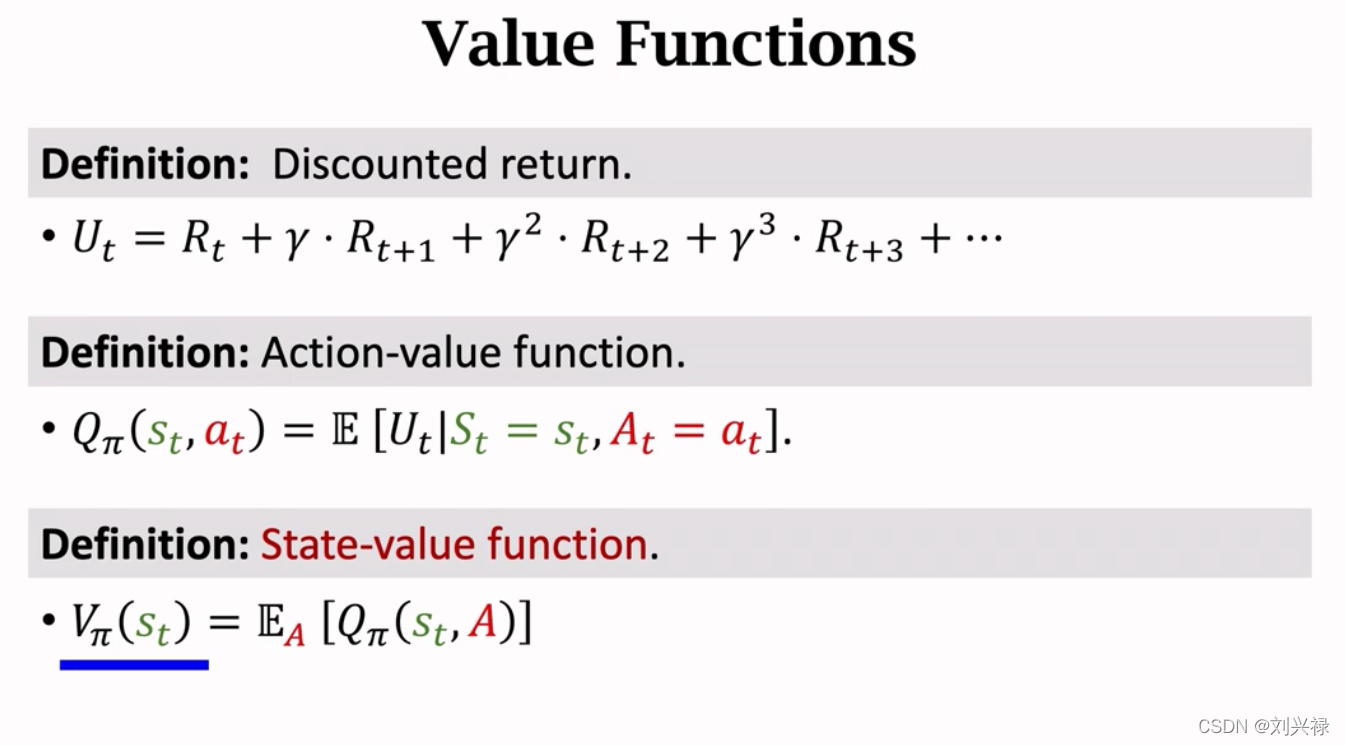
- 折扣回报(Discounted return): 也就是从 t t t时刻到结束的累计总回报。 U t = R t + γ ⋅ R t + 1 + γ 2 ⋅ R t + 2 + γ 3 ⋅ R t + 3 + ⋯ = ∑ k = 1 + ∞ γ k R t + k \begin{aligned} U_t &= R_t + \gamma \cdot R_{t+1} + \gamma^2 \cdot R_{t+2} + \gamma^3 \cdot R_{t+3} + \cdots \\ &= \sum_{k=1}^{+\infty}{\gamma^k R_{t+k}} \end{aligned} Ut=Rt+γ⋅Rt+1+γ2⋅Rt+2+γ3⋅Rt+3+⋯=k=1∑+∞γkRt+k
注意,大写字母都是随机变量。每一步的reward,也就是
R
t
,
R
t
+
1
,
R
t
+
2
,
⋯
R_t, R_{t+1}, R_{t+2}, \cdots
Rt,Rt+1,Rt+2,⋯,全部是随机变量,因为我们并不知道真实、准确的reward function,只能是自己凭借经验去设置一个自己觉得合理的reward function。或者说,等待环境返回一个reward的观测值:
r
t
r_t
rt。
- 动作-价值函数(Action-value function): Q π ( s t , a t ) Q_{\pi}(s_t, a_t) Qπ(st,at),表示在策略 π \pi π下,状态为 s t s_t st时采取动作 a t a_t at,获得的总折扣回报 U t U_t Ut的期望。也就是 Q π ( s t , a t ) = E [ U t ∣ S t = s t , A t = a t ] Q_{\pi}(s_t, a_t) = \mathbb{E}[U_t | S_t = s_t, A_t = a_t] Qπ(st,at)=E[Ut∣St=st,At=at]
另外,在Policy based reinforcement learning中,我们是学习状态价值函数
V
π
(
s
)
V_{\pi}(s)
Vπ(s),且
V
π
(
s
)
V_{\pi}(s)
Vπ(s)等于
V
π
(
s
t
)
=
E
A
[
Q
π
(
s
t
,
A
)
]
=
∑
a
π
(
a
t
∣
s
t
)
⋅
Q
π
(
s
t
,
a
t
)
≈
∑
a
π
(
a
t
∣
s
t
;
θ
)
⋅
q
(
s
t
,
a
t
;
w
)
\begin{aligned} V_{\pi}(s_t) &= \mathbb{E}_{A}[Q_{\pi}(s_t, A)] \\ &=\sum_{a} \pi(a_t|s_t) \cdot Q_{\pi}(s_t, a_t) \approx \sum_{a} \pi(a_t|s_t; \theta) \cdot q(s_t, a_t; \mathbf{w}) \end{aligned}
Vπ(st)=EA[Qπ(st,A)]=a∑π(at∣st)⋅Qπ(st,at)≈a∑π(at∣st;θ)⋅q(st,at;w)
最后,我们会同时得到:
策略网络(policy network),也就是 Actorπ ( a ∣ s ; θ ) \pi(a|s; \theta) π(a∣s;θ),和价值网络(value network),也就是Criticq ( s , a ; w ) q(s, a; \mathbf{w}) q(s,a;w)。注意这个价值网络 q ( s , a ; w ) q(s, a; \mathbf{w}) q(s,a;w)是不依赖于策略 π \pi π的,因为它就是一个唯一的神经网络而已, π \pi π变化,神经网络 q ( s , a ; w ) q(s, a; \mathbf{w}) q(s,a;w)不会变化。
虽然最后会同时得到策略网络(policy network) π ( a ∣ s ; θ ) \pi(a|s; \theta) π(a∣s;θ)和价值网络(value network) q ( s , a ; w ) q(s, a; \mathbf{w}) q(s,a;w),但是最后我们只是用策略网络(policy network) π ( a ∣ s ; θ ) \pi(a|s; \theta) π(a∣s;θ)去做动作(相当于去求解问题)。
因此,我们引出状态-价值函数
V
π
(
s
t
)
V_{\pi}(s_t)
Vπ(st)
- 状态-价值函数(State-value function): V π ( s t ) V_{\pi}(s_t) Vπ(st),表示在策略 π \pi π下,状态为 s t s_t st时会获得的总折扣回报 U t U_t Ut的期望。也就是
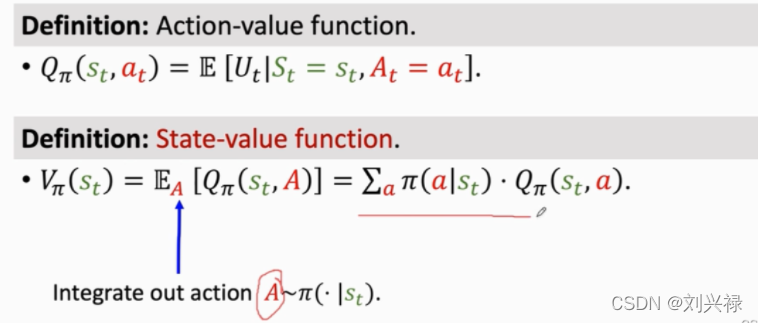
V π ( s t ) = E A [ Q π ( s t , A ) ] = E a ∼ π ( s t ) [ Q π ( s t , a ) ] = ∑ a π ( a t ∣ s t ) ⋅ Q π ( s t , a t ) \begin{aligned} V_{\pi}(s_t) &= \mathbb{E}_{A}[Q_{\pi}(s_t, A)] \\ &= \mathbb{E}_{a \sim \pi(s_t)}[Q_{\pi}(s_t, a)] \\ &=\sum_{a} \pi(a_t|s_t) \cdot Q_{\pi}(s_t, a_t) \end{aligned} Vπ(st)=EA[Qπ(st,A)]=Ea∼π(st)[Qπ(st,a)]=a∑π(at∣st)⋅Qπ(st,at)
基于价值函数,我们因此最优价值函数的概念。
- 最优动作-价值函数(Optimal action-value function): Q ∗ ( s , a ) Q^{*}(s, a) Q∗(s,a),表示在所有可能的策略 π \pi π下,状态为 s t s_t st时采取动作 a t a_t at,获得的总折扣回报 U t U_t Ut的
期望的最大值。也就是 Q ∗ ( s t , a t ) = max π Q π ( s , a ) Q^{*}(s_t, a_t) = \underset{\pi}{\max \,\,}{Q_{\pi}(s, a)} Q∗(st,at)=πmaxQπ(s,a)
最优动作-价值函数(Optimal action-value function)可以直接指导Agent做动作。
- 最优状态-价值函数(Optimal state-value function): V ∗ ( s ) V^{*}(s) V∗(s),表示在所有可能的策略 π \pi π下,状态为 s t s_t st时会获得的总折扣回报 U t U_t Ut的
期望的最大值。也就是 V ∗ ( s ) = max π V π ( s ) V^{*}(s) = \underset{\pi}{\max \,\,}{V_{\pi}(s)} V∗(s)=πmaxVπ(s)
最优状态-价值函数(Optimal state-value function)不可以直接指导Agent做动作,但是伴随其训练出的策略网络 π ( a ∣ s ) \pi(a|s) π(a∣s)可以指导Agent做动作。
Policy based RL: 详细理论介绍
上面已经介绍到,将动作价值函数
Q
π
(
s
,
A
)
Q_{\pi}(s, A)
Qπ(s,A)中的动作
A
A
A用积分消掉,就变成了状态价值函数,也就是
V
π
(
s
t
)
=
E
A
[
Q
π
(
s
t
,
A
)
]
=
E
a
∼
π
(
s
t
)
[
Q
π
(
s
t
,
a
)
]
=
∑
a
∈
A
π
(
a
t
∣
s
t
)
⋅
Q
π
(
s
t
,
a
t
)
\begin{aligned} V_{\pi}(s_t) &= \mathbb{E}_{A}[Q_{\pi}(s_t, A)] \\ &= \mathbb{E}_{a \sim \pi(s_t)}[Q_{\pi}(s_t, a)] \\ &=\sum_{a \in \mathcal{A}} \pi(a_t|s_t) \cdot Q_{\pi}(s_t, a_t) \end{aligned}
Vπ(st)=EA[Qπ(st,A)]=Ea∼π(st)[Qπ(st,a)]=a∈A∑π(at∣st)⋅Qπ(st,at)
比如,
s
t
=
current frame
s_t = \text{current frame}
st=current frame,下一步动作的策略为
π
(
a
∣
s
t
=
left
)
=
[
left=
0.1
,
right=
0.2
,
up=
0.7
]
\pi (a| s_t = \text{left}) = [\text{left=}0.1, \text{right=}0.2,\text{up=}0.7]
π(a∣st=left)=[left=0.1,right=0.2,up=0.7]
则此时
V
(
s
t
=
current frame
)
V(s_t = \text{current frame})
V(st=current frame)的计算如下
V
(
s
t
=
current frame
)
=
0.1
⋅
Q
(
s
t
,
left
)
+
0.2
⋅
Q
(
s
t
,
right
)
+
0.7
⋅
Q
(
s
t
,
up
)
\begin{aligned} V(s_t = \text{current frame}) = 0.1 \cdot Q(s_t, \text{left}) + 0.2 \cdot Q(s_t, \text{right}) + 0.7 \cdot Q(s_t, \text{up}) \end{aligned}
V(st=current frame)=0.1⋅Q(st,left)+0.2⋅Q(st,right)+0.7⋅Q(st,up)
- 这里: V π ( s t ) V_{\pi}(s_t) Vπ(st),给定策略 π \pi π,如果 V π ( s t ) V_{\pi}(s_t) Vπ(st)小,说明策略函数 π \pi π不好,胜算小。反之,如果 V π ( s t ) V_{\pi}(s_t) Vπ(st)大,说明策略函数 π \pi π非常好,胜算大。
我们就是要追求使得V π ( s t ) V_{\pi}(s_t) Vπ(st)大的策略函数π \pi π。
我们可以看到,由于 V π ( s t ) V_{\pi}(s_t) Vπ(st)可以等价的写成 V π ( s t ) = ∑ a π ( a t ∣ s t ) ⋅ Q π ( s t , a t ) V_{\pi}(s_t) = \sum_{a} \pi(a_t|s_t) \cdot Q_{\pi}(s_t, a_t) Vπ(st)=∑aπ(at∣st)⋅Qπ(st,at),这个里面就正好包含了策略函数 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)。那么,如果我们能直接近似得到 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st),那就可以控制agent做动作了。那么如何做呢?
可以这么做:
- 用一个神经网络 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)去近似策略函数 π ( a ∣ s t ) \pi(a|s_t) π(a∣st)
- 然后,这个神经网络可以辅助我们进一步去近似状态价值函数 V ( s t ) V(s_t) V(st),也就是状态价值函数 V ( s t ) V(s_t) V(st)也可以用同一个神经网络近似,表示为 V ( s t ; θ ) V(s_t; \theta) V(st;θ) (
注意V ( s t ; θ ) V(s_t; \theta) V(st;θ)和 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)中的 θ \theta θ指的是同一个神经网络。)
V ( s t ; θ ) = ∑ a ∈ A π ( a t ∣ s t ; θ ) ⋅ Q π ( s t , a t ) V(s_t; \theta) = \sum_{a \in \mathcal{A}} \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t) V(st;θ)=a∈A∑π(at∣st;θ)⋅Qπ(st,at)
这样,我们就用一个神经网络
θ
\theta
θ,用
V
(
s
t
;
θ
)
V(s_t; \theta)
V(st;θ)来近似出了状态价值函数
V
(
s
t
)
V(s_t)
V(st)。同时,我们也可以得到策略网络
π
(
a
∣
s
t
;
θ
)
\pi(a|s_t; \theta)
π(a∣st;θ),只需要基于策略网络
π
(
a
∣
s
t
;
θ
)
\pi(a|s_t; \theta)
π(a∣st;θ)指导agent做动作即可。
这里需要注意逻辑:由于 V π ( s t ) V_{\pi}(s_t) Vπ(st)本身是没办法指导agent做动作的。因此只得到 V π ( s t ) V_{\pi}(s_t) Vπ(st)还不够。我们需要将 V π ( s t ) V_{\pi}(s_t) Vπ(st)展开,也就是展开称为 V π ( s t ) = ∑ a π ( a t ∣ s t ) ⋅ Q π ( s t , a t ) V_{\pi}(s_t) = \sum_{a} \pi(a_t|s_t) \cdot Q_{\pi}(s_t, a_t) Vπ(st)=∑aπ(at∣st)⋅Qπ(st,at),我们通过用策略网络 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)去近似 π ( a ∣ s t ) \pi(a|s_t) π(a∣st),从而反推,近似出来 V π ( s t ) V_{\pi}(s_t) Vπ(st),而 V π ( s t ) V_{\pi}(s_t) Vπ(st)是越大越好,我们就可以最后通过训练得到最好的 V π ( s t ) V_{\pi}(s_t) Vπ(st),从而可以同时得到 V π ( s t ; θ ) V_{\pi}(s_t;\theta) Vπ(st;θ)和 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ),最后用 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)
指导agent做动作即可。整个过程价值网络 V π ( s t ; θ ) V_{\pi}(s_t;\theta) Vπ(st;θ)只是为了给策略网络 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)提供改进的方向,否则 π ( a ∣ s t ; θ ) \pi(a|s_t; \theta) π(a∣st;θ)自己是无法得知改进方向的。
基于此,我们的目标,就是使得价值网络
V
π
(
s
t
;
θ
)
V_{\pi}(s_t;\theta)
Vπ(st;θ)最大,也就是
max
V
π
(
s
t
;
θ
)
→
max
∑
a
∈
A
π
(
a
t
∣
s
t
;
θ
)
⋅
Q
π
(
s
t
,
a
t
)
\max \quad V_{\pi}(s_t;\theta) \rightarrow \max \quad \sum_{a \in \mathcal{A}} \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t)
maxVπ(st;θ)→maxa∈A∑π(at∣st;θ)⋅Qπ(st,at)
如何达到上面的目标呢,这就需要今天要讲的,策略梯度算法 (Policy Gradient)。
Policy Gradient 算法介绍
先说一个注意事项:
It is quite tricky to derive the policy gradient equation.,也就是要推导策略梯度方程是相当棘手的。
Policy Gradient的目的,就是要最大化状态价值函数。也就是要实现
max
V
π
(
s
t
;
θ
)
or
max
∑
a
∈
A
π
(
a
t
∣
s
t
;
θ
)
⋅
Q
π
(
s
t
,
a
t
)
\max \quad V_{\pi}(s_t;\theta) \quad \text{or } \max \quad \sum_{a \in \mathcal{A}} \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t)
maxVπ(st;θ)or maxa∈A∑π(at∣st;θ)⋅Qπ(st,at)
由于我们实际上是用policy network
π
(
a
t
∣
s
t
;
θ
)
\pi(a_t|s_t; \theta)
π(at∣st;θ)自下而上的构造出
V
π
(
s
t
;
θ
)
V_{\pi}(s_t;\theta)
Vπ(st;θ)去近似状态价值函数
V
π
(
s
t
)
V_{\pi}(s_t)
Vπ(st)。因此,其实参数就只有policy network
π
(
a
t
∣
s
t
;
θ
)
\pi(a_t|s_t; \theta)
π(at∣st;θ)中的
θ
\theta
θ,因此我们科技将其定义为
J
(
θ
)
J(\theta)
J(θ)。且
J
(
θ
)
=
E
S
[
V
(
S
;
θ
)
]
J(\theta) = \mathbb{E}_{S} [V(S; \theta)]
J(θ)=ES[V(S;θ)]
我们对
S
S
S进行积分,将
S
S
S消掉。因此,我们的目标其实就是最大化
J
(
θ
)
J(\theta)
J(θ),也就是
max
J
(
θ
)
\max \quad J(\theta)
maxJ(θ)
也就是我们要学习最好的
θ
\theta
θ使其最大化
J
(
θ
)
J(\theta)
J(θ)。
我们采用的方法就是Policy Gradient。
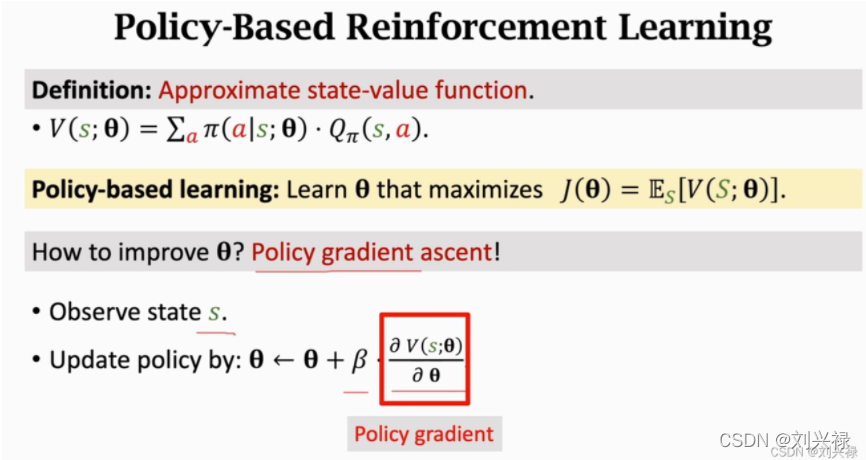
Policy Gradient的方法就是:在观测到状态 s s s的时候,我们求出目标函数 V ( s ; θ ) V(s;\theta) V(s;θ)的梯度,然后用梯度上升去更新 θ \theta θ使其最大化 V ( s ; θ ) V(s;\theta) V(s;θ)。
参考文献
- Sutton R S, McAllester D, Singh S, et al. Policy gradient methods for reinforcement learning with function approximation[J]. Advances in neural information processing systems, 1999, 12.
策略梯度Policy Gradient的关键是,如何求出策略梯度
∂
V
(
s
;
θ
)
∂
θ
\frac{\partial{V(s; \theta)}}{\partial{\theta}}
∂θ∂V(s;θ)
如何求出策略梯度呢?下面我们来推导策略梯度Policy Gradient的形式。
Policy Gradient 的推导
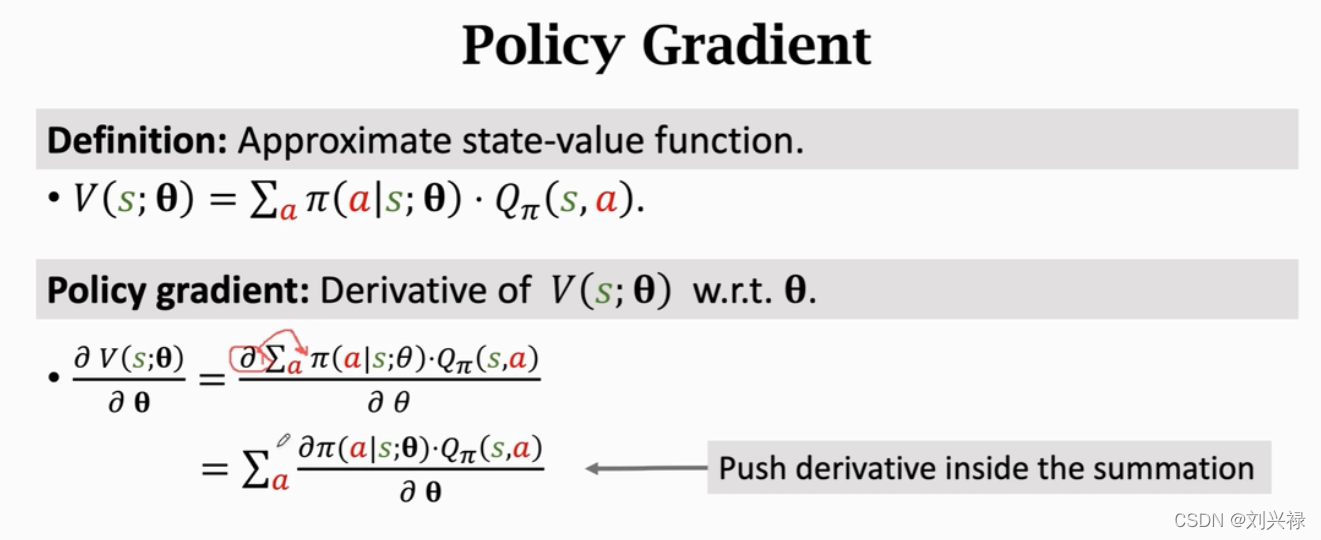
我们开始推导
∂
V
(
s
;
θ
)
∂
θ
=
∂
∑
a
∈
A
π
(
a
t
∣
s
t
;
θ
)
⋅
Q
π
(
s
t
,
a
t
)
∂
θ
和的导数等于导数的和,可以将偏导移进去
=
∑
a
∈
A
∂
π
(
a
t
∣
s
t
;
θ
)
⋅
Q
π
(
s
t
,
a
t
)
∂
θ
=
∑
a
∈
A
∂
π
(
a
t
∣
s
t
;
θ
)
⋅
Q
π
(
s
t
,
a
t
)
∂
θ
这里暂时假设
Q
(
s
t
,
a
t
)
与
θ
无关,是一种简化
=
∑
a
∈
A
∂
π
(
a
t
∣
s
t
;
θ
)
∂
θ
⋅
Q
π
(
s
t
,
a
t
)
=
∑
a
∈
A
[
π
(
a
t
∣
s
t
;
θ
)
⋅
1
π
(
a
t
∣
s
t
;
θ
)
]
∂
π
(
a
t
∣
s
t
;
θ
)
∂
θ
⋅
Q
π
(
s
t
,
a
t
)
等价转化
=
∑
a
∈
A
π
(
a
t
∣
s
t
;
θ
)
⋅
[
1
π
(
a
t
∣
s
t
;
θ
)
∂
π
(
a
t
∣
s
t
;
θ
)
∂
θ
]
⋅
Q
π
(
s
t
,
a
t
)
=
∑
a
∈
A
π
(
a
t
∣
s
t
;
θ
)
⋅
∂
log
π
(
a
t
∣
s
t
;
θ
)
∂
θ
⋅
Q
π
(
s
t
,
a
t
)
=
E
A
[
∂
log
π
(
A
∣
s
t
;
θ
)
∂
θ
⋅
Q
π
(
s
t
,
A
)
]
π
(
a
t
∣
s
t
;
θ
)
是概率分布
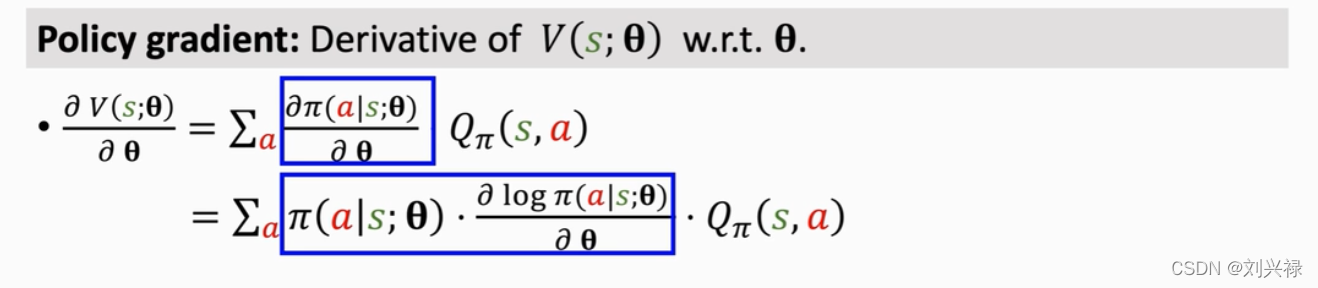
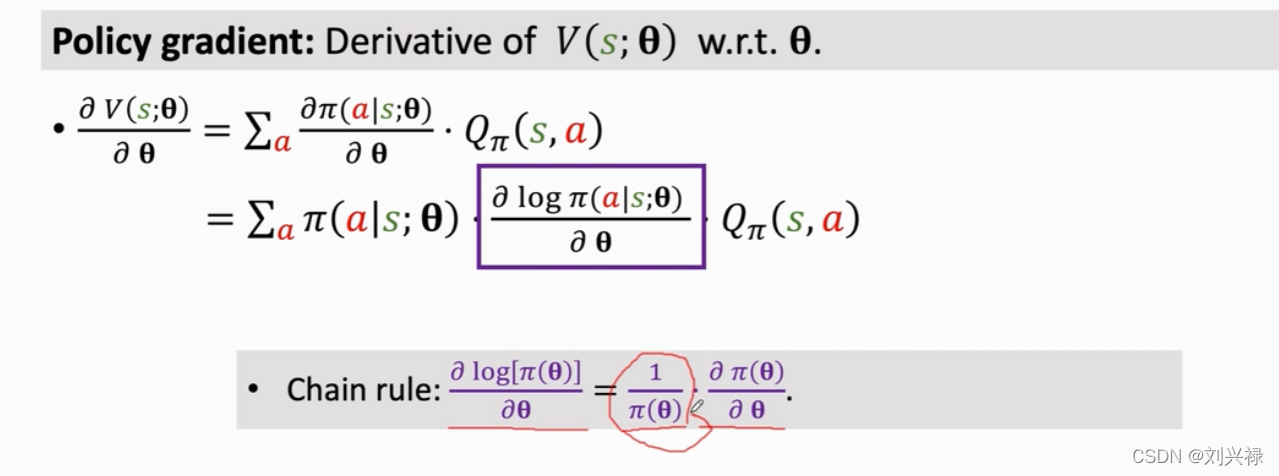
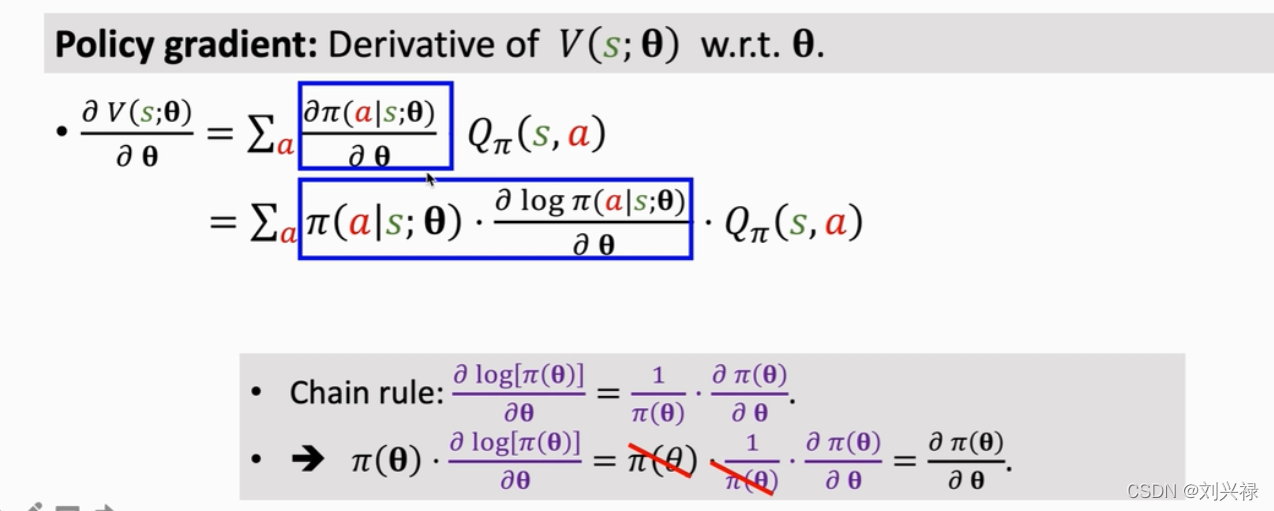
\begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} &= \frac{ \partial{ \sum_{a \in \mathcal{A}} \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t) } }{ \partial{\theta} } \hspace{1cm} \text{和的导数等于导数的和,可以将偏导移进去} \\ &=\frac{ \sum_{a \in \mathcal{A}}\partial \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t) }{ \partial{\theta} } \\ &=\sum_{a \in \mathcal{A}}\frac{ \partial \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t) }{ \partial{\theta} } \hspace{1cm} \text{这里暂时假设}Q(s_t,a_t)\text{与}\theta\text{无关,是一种简化} \\ &=\sum_{a \in \mathcal{A}}\frac{ \partial \pi(a_t|s_t; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s_t, a_t) \\ &=\sum_{a\in \mathcal{A}}{\left[ \pi (a_t|s_t;\theta )\cdot \frac{1}{\pi (a_t|s_t;\theta )} \right] \frac{\partial \pi (a_t|s_t;\theta )}{\partial \theta}}\cdot Q_{\pi}(s_t,a_t) \hspace{1cm} \text{等价转化} \\ &=\sum_{a\in \mathcal{A}}{\pi (a_t|s_t;\theta )\cdot \left[ \frac{1}{\pi (a_t|s_t;\theta )}\frac{\partial \pi (a_t|s_t;\theta )}{\partial \theta} \right]}\cdot Q_{\pi}(s_t,a_t) \\ &=\sum_{a\in \mathcal{A}}{\pi (a_t|s_t;\theta )\cdot \frac{\partial \log \pi (a_t|s_t;\theta )}{\partial \theta}}\cdot Q_{\pi}(s_t,a_t) \\ &=\mathbb{E}_A\left[ \frac{\partial \log \pi (A|s_t;\theta )}{\partial \theta}\cdot Q_{\pi}(s_t,A) \right] \hspace{1cm} \pi (a_t|s_t;\theta )\text{是概率分布} \end{aligned}
∂θ∂V(s;θ)=∂θ∂∑a∈Aπ(at∣st;θ)⋅Qπ(st,at)和的导数等于导数的和,可以将偏导移进去=∂θ∑a∈A∂π(at∣st;θ)⋅Qπ(st,at)=a∈A∑∂θ∂π(at∣st;θ)⋅Qπ(st,at)这里暂时假设Q(st,at)与θ无关,是一种简化=a∈A∑∂θ∂π(at∣st;θ)⋅Qπ(st,at)=a∈A∑[π(at∣st;θ)⋅π(at∣st;θ)1]∂θ∂π(at∣st;θ)⋅Qπ(st,at)等价转化=a∈A∑π(at∣st;θ)⋅[π(at∣st;θ)1∂θ∂π(at∣st;θ)]⋅Qπ(st,at)=a∈A∑π(at∣st;θ)⋅∂θ∂logπ(at∣st;θ)⋅Qπ(st,at)=EA[∂θ∂logπ(A∣st;θ)⋅Qπ(st,A)]π(at∣st;θ)是概率分布
最终我们有
∂ V ( s ; θ ) ∂ θ = E A [ ∂ log π ( A ∣ s t ; θ ) ∂ θ ⋅ Q π ( s t , A ) ] \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} =\mathbb{E}_A\left[ \frac{\partial \log \pi (A|s_t;\theta )}{\partial \theta}\cdot Q_{\pi}(s_t,A) \right] \end{aligned} ∂θ∂V(s;θ)=EA[∂θ∂logπ(A∣st;θ)⋅Qπ(st,A)]
下面的图片也是同样的推导过程。

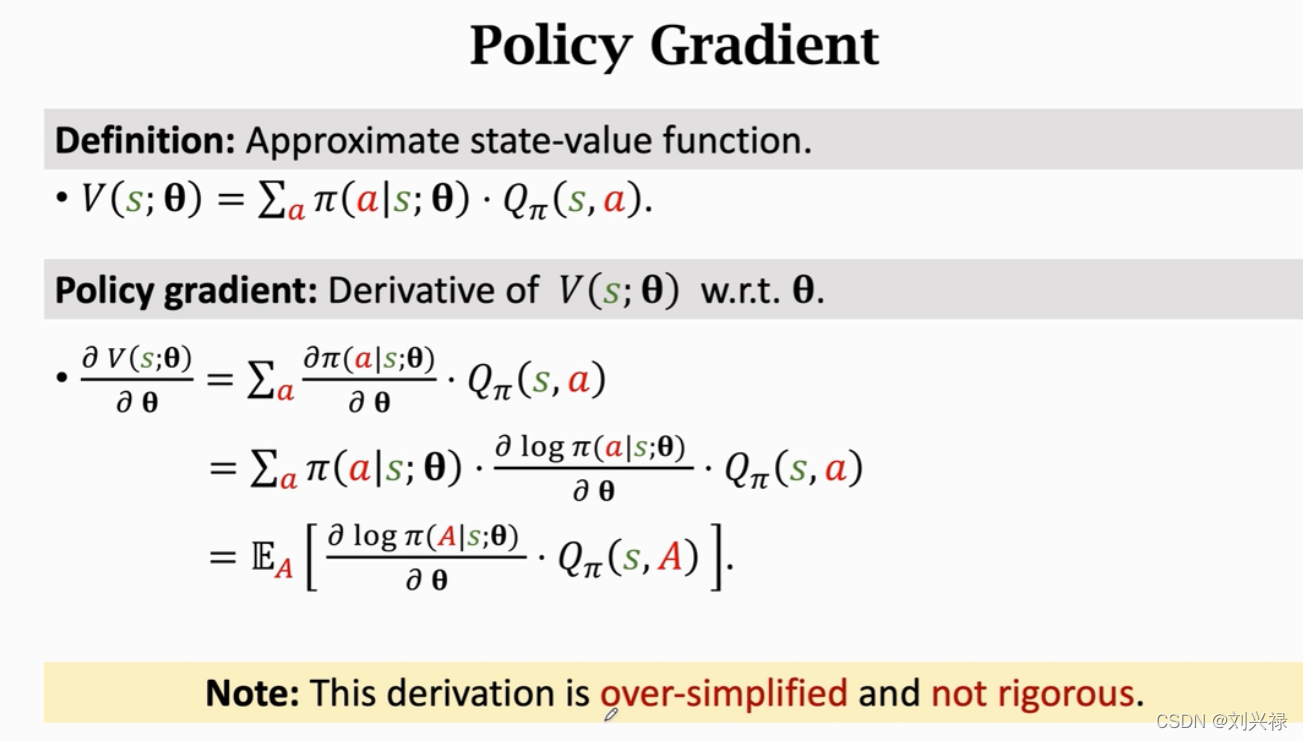
根据上述推导,我们有
∂ V ( s ; θ ) ∂ θ = E A [ ∂ log π ( A ∣ s t ; θ ) ∂ θ ⋅ Q π ( s t , A ) ] \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} =\mathbb{E}_A\left[ \frac{\partial \log \pi (A|s_t;\theta )}{\partial \theta}\cdot Q_{\pi}(s_t,A) \right] \end{aligned} ∂θ∂V(s;θ)=EA[∂θ∂logπ(A∣st;θ)⋅Qπ(st,A)]
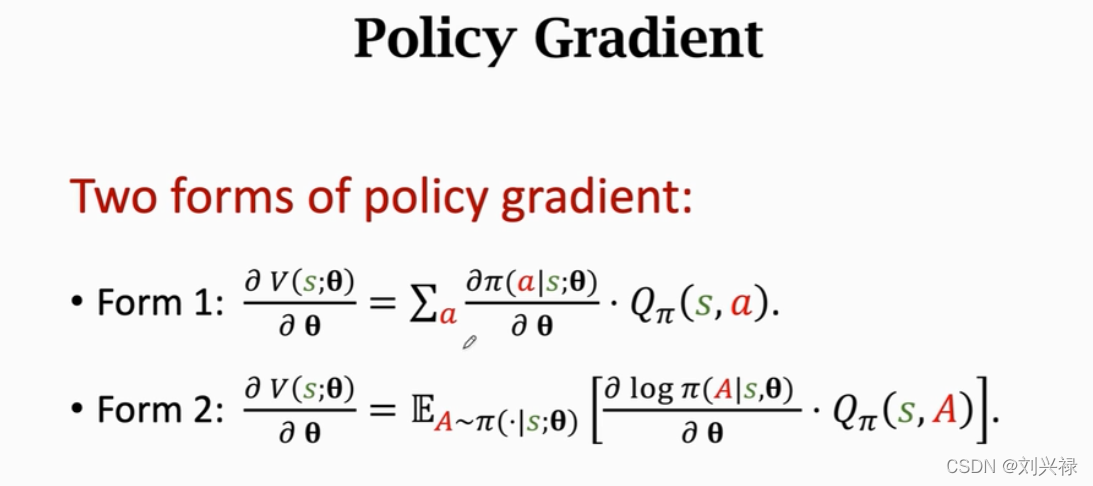
因此,策略梯度的形式有下面两种:
- 第1种:
对每个动作a求和的形式: ∂ V ( s ; θ ) ∂ θ = ∑ a ∈ A ∂ π ( a ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ) \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}}=\sum_{a \in \mathcal{A}}\frac{ \partial \pi(a|s; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s, a) \end{aligned} ∂θ∂V(s;θ)=a∈A∑∂θ∂π(a∣s;θ)⋅Qπ(s,a)
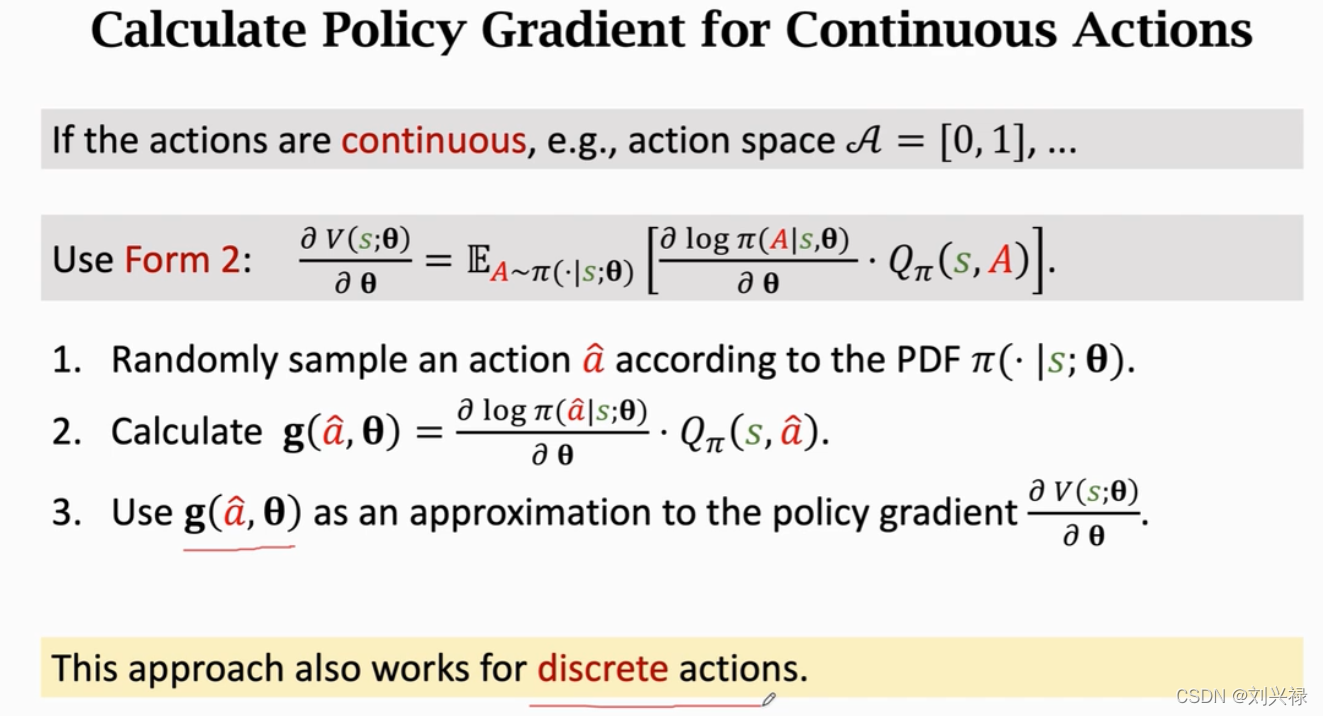
这种形式适用于离散动作的情况,因为得对所有动作 a a a都求导然后加和。- 第2种: ∂ V ( s ; θ ) ∂ θ = E A ∼ π ( ⋅ ∣ s ; θ ) [ ∂ log π ( A ∣ s ; θ ) ∂ θ ⋅ Q π ( s , A ) ] \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} =\mathbb{E}_{A\sim \pi(\cdot|s;\theta)}\left[ \frac{\partial \log \pi (A|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,A) \right] \end{aligned} ∂θ∂V(s;θ)=EA∼π(⋅∣s;θ)[∂θ∂logπ(A∣s;θ)⋅Qπ(s,A)]
这种形式比较常用,比较适用于连续动作(当然离散动作也可以用),因为这是一个期望的形式,我们可以用蒙特卡洛近似的形式,按照策略函数 A ∼ π ( ⋅ ∣ s ; θ ) A\sim \pi(\cdot|s;\theta) A∼π(⋅∣s;θ)进行随机抽样,取一个动作 a a a作为样本,去用随机梯度去代替期望。一个样本也是期望的无偏估计。
Policy Gradient 的具体计算
Policy Gradient的计算是基于上面介绍的两种梯度形式的。
分为离散动作和连续动作。
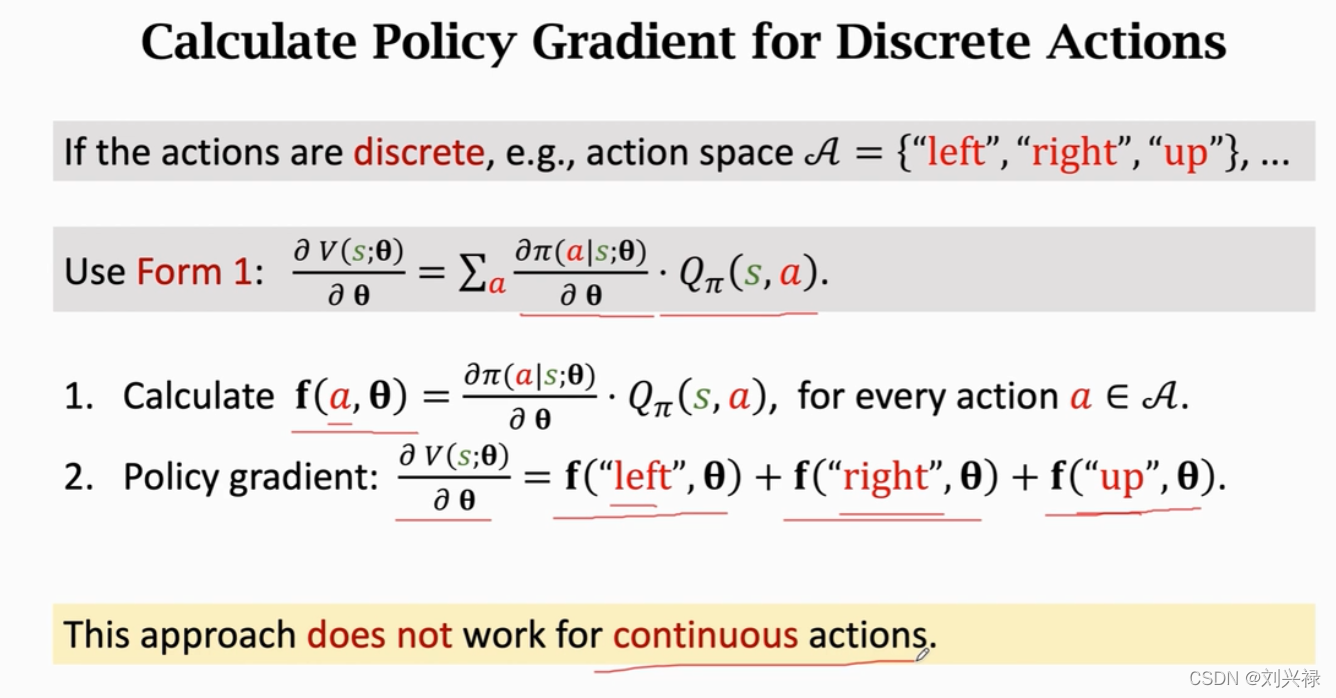
Policy Gradient 的计算: 离散动作
离散动作下,可以使用连加公式
∂
V
(
s
;
θ
)
∂
θ
=
∑
a
∈
A
∂
π
(
a
∣
s
;
θ
)
∂
θ
⋅
Q
π
(
s
,
a
)
\begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}}=\sum_{a \in \mathcal{A}}\frac{ \partial \pi(a|s; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s, a) \end{aligned}
∂θ∂V(s;θ)=a∈A∑∂θ∂π(a∣s;θ)⋅Qπ(s,a)
计算策略梯度。
我们以超级马里奥为例子,假设可做的动作为[left, right, up], 即
A
=
\mathcal{A} =
A=[left, right, up]。我们按照下面的方式计算策略梯度
- 令在动作 a a a时的梯度的分量为 f ( a , θ ) \mathbf{f}(a, \theta) f(a,θ),即
f ( a , θ ) = ∂ π ( a ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ) \begin{aligned} \mathbf{f}(a, \theta)=\frac{ \partial \pi(a|s; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s, a) \end{aligned} f(a,θ)=∂θ∂π(a∣s;θ)⋅Qπ(s,a)
则有(注意,这里我们其实是假设 Q π ( s , a ) Q_{\pi}(s, a) Qπ(s,a)是已知的,但是实际上他是未知的)
∂ V ( s ; θ ) ∂ θ = ∑ a ∈ A f ( a , θ ) \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}}=\sum_{a \in \mathcal{A}} \mathbf{f}(a, \theta) \end{aligned} ∂θ∂V(s;θ)=a∈A∑f(a,θ)
- 第一步:我们对每个动作 a ∈ A a \in \mathcal{A} a∈A,都计算 f ( a , θ ) \mathbf{f}(a, \theta) f(a,θ);
这里,其实就是对每个动作a,都计算 ∂ π ( a ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ) \frac{ \partial \pi(a|s; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s, a) ∂θ∂π(a∣s;θ)⋅Qπ(s,a)- 第二步:我们将所有 f ( a , θ ) \mathbf{f}(a, \theta) f(a,θ)求和,得到 ∂ V ( s ; θ ) ∂ θ \frac{\partial{V(s; \theta)}}{\partial{\theta}} ∂θ∂V(s;θ),也就是
∂ V ( s ; θ ) ∂ θ = ∑ a ∈ A f ( a , θ ) = f ( left , θ ) + f ( right , θ ) + f ( up , θ ) \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}}&=\sum_{a \in \mathcal{A}} \mathbf{f}(a, \theta) \\&= \mathbf{f}(\text{left}, \theta) + \mathbf{f}(\text{right}, \theta) + \mathbf{f}(\text{up}, \theta) \end{aligned} ∂θ∂V(s;θ)=a∈A∑f(a,θ)=f(left,θ)+f(right,θ)+f(up,θ)
但是这里是需要注意的,上述的梯度计算,基于Pytorch的自动求导更新可能是不适用的,因为Pytorch可以调用函数loss.backward()实现自动的梯度下降更新,所以调用Pytorch实现这个的时候只需要定义好loss function就可以,然后让loss.backward()去自动地更新参数。需要注意下面几点。
注意是梯度上升,因此loss需要做成负的,加一个负号。也就是,我们的目标本来是 max J ( θ ) = max V π ( s t ; θ ) \max J(\theta) = \max\,\, V_{\pi}(s_t;\theta) maxJ(θ)=maxVπ(st;θ),但是pytorch里面默认是 min loss function \min \text{loss function} minloss function,为了实现梯度上升,我们需要将loss function其改成 min − J ( θ ) = min − V π ( s t ; θ ) \min -J(\theta) = \min\,\, -V_{\pi}(s_t;\theta) min−J(θ)=min−Vπ(st;θ)loss function其实就是目标函数,因此,在pytorch中,我们需要将loss function设置成为
loss = − J ( θ ) = − V π ( s t ; θ ) = − ∑ a ∈ A π ( a t ∣ s t ; θ ) ⋅ Q π ( s t , a t ) \text{loss} = -J(\theta) = -V_{\pi}(s_t;\theta) = -\sum_{a \in \mathcal{A}} \pi(a_t|s_t; \theta) \cdot Q_{\pi}(s_t, a_t) loss=−J(θ)=−Vπ(st;θ)=−a∈A∑π(at∣st;θ)⋅Qπ(st,at)
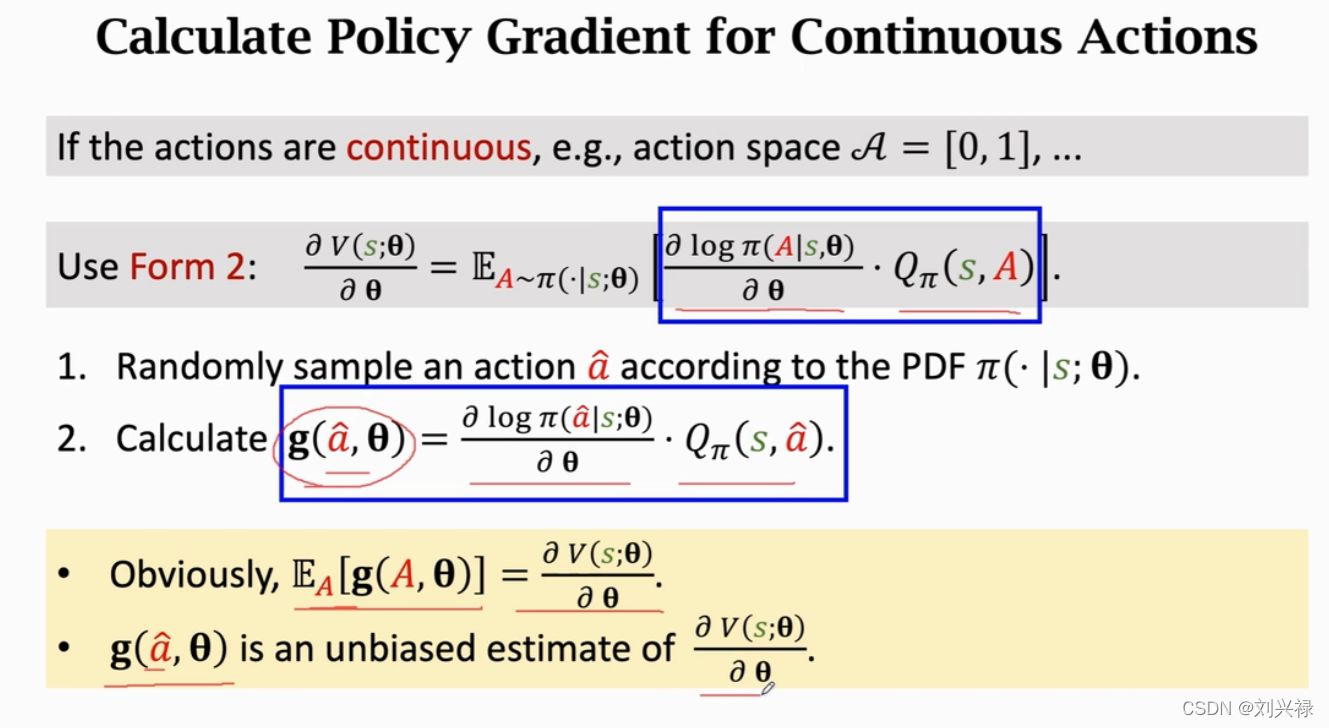
Policy Gradient 的计算: 连续动作
上节介绍的梯度计算方法只适用于离散动作空间。对于连续动作空间,上述计算方法不再适用。
本节就来介绍连续动作空间下如何计算Policy Gradient。
之前我们经过推导,得到策略梯度的形式2:
∂
V
(
s
;
θ
)
∂
θ
=
E
A
∼
π
(
⋅
∣
s
;
θ
)
[
∂
log
π
(
A
∣
s
;
θ
)
∂
θ
⋅
Q
π
(
s
,
A
)
]
\begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} =\mathbb{E}_{A\sim \pi(\cdot|s;\theta)}\left[ \frac{\partial \log \pi (A|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,A) \right] \end{aligned}
∂θ∂V(s;θ)=EA∼π(⋅∣s;θ)[∂θ∂logπ(A∣s;θ)⋅Qπ(s,A)]
因为这是一个期望的形式,我们可以用蒙特卡洛近似的形式,按照策略函数
A
∼
π
(
⋅
∣
s
;
θ
)
A\sim \pi(\cdot|s;\theta)
A∼π(⋅∣s;θ)进行随机抽样,取一个动作
a
a
a作为样本,去用随机梯度去代替期望。一个样本也是期望的无偏估计。
另外,需要注意,除了一个样本是无偏估计以外,一个随机抽样的均值,也是无偏估计。
首先,我们用
g
(
a
;
θ
)
\mathbf{g}(a; \theta)
g(a;θ)表示
∂
V
(
s
;
θ
)
∂
θ
\frac{\partial{V(s; \theta)}}{\partial{\theta}}
∂θ∂V(s;θ),也就是令
g
(
a
;
θ
)
=
∂
V
(
s
;
θ
)
∂
θ
\begin{aligned} \mathbf{g}(a; \theta) = \frac{\partial{V(s; \theta)}}{\partial{\theta}} \end{aligned}
g(a;θ)=∂θ∂V(s;θ)
因此,具体操作如下:
连续动作下的策略梯度 (离散动作下也适用)
- 根据策略网络 π ( ⋅ ∣ s ; θ ) \pi(\cdot|s;\theta) π(⋅∣s;θ) (这相当于一个概率密度函数),随机抽样,得到一个action a ^ \hat{a} a^。( a ^ \hat{a} a^
是随机变量A A A的一个观测值)- 计算 g ( a ^ ; θ ) = ∂ log π ( a ^ ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ^ ) \mathbf{g}(\hat{a}; \theta) = \frac{\partial \log \pi (\hat{a}|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,\hat{a}) g(a^;θ)=∂θ∂logπ(a^∣s;θ)⋅Qπ(s,a^)
这里,显然
– E A [ g ( A ; θ ) ] = ∂ V ( s ; θ ) ∂ θ \mathbb{E}_{A}[\mathbf{g}(A; \theta)] = \frac{\partial{V(s; \theta)}}{\partial{\theta}} EA[g(A;θ)]=∂θ∂V(s;θ)
– g ( a ^ ; θ ) \mathbf{g}(\hat{a}; \theta) g(a^;θ)是 ∂ V ( s ; θ ) ∂ θ \frac{\partial{V(s; \theta)}}{\partial{\theta}} ∂θ∂V(s;θ)的一个无偏估计。- 用 g ( a ^ ; θ ) \mathbf{g}(\hat{a}; \theta) g(a^;θ)取近似策略梯度 ∂ V ( s ; θ ) ∂ θ \frac{\partial{V(s; \theta)}}{\partial{\theta}} ∂θ∂V(s;θ)。
这种形式比较常用,比较适用于连续动作(当然离散动作也可以用),
同样地,在
Pytorch中,如何来设置loss function呢?还是那个原则,就是看目标函数。由于,我们一定是对目标函数求导(目标函数其实就是loss),因此我们反推
∂ V ( s ; θ ) ∂ θ ≈ g ( a ^ ; θ ) = ∂ log π ( a ^ ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ^ ) ⟹ ∂ V ( s ; θ ) ∂ θ ≈ ∂ log π ( a ^ ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ^ ) \begin{aligned} &\frac{\partial{V(s; \theta)}}{\partial{\theta}} \approx \mathbf{g}(\hat{a}; \theta) = \frac{\partial \log \pi (\hat{a}|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,\hat{a}) \\ &\Longrightarrow \\ & \frac{\partial{V(s; \theta)}}{\partial{\theta}} \approx \frac{\partial \log \pi (\hat{a}|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,\hat{a}) \end{aligned} ∂θ∂V(s;θ)≈g(a^;θ)=∂θ∂logπ(a^∣s;θ)⋅Qπ(s,a^)⟹∂θ∂V(s;θ)≈∂θ∂logπ(a^∣s;θ)⋅Qπ(s,a^)
我们两边同时将偏导数去掉,得到
∂ V ( s ; θ ) ∂ θ ≈ g ( a ^ ; θ ) = ∂ log π ( a ^ ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ^ ) ⟹ V ( s ; θ ) ≈ [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) \begin{aligned} &\frac{\partial{V(s; \theta)}}{\partial{\theta}} \approx \mathbf{g}(\hat{a}; \theta) = \frac{\partial \log \pi (\hat{a}|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,\hat{a}) \\ &\Longrightarrow \\ & V(s; \theta) \approx \left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) \end{aligned} ∂θ∂V(s;θ)≈g(a^;θ)=∂θ∂logπ(a^∣s;θ)⋅Qπ(s,a^)⟹V(s;θ)≈[logπ(a^∣s;θ)]⋅Qπ(s,a^)
再次强调,这里其实就是对状态-价值函数做了一个蒙特卡洛近似。可以理解为: [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) \left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) [logπ(a^∣s;θ)]⋅Qπ(s,a^)是 V ( s ; θ ) V(s; \theta) V(s;θ)的无偏估计。用一个样本的值,去近似整体的期望。
因此,我们的目标函数就可以变化为
max V ( s ; θ ) ≈ max [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) \begin{aligned} \max \,\,\, V(s; \theta) \quad \approx \quad \max \,\,\, \left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) \end{aligned} maxV(s;θ)≈max[logπ(a^∣s;θ)]⋅Qπ(s,a^)
由于Pytorch默认梯度下降,而我们是要梯度上升,因此我们需要将目标函数变化为
min − V ( s ; θ ) ≈ min − [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) \begin{aligned} \min \,\,\, -V(s; \theta) \quad \approx \quad \min \,\,\, -\left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) \end{aligned} min−V(s;θ)≈min−[logπ(a^∣s;θ)]⋅Qπ(s,a^)
因此,我们需要将loss function设置为
loss function = − V ( s ; θ ) ≈ − [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) \begin{aligned} \text{loss function} &= -V(s; \theta) \\ & \approx -\left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) \end{aligned} loss function=−V(s;θ)≈−[logπ(a^∣s;θ)]⋅Qπ(s,a^)
具体做法为:
- 根据根据策略网络 π ( ⋅ ∣ s ; θ ) \pi(\cdot|s;\theta) π(⋅∣s;θ),随机抽样,得到一个action a ^ \hat{a} a^;
- 然后利用策略网络 π \pi π计算出选择动作 a ^ \hat{a} a^的概率 π ( a ^ ∣ s ; θ ) \pi (\hat{a}|s;\theta ) π(a^∣s;θ)
- 之后对 π ( a ^ ∣ s ; θ ) \pi (\hat{a}|s;\theta ) π(a^∣s;θ)取对数,得到 log π ( a ^ ∣ s ; θ ) \log \pi (\hat{a}|s;\theta ) logπ(a^∣s;θ);
- 将对数动作概率 log π ( a ^ ∣ s ; θ ) \log \pi (\hat{a}|s;\theta ) logπ(a^∣s;θ)与动作价值 Q π ( s , a ^ ) Q_{\pi}(s,\hat{a}) Qπ(s,a^)相乘,加一个负号,得到 − [ log π ( a ^ ∣ s ; θ ) ] ⋅ Q π ( s , a ^ ) -\left[\log \pi (\hat{a}|s;\theta ) \right]\cdot Q_{\pi}(s,\hat{a}) −[logπ(a^∣s;θ)]⋅Qπ(s,a^)。
这样就完成了policy gradient下loss function的设置。
问题: Q ( s , a ) Q(s, a) Q(s,a)如何计算?
- 在上面的推导中,我们始终假设 Q ( s , a ) Q(s, a) Q(s,a)已知。但是实际上, Q ( s , a ) Q(s, a) Q(s,a)我们是不知道的(如果 Q ( s , a ) Q(s, a) Q(s,a)都提前知道了,直接就可以用 Q ( s , a ) Q(s, a) Q(s,a)指导agent做动作了,还忙活搞策略网络 π ( a ^ ∣ s ; θ ) \pi (\hat{a}|s;\theta ) π(a^∣s;θ)干啥,哈哈)。
- 下面我们将在算法迭代的介绍中,介绍如何计算 Q ( s , a ) Q(s, a) Q(s,a)。
Policy Gradient: 算法迭代
这一部分来具体介绍Policy Gradient的算法迭代过程。
Policy Gradient: 算法迭代 (自己实现梯度下降的情况)
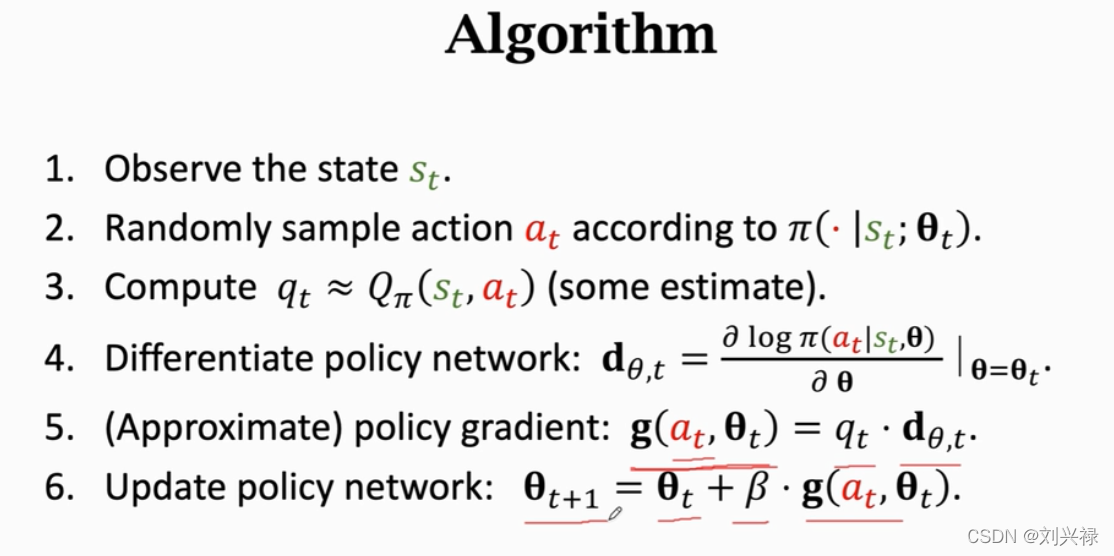
- 观察到当前时刻的状态 s t s_t st;
- 根据根据策略网络 π ( ⋅ ∣ s ; θ ) \pi(\cdot|s;\theta) π(⋅∣s;θ),随机抽样,得到一个action a t ^ \hat{a_t} at^;
- 计算动作价值 q t ≈ Q π ( s t , a t ^ ) q_t \approx Q_{\pi}(s_t, \hat{a_t}) qt≈Qπ(st,at^),
这里需要用一些估计的方法(更高级的算法中,使用神经网络去估计)。- 对策略网络求导( d θ , t \mathbf{d}_{\theta, t} dθ,t是第 t t t时刻,loss function 对神经网络参数 θ \theta θ的导数) d θ , t = ∂ log π ( a ^ t ∣ s t ; θ ) ∂ θ ∣ θ = θ t \mathbf{d}_{\theta, t}=\frac{\partial \log \pi (\hat{a}_t|s_t;\theta )}{\partial \theta}|_{\theta =\theta _t} dθ,t=∂θ∂logπ(a^t∣st;θ)∣θ=θt.
- 计算策略梯度(实际上是估计策略梯度),估计表达式为 g ( a t ^ ; θ t ) = q t ⋅ d θ , t \mathbf{g}(\hat{a_t}; \theta_t) = q_t \cdot \mathbf{d}_{\theta, t} g(at^;θt)=qt⋅dθ,t
其实,就是估计 ∂ log π ( a ^ ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ^ ) \frac{\partial \log \pi (\hat{a}|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,\hat{a}) ∂θ∂logπ(a^∣s;θ)⋅Qπ(s,a^)- 用梯度上升更新策略网络:
θ t + 1 ← θ t + β ⋅ g ( a t ^ ; θ t ) \theta_{t+1} \leftarrow \theta_{t} + \beta \cdot \mathbf{g}(\hat{a_t}; \theta_t) θt+1←θt+β⋅g(at^;θt).
上面的过程,是自己写梯度下降,做反向传播的过程。
如果说我们调用pytorch来实现的话,步骤会简单一些,因为调用loss.backward()函数,神经网络会自动完成反向传播。因此,过程变化为
Policy Gradient: 算法迭代 (
调用Pytorch的情形)
- 观察到当前时刻的状态 s t s_t st;
- 根据根据策略网络 π ( ⋅ ∣ s ; θ ) \pi(\cdot|s;\theta) π(⋅∣s;θ),随机抽样,得到一个action a t ^ \hat{a_t} at^;( a ^ \hat{a} a^
是随机变量A A A的一个观测值)- 计算动作价值 q t ≈ Q π ( s t , a t ^ ) q_t \approx Q_{\pi}(s_t, \hat{a_t}) qt≈Qπ(st,at^),
这里需要用一些估计的方法(更高级的算法中,使用神经网络去估计)。- 利用策略网络 π \pi π计算出选择动作 a ^ \hat{a} a^的概率 π ( a ^ ∣ s ; θ ) \pi (\hat{a}|s;\theta ) π(a^∣s;θ),之后对 π ( a ^ ∣ s ; θ ) \pi (\hat{a}|s;\theta ) π(a^∣s;θ)取对数,得到 log π ( a ^ ∣ s ; θ ) \log \pi (\hat{a}|s;\theta ) logπ(a^∣s;θ);
- 设置策略网络的
loss function为:
loss function = ( ≈ ) − [ log π ( a ^ ∣ s ; θ ) ] ⋅ q t \begin{aligned} \text{loss function} = (\approx ) -\left[\log \pi (\hat{a}|s;\theta ) \right]\cdot q_t \end{aligned} loss function=(≈)−[logπ(a^∣s;θ)]⋅qt- 用梯度下降更新策略网络(本来是梯度上升,但是由于我们将 max o b j \max obj maxobj变成了 min − o b j \min -obj min−obj, 因此就可以是梯度下降了):调用函数
loss.backward()即可。
上面的迭代中,我们提到,我们需要有一个估计的方法,用 q t q_t qt去估计动作价值 Q π ( s , a ^ ) Q_{\pi}(s,\hat{a}) Qπ(s,a^)。那么 q t q_t qt应该如何去计算呢?
可以用下图提到的方法。
我们来总结一下上面的方法。
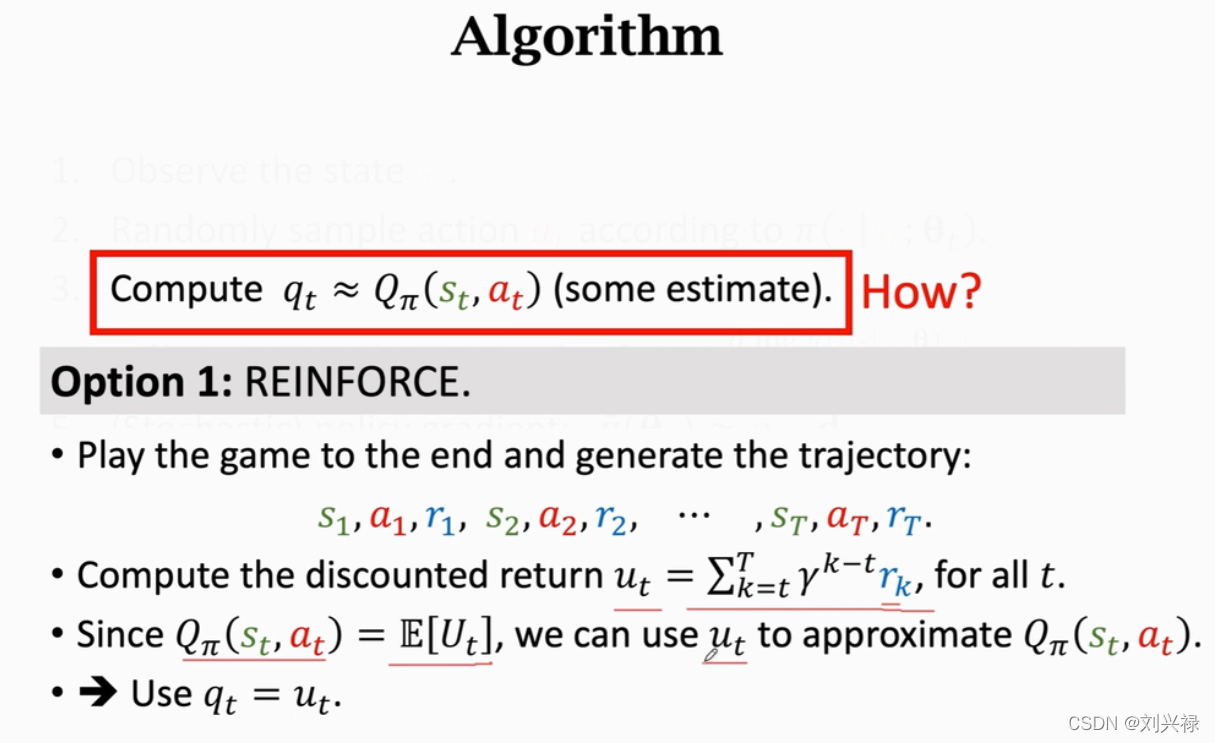
方法1:REINFORCE
- 我们让agent玩一局游戏,并且记录状态、动作、奖励的轨迹,也就是记录 s 1 , a 1 , r 1 , s 2 , a 2 , r 2 , ⋯ , s T , a T , r T . s_1, a_1, r_1, s_2, a_2, r_2, \cdots, s_T, a_T, r_T. s1,a1,r1,s2,a2,r2,⋯,sT,aT,rT.
其中, T T T是最大的尝试次数,为了避免游戏一直结束不了。- 我们基于这个轨迹计算,对所有 t t t,也就是 ∀ t ∈ T \forall t \in T ∀t∈T计算其折扣回报 u t = ∑ k = t T γ k − t r k u_t = \sum_{k=t}^{T}\gamma^{k-t} r_k ut=k=t∑Tγk−trk
- 我们用 u t u_t ut去近似 Q ( s t , a t ) Q(s_t, a_t) Q(st,at),也就是令 q t = u t q_t = u_t qt=ut。这是因为 Q π ( s t , a t ) = E [ U t ] Q_{\pi}(s_t, a_t) = \mathbb{E}[U_t] Qπ(st,at)=E[Ut],因此,我们可以用随机变量 U t U_t Ut的一个实现值 u t u_t ut去评估 Q ( s t , a t ) Q(s_t, a_t) Q(st,at),这也是无偏估计。
这也就是所谓的REINFORCE算法。
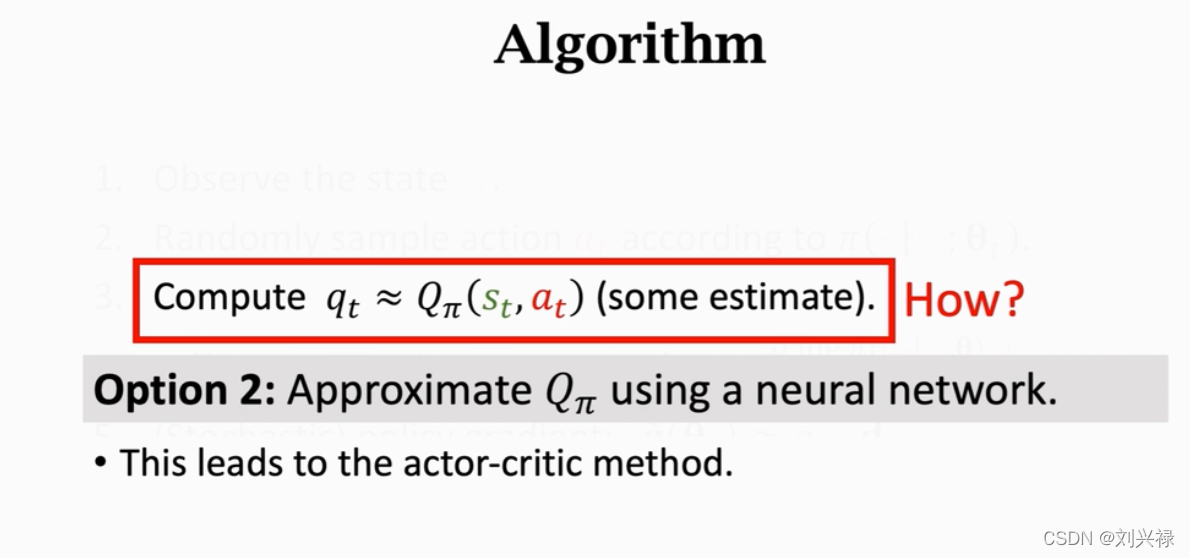
方法2:Actor-Critic算法
- 我们用一个神经网络 Q ( s , a ; θ ) Q(s, a; \theta) Q(s,a;θ)去近似动作价值函数 Q ( s t , a t ) Q(s_t, a_t) Q(st,at),这也就是所谓的Actor-Critic算法。
这个再下文中进行介绍。
Policy Gradient实战:求解Cart-Pole问题
搭建策略网络
策略网络
π
(
s
,
a
;
θ
)
\pi(s, a; \theta)
π(s,a;θ)是一个概率分布,满足
∑
a
∈
A
π
(
a
∣
s
;
θ
)
=
1
\sum_{a \in \mathcal{A}}\pi(a|s; \theta) = 1
a∈A∑π(a∣s;θ)=1
下面是我自己写的网络结构部分代码
'''
Author: Liu Xinglu
Institute: Tsinghua University
Email: hsinglul@163.com
Date: 2022-02-28
'''
""" 策略梯度算法方差很大,设置seed以保证复现性 """
import gym
import torch
import torch.nn as nn
import numpy as np
from collections import deque
import random
from itertools import count
import torch.nn.functional as F
# from tensorboardX import SummaryWriter
from torch.utils.tensorboard import SummaryWriter
import math
"""
This code is the basic implementation of the Policy Gradient algorithm
"""
class Policy_Network(nn.Module):
def __init__(self):
super(Network, self).__init__()
'''
Input: state = (Cart Position, Cart Velocity, Pole Angle, Pole Angular Velocity )
Output: probability of [left, right]
'''
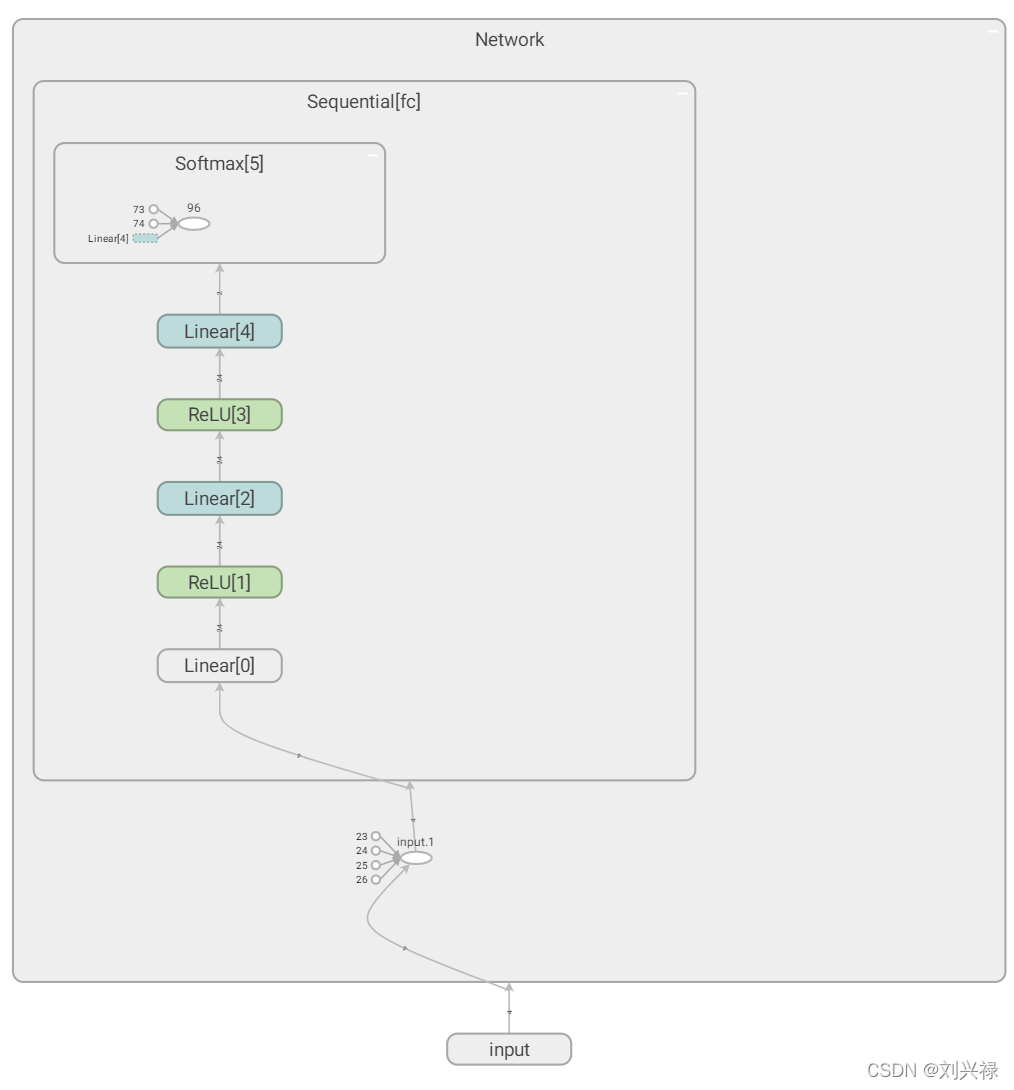
self.fc = nn.Sequential(
nn.Linear(4, 24),
nn.ReLU(),
nn.Linear(24, 24),
nn.ReLU(),
nn.Linear(24, 2),
nn.Softmax(dim=-1) # 按照输出向量的最后一个维度进行softmax,最后输出动作的概率
# # 我们也可以在forward函数里面定义softmax
)
"""
the loss is actually the objective function of the neural network
In this problem, we pursue:
the state value V(s; theta) is maximized
where V(s; theta) = sum_{a} { pi (s|a; theta) * Q(s, a) }
这里我们训练的是 策略网络 pi (s|a; theta), Q(s, a)我们用一些近似的方法去评估即可
Thus, the loss can be set to
loss = V(s; theta)
= sum_{a} { pi (s|a; theta) * Q(s, a) }
目前还设置不了,等到真正用到的时候再去设置
"""
self.loss = None
self.optimizer = torch.optim.Adam(self.parameters(), lr=0.001)
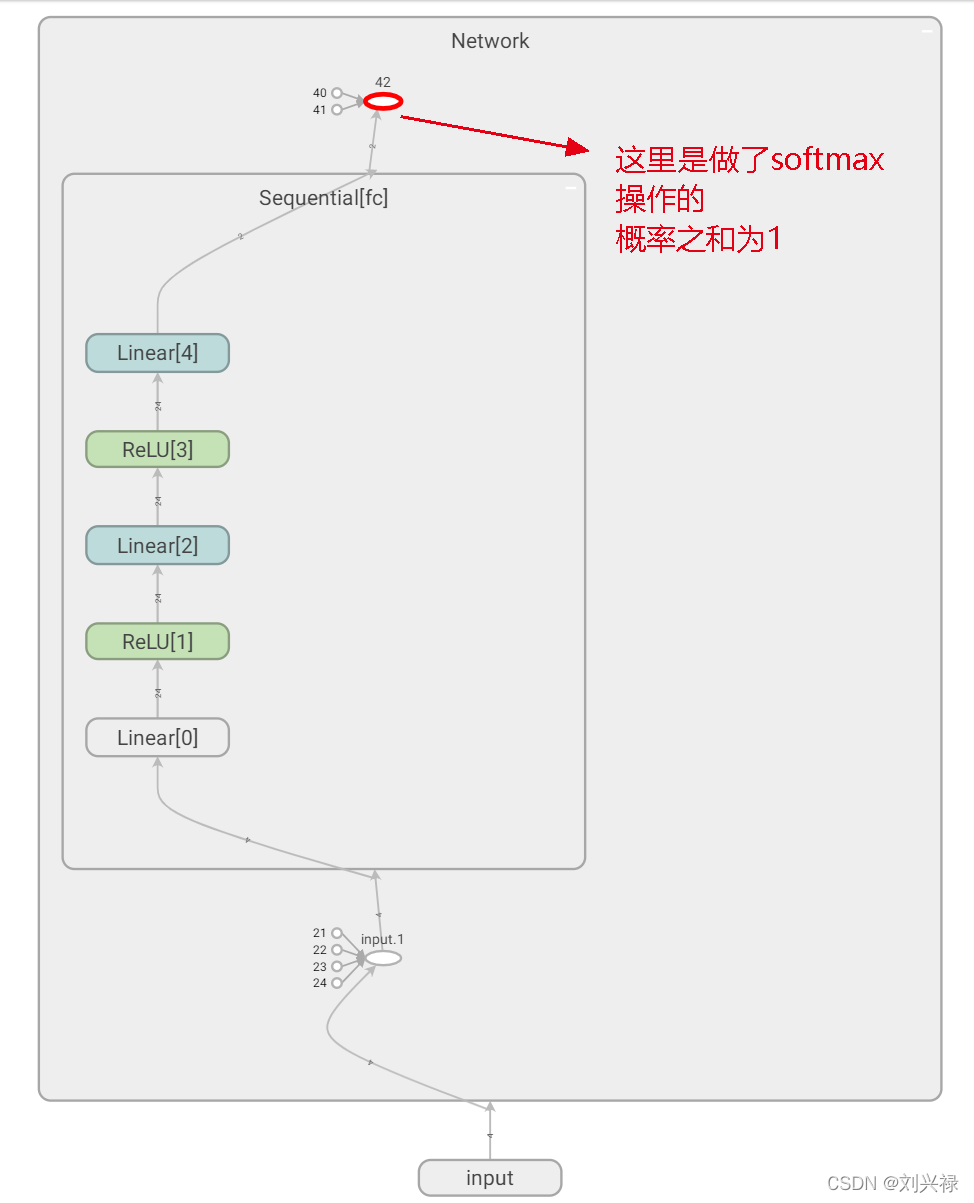
def forward(self, state):
return self.fc(torch.Tensor(state))
# 如果在forward函数里面定义softmax,用下面的
# def forward(self, state):
# output = self.fc(torch.Tensor(state))
# output = torch.softmax(output, dim=-1) # 我们在forward函数里面定义softmax
#
# return output
def learn(self, state, reward, state_, gamma):
'''
Update policy network by TD learning.
q_t = Q(s, a; theta): 是value network q(s,a; theta)的评估,是不太靠谱的
q_target = r + gamma * q_t+1 : 这个由r的部分是真实的,所以我们认为他是相对靠谱的,我们将其作为标签
我们的目的,就是让 q_t 尽量接近标签 q_target
因此,目标函数是 min 1/2 * (q_t - q_target) ** 2
也就是 loss function = 1/2 * (q_t - q_target) ** 2
:param state: the current state
:param reward: the immediate reward obtained from the environment
:param state_: the new state after performing the action a
:param gamma: the discount factor
:return: TD_error: return TD_error, TD error后续会被用于更新 policy network
'''
q_target_next = 0
with torch.no_grad():
q_target_next = self.forward(torch.Tensor(state_)).detach()
q_value = self.forward(torch.Tensor(state)) # 由于要对q_value求导,因此,这里不能用.detach()
q_value_clone = self.forward(torch.Tensor(state)).detach() # 这个是用来计算TD_error,传给别人的,因此深拷贝
q_target = reward + gamma * q_target_next # 用Target_net来计算TD-target
TD_error = q_target - q_value_clone
loss = self.MSELoss(q_value, q_target) # 计算loss
self.optimizer.zero_grad() # 将DQN上步的梯度清零
loss.backward(retain_graph=True) # DQN反向传播,更新参数
self.optimizer.step() # DQN更新参数
return TD_error
def random_choose_action(self, state):
'''
To select the next action under state s randomly under the PDF of policy.
For Cart-Pole problem, the available actions are [left, right]
:param state: the current state
:return: int 类型, the selected next action ID
'''
action_ID = 0
with torch.no_grad():
"""Example: the action_prob = tensor([0.5191, 0.5949]), we can randomly sample """
softmax_action_probs = self.forward(torch.Tensor(state))
""" np.random.choice([0, 1], size=1, p=softmax_action_probs) 表示在集合[0,1]中,以概率分布p随机抽取size的样本"""
softmax_action_probs = softmax_action_probs.numpy().tolist()
softmax_action_probs[0] = round(softmax_action_probs[0], 2)
softmax_action_probs[1] = 1 - softmax_action_probs[0]
action_ID = np.random.choice([0, 1], size=1, p=softmax_action_probs)[0] # 注意,这个返回的是数组array([1]),我们只要int类型,因此加了[0]
return action_ID
'''
# 这部分是为了较快可视化一下神经网络的结构
env = gym.envs.make('CartPole-v1')
env = env.unwrapped
policy_network = Network() # policy_network, 需要训练的网络
writer = SummaryWriter("logs_policy_network_Cart_Pole") # 注意tensorboard的部分
state = env.reset() # 重置环境
writer.add_graph(model=policy_network, input_to_model=torch.Tensor(state))
writer.close()
'''
我们用tensorboard进行可视化
打开Pycharm的terminal,cd到log所在的目录logs_policy_network_Cart_Pole下,执行
tensorboard --logdir=logs_policy_network_Cart_Pole
这个是我在Network的构造函数_init_部分实现softmax的情况。
这个是我在forward部分实现softmax的情况。
Pytorch的Variable
Variable就是变量的意思。实质上也就是可以变化的量,区别于int变量,它是一种可以变化的变量,这正好就符合了反向传播,参数更新的属性。
pytorch都是由tensor计算的,而tensor里面的参数都是Variable的形式。如果用Variable计算的话,那返回的也是一个同类型的Variable。
注:tensor不能反向传播,variable可以反向传播。
Variable计算时,它会逐渐地生成计算图。这个图就是将所有的计算节点都连接起来,最后进行误差反向传递的时候,一次性将所有Variable里面的梯度都计算出来,而tensor就没有这个能力。
也就是说,如果想让一个量参与反向传播,可以用这个。
from torch.autograd import Variable
# Gradient Desent
optimizer.zero_grad()
for i in range(steps):
state = state_pool[i]
action = Variable(torch.FloatTensor([action_pool[i]]))
reward = reward_pool[i]
probs = policy_net(state)
m = Bernoulli(probs)
loss = -m.log_prob(action) * reward # Negtive score function x reward
loss.backward()
optimizer.step()
注意,也许神经网络中并没有包含action,但是我们的神经网络输出的是action的概率,我们要用这个去反向传播,结果action是一个tensor,可能神经网络识别不出来他是Variable,因此不能反向传播求导。
此时我们可以将其变为一个Variable,这样就可以了。
评估动作价值 q t = Q π ( s , a ) q_t = Q_{\pi}(s, a) qt=Qπ(s,a)
在前面的介绍中,我们提到,在Policy Gradient中, q t = Q π ( s , a ) q_t = Q_{\pi}(s, a) qt=Qπ(s,a)并不是用神经网络评估的,而是用其他方法评估的。
一个参考代码:
https://towardsdatascience.com/breaking-down-richard-suttons-policy-gradient-9768602cb63b
参考代码4:实现了batch操作,比较不错的代码,我做了详细注释
这个代码来自
- https://github.com/Finspire13/pytorch-policy-gradient-example/blob/master/pg.py
- Policy Gradient 求解 Cart-Pole问题,实现了batch操作
"""
@ Author: Peter Xiao
@ Date: 2020/7/23
@ Filename: Actor_critic.py
@ Brief: 使用 Actor-Critic算法训练CartPole-v0
网址: https://github.com/Finspire13/pytorch-policy-gradient-example/blob/master/pg.py
"""
"""
这个代码也是实现了policy gradient,并且是用batch来训练的
代码结构和来自书的代码相似
我在代码中加了大量的注释
"""
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.distributions import Bernoulli
from torch.autograd import Variable
from itertools import count
import matplotlib.pyplot as plt
import numpy as np
import gym
import pdb
class PolicyNet(nn.Module):
def __init__(self):
super(PolicyNet, self).__init__()
self.fc1 = nn.Linear(4, 24)
self.fc2 = nn.Linear(24, 36)
self.fc3 = nn.Linear(36, 1) # Prob of Left
""" 这个代码值预测了向左的概率,而不是同时得到输出向左和向右的概率,也是可以的 """
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
# x = F.sigmoid(self.fc3(x)) # 注意 F.sigmoid(self.fc3(x)) 会报警告,但是不报错,是版本的问题
x = torch.sigmoid(self.fc3(x))
return x
def main():
# Plot duration curve:
# From http://pytorch.org/tutorials/intermediate/reinforcement_q_learning.html
"""
这个函数是用来画图的,旨在将每一个episode的平均reward画出来
:return:
"""
episode_ID_set = []
def plot_durations():
plt.figure(2)
plt.clf()
durations_t = torch.FloatTensor(episode_ID)
plt.title('Training...')
plt.xlabel('Episode')
plt.ylabel('Duration')
plt.plot(durations_t.numpy())
# Take 100 episode averages and plot them too
if len(durations_t) >= 100:
means = durations_t.unfold(0, 100, 1).mean(1).view(-1)
means = torch.cat((torch.zeros(99), means))
plt.plot(means.numpy())
plt.pause(0.001) # pause a bit so that plots are updated
"""
设置学习 num_episode = 5000 个会合
batch_size = 5, 每次学习5个episode的transitions
之后的代码中,识别batch,是通过 设置 done = True时候的reward = 0 来识别已经记录的 episode 的个数的
"""
# Parameters
num_episode = 5000
batch_size = 5
learning_rate = 0.01
gamma = 0.99
env = gym.make('CartPole-v0')
policy_net = PolicyNet()
optimizer = torch.optim.RMSprop(policy_net.parameters(), lr=learning_rate)
"""
state_pool. action_pool, reward_pool
都是用于在 reinforce 算法中收集 轨迹 trajectory 对应的 state. action, reward 的
相邻 trajectory 之间,通过设置 reward = 0 来识别,具体方法见下面的注释
"""
# Batch History
state_pool = []
action_pool = [] # 例如 actions = [0, 0, 0, 1, 0, 1, 0, 1, 1, 0, 0, 0, 1, 0, 1] # 1*15个
reward_pool = [] # 例如 rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 0, 1.0, 1.0, 1.0, 1.0, 0, 1.0, 1.0, 1.0, 1.0] # 1*15个, 注意,两个0的位置是区分点,是为了区分不同的trajectory
steps = 0 # 记录所有被记录的 trajectory 一共玩了多少步,其实就等于 reward_pool 的长度
# 开始逐个 episode 学习
for episode_ID in range(num_episode):
state = env.reset()
state = torch.from_numpy(state).float()
state = Variable(state)
# env.render(mode='rgb_array')
env.render()
for t in count():
probs = policy_net(state) # 得到向左的概率
m = Bernoulli(probs) # 根据概率构造分布
action = m.sample() # 根据分布随机抽样得到 action
action = action.data.numpy().astype(int)[0]
next_state, reward, done, _ = env.step(action)
env.render()
# To mark boundarys between episodes
if done:
reward = 0
state_pool.append(state)
action_pool.append(float(action))
reward_pool.append(reward)
state = next_state
state = torch.from_numpy(state).float()
state = Variable(state)
steps += 1
if done:
episode_ID_set.append(t + 1) # 这里是为了画图的
plot_durations() # 画图
break
# -----------在这上面,到 for episode_ID in range(num_episode): 其实就是玩了一局游戏,生成了一个 trajectory
# Update policy
if episode_ID > 0 and episode_ID % batch_size == 0: # 这里,是为了每次收集 batch_size 个 trajectory 的数据
""" 这里是利用收集好的 trajectory 的数据,计算 cumulative_discounted_return """
# Discount reward
cumulative_discounted_return = 0
for i in reversed(range(steps)):
if reward_pool[i] == 0:
cumulative_discounted_return = 0
else:
cumulative_discounted_return = cumulative_discounted_return * gamma + reward_pool[i]
reward_pool[i] = cumulative_discounted_return
""" 这里跟那本书的代码一样,为了避免 cumulative_discounted_return 方差过大,做了标准化,减小训练数据方差 """
# Normalize reward
reward_mean = np.mean(reward_pool)
reward_std = np.std(reward_pool)
for i in range(steps):
reward_pool[i] = (reward_pool[i] - reward_mean) / reward_std
""" 下面就是计算 loss 并且进行 梯度下降了, 注意 loss 等于batch里面所有训练数据的单个样本的loss之和, 另外一个版本代码中也有解释"""
# Gradient Desent
optimizer.zero_grad() # 在求导之前,先把上一步的梯度清零,否则会累加
for i in range(steps):
state = state_pool[i]
action = Variable(torch.FloatTensor([action_pool[i]])) # 这个是那一步采取的动作 (当时是随机采样得到的)
cumulative_discounted_return = reward_pool[i] # 这个就是评估的 q_t
probs = policy_net(state) # 得到概率的预测值
m = Bernoulli(probs) # 得到伯努利分布
loss = -m.log_prob(action) * cumulative_discounted_return # Negtive score function x reward # 计算单个样本的 loss = - log(prob) * U_t
loss.backward() # 这里做 loss.backward() 也是可以的,因为如果梯度不清零,梯度是会自动累加的
# loss.backward() # 也可以在这里统一 loss.backward()
optimizer.step() # 梯度下降,更新参数
state_pool = [] # 清空记忆库
action_pool = [] # 清空记忆库
reward_pool = [] # 清空记忆库
steps = 0 # 清空本轮学习 过程中探索的步数
if __name__ == '__main__':
main()
参考代码5:教材中的代码
教材名称: 【Reinforcement Learning Cookbook Over 60 recipes to design, develop, and deploy self-learning AI models using Python】
页码: pp 262–265
强调:Reinforce算法其实就是一种batch操作。每一次reinforce,生成一个长度为T的轨迹trajectory (这个T是每一局游戏都不一样的,因为不确定多少步结束游戏),因此就相当于有T个transition,我们实际上是基于这T个transition去学习、更新网络。虽然是会合更新,但是其实也是一种batch操作。只不过batch size不固定而已。
'''
代码来自于教材:
> 教材名称: 【Reinforcement Learning Cookbook Over 60 recipes to design, develop, and deploy self-learning AI models using Python】
> 页码: pp 262--265
'''
import gym
import torch
import torch.nn as nn
env = gym.make('CartPole-v0')
class PolicyNetwork():
# Let's start with the __init__method of the PolicyNetwork class, which
# approximates the policy using a neural network:
def __init__(self, n_state, n_action, n_hidden=50, lr=0.001):
self.model = nn.Sequential(
nn.Linear(n_state, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_action),
# nn.Softmax(), # 这个写法在早期的pytorch版本是没有警告的,现在因为其他考虑,要加上有指明dim参数。
nn.Softmax(dim=-1),
)
self.optimizer = torch.optim.Adam(self.model.parameters(), lr)
# 这个loss比较麻烦,就不在这里定义了,在后面会计算
# Next, add the predict method, which computes the estimated policy
def predict(self, s):
"""
Compute the action probabilities of state s using the learning model
@param s: input state
@return: predicted policy,其实就是[left的概率, right的概率]
"""
return self.model(torch.Tensor(s))
# We now develop the training method, which updates the neural network with
# samples collected in an episode:
def update(self, returns, log_probs):
"""
Update the weights of the policy network given the training samples
@param returns: return (cumulative rewards) for each step in an episode
@param log_probs: log probability for each step
Note:
--------
return 是期望总价值的评估,是根据单步immediate reward计算的折扣回报
Example:
如果rewards = [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1] # 1 * 15,是一个做了15次的轨迹
如果gamma = 0.9, 折扣回报计算结果为
returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170, 4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
log_probs: 是每一步执行动作的概率的log值,由于在Policy gradient中,reinforce我们是按照动作概率随机抽样
比如probs=[0.6, 0.4],我们抽样,得到action=0, reward=1,
因此,我们actions.append(action); rewards.append(reward)
并且,我们需要计算抽出的action对应的概率的log,也就是log(0.6)
然后我们 log_probs.append(log(0.6))
就是这样的操作
"""
policy_gradient = []
# 注意:这里policy_gradient是记录整个轨迹中所有transition下的分量loss,最后求和的
# 比如:t=1, 第1个transition,loss_0 = -log_prob[0] * returns[0]
# 比如:t=2, 第2个transition,loss_1 = -log_prob[1] * returns[1]
# 最后求和:loss = loss_0 + loss_1 + ... + loss_T
# 也就是下面的 loss = torch.stack(policy_gradient).sum()
for log_prob, U_t in zip(log_probs, returns):
policy_gradient.append(-log_prob * U_t) # 求轨迹中单个transition的loss
loss = torch.stack(policy_gradient).sum() # 对轨迹中所有transition的loss求和,得到总loss
self.optimizer.zero_grad() # 在求导之前,先将前一步的导数清零,否则会叠加
loss.backward() # 反向传播求出参数的导数
self.optimizer.step() # 梯度下降更新神经网络参数
# 5. The final method for the PolicyNetwork class is get_action, which samples
# an action given a state based on the predicted policy:
def get_action(self, s):
"""
Estimate the policy and sample an action, compute its log probability
@param s: input state
@return: the selected action and log probability
例如:返回 action = 0, log_prob = log(0.6)
"""
probs = self.predict(torch.Tensor(s))
action = torch.multinomial(input=probs, num_samples=1).item() #随机抽样 其中probs就是抽样的权重
# torch.multinomial(probs, 1).item() 是随机抽样,probs是权重,1是抽样的个数
log_prob = torch.log(probs[action]) #如果 action = 0, 则 torch.log(probs[action]) torch.log(probs[0]) = log (向左的概率)
return action, log_prob
# It also returns the log probability of the selected action, which will be used as part of the training sample
# Now, we can move on to developing the REINFORCE algorithm with a policy network model:
def reinforce(env, policy_net, n_episode, gamma=1.0):
"""
REINFORCE algorithm
@param env: Gym environment
@param estimator: policy network
@param n_episode: number of episodes
@param gamma: the discount factor
"""
for episode in range(n_episode):
log_probs = [] # 必须要,计算loss以及梯度下降用得到
rewards = [] # 必须要,计算折扣回报returns以及梯度下降用得到
actions = [] # 可删去,放在这里是为了debug方便
states = [] # 可删去,放在这里是为了debug方便
state = env.reset()
states.append(state) # 可删去,放在这里是为了debug方便
while True:
action, log_prob = policy_net.get_action(state)
next_state, reward, is_done, _ = env.step(action)
# if(is_done == True):
# print('DONE') # 这个是为了调试用的,看一个episode
total_reward_episode[episode] += reward # total_reward_episode里面一个元素代表一个轨迹的总reward,主要是用来看看目前模型效果如何了
log_probs.append(log_prob) # 例如 log_probs = [-0.5651,-0.5807,-0.5959,-0.8173,-0.5932,-0.8210,-0.5895,-0.8286,-0.8165,-0.5679,-0.5757,-0.5504,-0.9293,-0.5300,-0.9650]
rewards.append(reward) # 例如rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] # 1*15个
actions.append(action) # 例如actions = [0, 0, 0, 1, 0, 1, 0, 1, 1, 0, 0, 0, 1, 0, 1] # 1*15个
"""
is_done == True
这说明一个episode结束了,我们记录了一个轨迹的信息,接下来就是REINFORCE来计算评估的 u_t了
这种方法是用一个轨迹去估计,这是一个无偏估计,是蒙特卡洛近似
这里,其实只需要整个轨迹的reward,以及相应的 log_probs即可。例如
rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] # 1*15个
log_probs = [tensor(-0.5651, grad_fn=<LogBackward>),
tensor(-0.5807, grad_fn=<LogBackward>),
tensor(-0.5959, grad_fn=<LogBackward>),
tensor(-0.8173, grad_fn=<LogBackward>),
tensor(-0.5932, grad_fn=<LogBackward>),
tensor(-0.8210, grad_fn=<LogBackward>),
tensor(-0.5895, grad_fn=<LogBackward>),
tensor(-0.8286, grad_fn=<LogBackward>),
tensor(-0.8165, grad_fn=<LogBackward>),
tensor(-0.5679, grad_fn=<LogBackward>),
tensor(-0.5757, grad_fn=<LogBackward>),
tensor(-0.5504, grad_fn=<LogBackward>),
tensor(-0.9293, grad_fn=<LogBackward>),
tensor(-0.5300, grad_fn=<LogBackward>),
tensor(-0.9650, grad_fn=<LogBackward>)] # 1*15个
"""
if is_done: # 这说明一个episode结束了
returns = []
U_t = 0
gamma_pow = 0
for reward in rewards[::-1]: # 就是从后往前循环,计算u_T, u_{T-1}, ...., u_1
U_t += gamma ** gamma_pow * reward # U_t = sum (gamma_pow * reward_t), 也就是我的笔记中的公式
gamma_pow += 1
returns.append(U_t) # 这里是append,因此计算完之后是反着的,之后需要倒过来
returns = returns[::-1] # 由于之前的计算append的,是反着的,因此我们将其倒过来即可
returns = torch.tensor(returns)
# 例如 returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170,
# 4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
""" 将 returns 标准化,避免方差过大 """
returns = (returns - returns.mean()) / (returns.std() + 1e-9)
# 例如标准化后 returns = tensor([ 1.2303, 1.1263, 1.0107, 0.8823, 0.7396, 0.5810, 0.4049, 0.2092,
# -0.0083, -0.2500, -0.5185, -0.8168, -1.1483, -1.5166, -1.9258])
policy_net.update(returns, log_probs)
print('Episode: {}, total reward: {}'.format(episode, total_reward_episode[episode]))
break
states.append(next_state)
state = next_state
# 7. We specify the size of the policy network (input, hidden, and output layers), the
# learning rate, and then create a PolicyNetwork instance accordingly:
n_state = env.observation_space.shape[0]
n_action = env.action_space.n
n_hidden = 128
lr = 0.003
policy_net = PolicyNetwork(n_state, n_action, n_hidden, lr)
gamma = 0.9 # We set the discount factor as 0.9:
# 8. We perform learning with the REINFORCE algorithm using the policy network
# we just developed for 500 episodes, and we also keep track of the total rewards
# for each episode:
n_episode = 500
total_reward_episode = [0] * n_episode
reinforce(env, policy_net, n_episode, gamma)
# 9. Let's now display the plot of episode reward over time:
import matplotlib.pyplot as plt
plt.plot(total_reward_episode)
plt.title('Episode reward over time')
plt.xlabel('Episode')
plt.ylabel('Total reward')
plt.show()
警告信息
这里有几处会警告 :
def __init__(self, n_state, n_action, n_hidden=50,lr=0.001):
self.model = nn.Sequential(
nn.Linear(n_state, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_action),
nn.Softmax(),
)
...
...
probs = self.predict(torch.Tensor(s))
警告信息UserWarning: Implicit dimension choice for softmax has been deprecated. Change the call to include dim=X as an argument. input = module(input)
这个是因为:
这个警告的原因是softmax()函数已经被弃用了,虽然程序还是可以运行成功,但是这个做法不被pytorch所赞成。
这个写法在早期的pytorch版本是没有警告的,现在因为其他考虑,要加上有指明dim参数。
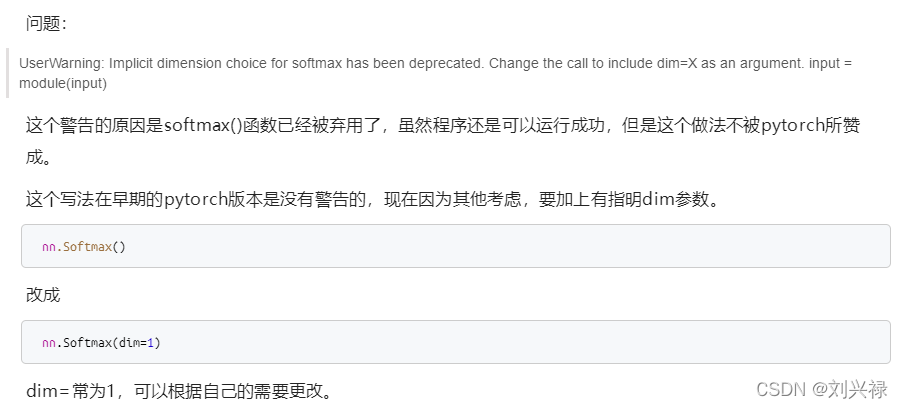
我们直接改为dim=-1即可,也就是
def __init__(self, n_state, n_action, n_hidden=50, lr=0.001):
self.model = nn.Sequential(
nn.Linear(n_state, n_hidden),
nn.ReLU(),
nn.Linear(n_hidden, n_action),
# nn.Softmax(), # 这个写法在早期的pytorch版本是没有警告的,现在因为其他考虑,要加上有指明dim参数。
nn.Softmax(dim=-1),
)
self.optimizer = torch.optim.Adam(self.model.parameters(), lr)
# 这个loss比较麻烦,就不在这里定义了,在后面会计算
代码详解: reinforce函数剖析
- 注意,这个函数里直接把梯度下降迭代也都完成了。
强调:Reinforce算法其实就是一种batch操作。每一次reinforce,生成一个长度为T的轨迹trajectory (这个T是每一局游戏都不一样的,因为不确定多少步结束游戏),因此就相当于有T个transition,我们实际上是基于这T个transition去学习、更新网络。虽然是会合更新,但是其实也是一种batch操作。只不过batch size不固定而已。
# Now, we can move on to developing the REINFORCE algorithm with a policy network model:
def reinforce(env, policy_net, n_episode, gamma=1.0):
"""
REINFORCE algorithm
@param env: Gym environment
@param estimator: policy network
@param n_episode: number of episodes
@param gamma: the discount factor
"""
for episode in range(n_episode):
log_probs = [] # 必须要,计算loss以及梯度下降用得到
rewards = [] # 必须要,计算折扣回报returns以及梯度下降用得到
actions = [] # 可删去,放在这里是为了debug方便
states = [] # 可删去,放在这里是为了debug方便
state = env.reset()
states.append(state) # 可删去,放在这里是为了debug方便
while True:
action, log_prob = policy_net.get_action(state)
next_state, reward, is_done, _ = env.step(action)
# if(is_done == True):
# print('DONE') # 这个是为了调试用的,看一个episode
total_reward_episode[episode] += reward # total_reward_episode里面一个元素代表一个轨迹的总reward,主要是用来看看目前模型效果如何了
log_probs.append(log_prob) # 例如 log_probs = [-0.5651,-0.5807,-0.5959,-0.8173,-0.5932,-0.8210,-0.5895,-0.8286,-0.8165,-0.5679,-0.5757,-0.5504,-0.9293,-0.5300,-0.9650]
rewards.append(reward) # 例如rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] # 1*15个
actions.append(action) # 例如actions = [0, 0, 0, 1, 0, 1, 0, 1, 1, 0, 0, 0, 1, 0, 1] # 1*15个
"""
is_done == True
这说明一个episode结束了,我们记录了一个轨迹的信息,接下来就是REINFORCE来计算评估的 u_t了
这种方法是用一个轨迹去估计,这是一个无偏估计,是蒙特卡洛近似
这里,其实只需要整个轨迹的reward,以及相应的 log_probs即可。例如
rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] # 1*15个
log_probs = [tensor(-0.5651, grad_fn=<LogBackward>),
tensor(-0.5807, grad_fn=<LogBackward>),
tensor(-0.5959, grad_fn=<LogBackward>),
tensor(-0.8173, grad_fn=<LogBackward>),
tensor(-0.5932, grad_fn=<LogBackward>),
tensor(-0.8210, grad_fn=<LogBackward>),
tensor(-0.5895, grad_fn=<LogBackward>),
tensor(-0.8286, grad_fn=<LogBackward>),
tensor(-0.8165, grad_fn=<LogBackward>),
tensor(-0.5679, grad_fn=<LogBackward>),
tensor(-0.5757, grad_fn=<LogBackward>),
tensor(-0.5504, grad_fn=<LogBackward>),
tensor(-0.9293, grad_fn=<LogBackward>),
tensor(-0.5300, grad_fn=<LogBackward>),
tensor(-0.9650, grad_fn=<LogBackward>)] # 1*15个
"""
if is_done: # 这说明一个episode结束了
returns = []
U_t = 0
gamma_pow = 0
for reward in rewards[::-1]: # 就是从后往前循环,计算u_T, u_{T-1}, ...., u_1
U_t += gamma ** gamma_pow * reward # U_t = sum (gamma_pow * reward_t), 也就是我的笔记中的公式
gamma_pow += 1
returns.append(U_t) # 这里是append,因此计算完之后是反着的,之后需要倒过来
returns = returns[::-1] # 由于之前的计算append的,是反着的,因此我们将其倒过来即可
returns = torch.tensor(returns)
# 例如 returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170,
# 4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
""" 将 returns 标准化,避免方差过大 """
returns = (returns - returns.mean()) / (returns.std() + 1e-9)
# 例如标准化后 returns = tensor([ 1.2303, 1.1263, 1.0107, 0.8823, 0.7396, 0.5810, 0.4049, 0.2092,
# -0.0083, -0.2500, -0.5185, -0.8168, -1.1483, -1.5166, -1.9258])
policy_net.update(returns, log_probs)
print('Episode: {}, total reward: {}'.format(episode, total_reward_episode[episode]))
break
states.append(next_state)
state = next_state
episode: 一整轮游戏- 我们debug,一整轮游戏后,
is_done变为True,我们将这轮的轨迹: s 1 , a 1 , r 1 , s 2 , a 2 , r 2 , s 3 , a 3 , r 3 , ⋯ , s T , a T , r T s_1, a_1, r_1, s_2, a_2, r_2, s_3, a_3, r_3, \cdots, s_T, a_T, r_T s1,a1,r1,s2,a2,r2,s3,a3,r3,⋯,sT,aT,rT,对应产生的log_probs和rewards拿出来看一下:
强调:Reinforce算法其实就是一种batch操作。每一次reinforce,生成一个长度为T的轨迹trajectory (这个T是每一局游戏都不一样的,因为不确定多少步结束游戏),因此就相当于有T个transition,我们实际上是基于这T个transition去学习、更新网络。虽然是会合更新,但是其实也是一种batch操作。只不过batch size不固定而已。
states =
[array([ 0.04387178, -0.01202765, -0.00428936, 0.03030406], dtype=float32),
array([ 0.04363123, -0.20708783, -0.00368328, 0.32163057], dtype=float32),
array([ 0.03948947, -0.40215713, 0.00274934, 0.61314964], dtype=float32),
array([ 0.03144633, -0.5973174 , 0.01501233, 0.9066973 ], dtype=float32),
array([ 0.01949998, -0.4024019 , 0.03314627, 0.6187704 ], dtype=float32),
array([ 0.01145194, -0.5979708 , 0.04552168, 0.9217058 ], dtype=float32),
array([-5.0747546e-04, -4.0349251e-01, 6.3955799e-02, 6.4366937e-01],dtype=float32),
array([-0.00857733, -0.59944475, 0.07682919, 0.955787 ], dtype=float32),
array([-0.02056622, -0.40543556, 0.09594493, 0.68819726], dtype=float32),
array([-0.02867493, -0.21176696, 0.10970887, 0.42719495], dtype=float32),
array([-0.03291027, -0.40825784, 0.11825277, 0.7523491 ], dtype=float32),
array([-0.04107543, -0.6047946 , 0.13329975, 1.0797808 ], dtype=float32),
array([-0.05317132, -0.8014005 , 0.15489537, 1.4111475 ], dtype=float32),
array([-0.06919933, -0.6085008 , 0.18311831, 1.1706195 ], dtype=float32),
array([-0.08136935, -0.8054693 , 0.2065307 , 1.5146688 ], dtype=float32)] # 4*15个
actions = [0, 0, 0, 1, 0, 1, 0, 1, 1, 0, 0, 0, 1, 0, 1] # 1*15个
rewards = [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] # 1*15个
log_probs = [tensor(-0.5651, grad_fn=<LogBackward>),
tensor(-0.5807, grad_fn=<LogBackward>),
tensor(-0.5959, grad_fn=<LogBackward>),
tensor(-0.8173, grad_fn=<LogBackward>),
tensor(-0.5932, grad_fn=<LogBackward>),
tensor(-0.8210, grad_fn=<LogBackward>),
tensor(-0.5895, grad_fn=<LogBackward>),
tensor(-0.8286, grad_fn=<LogBackward>),
tensor(-0.8165, grad_fn=<LogBackward>),
tensor(-0.5679, grad_fn=<LogBackward>),
tensor(-0.5757, grad_fn=<LogBackward>),
tensor(-0.5504, grad_fn=<LogBackward>),
tensor(-0.9293, grad_fn=<LogBackward>),
tensor(-0.5300, grad_fn=<LogBackward>),
tensor(-0.9650, grad_fn=<LogBackward>)] # 1*15个
可以看到:这相当于是选了一个batch size = 15的 batch,一次学习这一个batch,然后做一次参数更新。
这个log_probs 的计算方法是:
- 先以神经网络经过softmax输出的概率, 比如
probs = self.predict(torch.Tensor(s)) = [0.6, 0.4],我们根据这个概率分布随机抽样出一个action,比如action = 0- 我们提取出
action = 0对应的概率为0.6,我们取其对数 log ( 0.6 ) \log (0.6) log(0.6),这样就得到了一次的log_prob = log (0.6)- 由于这一个回合(
episode)进行了15步,那就又15个log_prob,因此log_prob就是1*15的,如上面展示的一样。
由于我们的策略梯度的公式是
- 第1种:
对每个动作a求和的形式: ∂ V ( s ; θ ) ∂ θ = ∑ a ∈ A ∂ π ( a ∣ s ; θ ) ∂ θ ⋅ Q π ( s , a ) \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}}=\sum_{a \in \mathcal{A}}\frac{ \partial \pi(a|s; \theta)}{ \partial{\theta} } \cdot Q_{\pi}(s, a) \end{aligned} ∂θ∂V(s;θ)=a∈A∑∂θ∂π(a∣s;θ)⋅Qπ(s,a)
这种形式适用于离散动作的情况,因为得对所有动作 a a a都求导然后加和。- 第2种: ∂ V ( s ; θ ) ∂ θ = E A ∼ π ( ⋅ ∣ s ; θ ) [ ∂ log π ( A ∣ s ; θ ) ∂ θ ⋅ Q π ( s , A ) ] \begin{aligned} \frac{\partial{V(s; \theta)}}{\partial{\theta}} =\mathbb{E}_{A\sim \pi(\cdot|s;\theta)}\left[ \frac{\partial \log \pi (A|s;\theta )}{\partial \theta}\cdot Q_{\pi}(s,A) \right] \end{aligned} ∂θ∂V(s;θ)=EA∼π(⋅∣s;θ)[∂θ∂logπ(A∣s;θ)⋅Qπ(s,A)]
方法1:REINFORCE
- 我们让agent玩一局游戏,并且记录状态、动作、奖励的轨迹,也就是记录 s 1 , a 1 , r 1 , s 2 , a 2 , r 2 , ⋯ , s T , a T , r T . s_1, a_1, r_1, s_2, a_2, r_2, \cdots, s_T, a_T, r_T. s1,a1,r1,s2,a2,r2,⋯,sT,aT,rT.
其中, T T T是最大的尝试次数,为了避免游戏一直结束不了。- 我们基于这个轨迹计算,对所有 t t t,也就是 ∀ t ∈ T \forall t \in T ∀t∈T计算其折扣回报 u t = ∑ k = t T γ k − t r k u_t = \sum_{k=t}^{T}\gamma^{k-t} r_k ut=k=t∑Tγk−trk
- 我们用 u t u_t ut去近似 Q ( s t , a t ) Q(s_t, a_t) Q(st,at),也就是令 q t = u t q_t = u_t qt=ut。这是因为 Q π ( s t , a t ) = E [ U t ] Q_{\pi}(s_t, a_t) = \mathbb{E}[U_t] Qπ(st,at)=E[Ut],因此,我们可以用随机变量 U t U_t Ut的一个实现值 u t u_t ut去评估 Q ( s t , a t ) Q(s_t, a_t) Q(st,at),这也是无偏估计。
这也就是所谓的REINFORCE算法。
因此,我们来进行下面的操作:
∀ t ∈ T \forall t \in T ∀t∈T计算其折扣回报 u t = ∑ k = t T γ k − t r k u_t = \sum_{k=t}^{T}\gamma^{k-t} r_k ut=k=t∑Tγk−trk
代码中就是 (代码中为了避免折扣回报returns差别过大,导致收敛缓慢,特意做了标准化)
if is_done: # 这说明一个episode结束了
returns = []
U_t = 0
gamma_pow = 0
for reward in rewards[::-1]: # 就是从后往前循环,计算u_T, u_{T-1}, ...., u_1
U_t += gamma ** gamma_pow * reward # U_t = sum (gamma_pow * reward_t), 也就是我的笔记中的公式
gamma_pow += 1
returns.append(U_t) # 这里是append,因此计算完之后是反着的,之后需要倒过来
returns = returns[::-1] # 由于之前的计算append的,是反着的,因此我们将其倒过来即可
returns = torch.tensor(returns)
# 例如 returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170,
# 4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
""" 将 returns 标准化,避免方差过大 """
returns = (returns - returns.mean()) / (returns.std() + 1e-9)
# 例如标准化后 returns = tensor([ 1.2303, 1.1263, 1.0107, 0.8823, 0.7396, 0.5810, 0.4049, 0.2092,
# -0.0083, -0.2500, -0.5185, -0.8168, -1.1483, -1.5166, -1.9258])
最后的结果就是,15个时间点的 u t , ∀ t = 1 , 2 , ⋯ , 15 u_t, \forall t=1, 2, \cdots, 15 ut,∀t=1,2,⋯,15如下
returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170,
4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
由于之后的return可能会误差很大,因此我们将其标准化
returns = (returns - returns.mean()) / (returns.std() + 1e-9)
returns = tensor([ 1.2303, 1.1263, 1.0107, 0.8823, 0.7396, 0.5810, 0.4049, 0.2092,
-0.0083, -0.2500, -0.5185, -0.8168, -1.1483, -1.5166, -1.9258])
计算完了
u
t
u_t
ut,我们就完成了动作价值
Q
(
s
,
a
)
Q(s, a)
Q(s,a)的评估 (也就是我们已经用REINFORCE算法评估好了
u
t
u_t
ut),我们此时就要去计算策略梯度,然后更新网络参数了。我们进入update函数。
# We now develop the training method, which updates the neural network with
# samples collected in an episode:
def update(self, returns, log_probs):
"""
Update the weights of the policy network given the training samples
@param returns: return (cumulative rewards) for each step in an episode
@param log_probs: log probability for each step
Note:
--------
return 是期望总价值的评估,是根据单步immediate reward计算的折扣回报
Example:
如果rewards = [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1] # 1 * 15,是一个做了15次的轨迹
如果gamma = 0.9, 折扣回报计算结果为
returns = tensor([7.9411, 7.7123, 7.4581, 7.1757, 6.8619, 6.5132, 6.1258, 5.6953, 5.2170, 4.6856, 4.0951, 3.4390, 2.7100, 1.9000, 1.0000])
log_probs: 是每一步执行动作的概率的log值,由于在Policy gradient中,reinforce我们是按照动作概率随机抽样
比如probs=[0.6, 0.4],我们抽样,得到action=0, reward=1,
因此,我们actions.append(action); rewards.append(reward)
并且,我们需要计算抽出的action对应的概率的log,也就是log(0.6)
然后我们 log_probs.append(log(0.6))
就是这样的操作
"""
policy_gradient = []
# 注意:这里policy_gradient是记录整个轨迹中所有transition下的分量loss,最后求和的
# 比如:t=1, 第1个transition,loss_0 = -log_prob[0] * returns[0]
# 比如:t=2, 第2个transition,loss_1 = -log_prob[1] * returns[1]
# 最后求和:loss = loss_0 + loss_1 + ... + loss_T
# 也就是下面的 loss = torch.stack(policy_gradient).sum()
for log_prob, U_t in zip(log_probs, returns):
policy_gradient.append(-log_prob * U_t) # 求轨迹中单个transition的loss
loss = torch.stack(policy_gradient).sum() # 对轨迹中所有transition的loss求和,得到总loss
self.optimizer.zero_grad() # 在求导之前,先将前一步的导数清零,否则会叠加
loss.backward() # 反向传播求出参数的导数
self.optimizer.step() # 梯度下降更新神经网络参数
这里
log_probs = [tensor(-0.4983, grad_fn=<LogBackward>),
tensor(-0.5083, grad_fn=<LogBackward>),
tensor(-0.5101, grad_fn=<LogBackward>),
tensor(-0.4873, grad_fn=<LogBackward>),
tensor(-0.4430, grad_fn=<LogBackward>),
tensor(-1.1343, grad_fn=<LogBackward>),
tensor(-1.0506, grad_fn=<LogBackward>),
tensor(-0.4643, grad_fn=<LogBackward>),
tensor(-1.0850, grad_fn=<LogBackward>),
tensor(-0.4437, grad_fn=<LogBackward>)]
# 经过标准化的returns如下
returns = tensor([ 1.2825, 1.0733, 0.8409, 0.5826, 0.2956, -0.0232, -0.3775, -0.7711,
-1.2085, -1.6945])
由于我们要做梯度上升,因此要把loss变成
- 设置策略网络的
loss function为:
loss function = ( ≈ ) − [ log π ( a ^ ∣ s ; θ ) ] ⋅ q t \begin{aligned} \text{loss function} = (\approx ) -\left[\log \pi (\hat{a}|s;\theta ) \right]\cdot q_t \end{aligned} loss function=(≈)−[logπ(a^∣s;θ)]⋅qt
代码中就是
for log_prob, U_t in zip(log_probs, returns):
policy_gradient.append(-log_prob * U_t) # 求轨迹中单个transition的loss
这一步操作之后,变成了
policy_gradient = [tensor(0.6391, grad_fn=<MulBackward0>),
tensor(0.5456, grad_fn=<MulBackward0>),
tensor(0.4289, grad_fn=<MulBackward0>),
tensor(0.2839, grad_fn=<MulBackward0>),
tensor(0.1310, grad_fn=<MulBackward0>),
tensor(-0.0263, grad_fn=<MulBackward0>),
tensor(-0.3966, grad_fn=<MulBackward0>),
tensor(-0.3580, grad_fn=<MulBackward0>),
tensor(-1.3112, grad_fn=<MulBackward0>),
tensor(-0.7518, grad_fn=<MulBackward0>)]
其中,比如说第一个
0.6391
=
−
(
−
0.4983
×
1.2825
)
=
0.6391
=
−
[
log
π
(
a
^
1
=
1
∣
s
1
;
θ
)
]
⋅
u
1
0.6391 = -(-0.4983 \times 1.2825) = 0.6391 = -\left[\log \pi (\hat{a}_1 = 1|s_1;\theta ) \right]\cdot u_1
0.6391=−(−0.4983×1.2825)=0.6391=−[logπ(a^1=1∣s1;θ)]⋅u1
这里
a
^
1
=
1
\hat{a}_1 = 1
a^1=1是我举的一个例子,这个
a
^
1
=
1
\hat{a}_1 = 1
a^1=1是在REINFORCE中在一轮游戏中,在
t
=
1
t=1
t=1时刻,根据策略网络的输出概率(比如[0.52, 0.48],随机抽样抽出来,得到
a
^
1
=
1
\hat{a}_1 = 1
a^1=1)。
另外,我们是对所有的这理论游戏中的时间点 t = 1 , 2 , 3 , ⋯ , T t=1,2,3,\cdots, T t=1,2,3,⋯,T,都计算一下策略梯度。
然后我们最终的loss需要设置成,这一个轨迹中,所有步的loss的总和要最小化。
也就是代码中的
loss = torch.stack(policy_gradient).sum() # 对轨迹中所有transition的loss求和,得到总loss
这里的逻辑是这样的,我们在一轮游戏中,执行了15个动作,然后我们的 u t u_t ut也是评估了15次。这15次,每次都预测的很准,那说明策略很准。这个指标可以用这15次动作的误差的总和来衡量(就是一个标量,
相当于当前目标函数值)。我们是想其越小越好。因此loss最终就等于这一个轨迹中所有时间节点上的policy loss的总和,也就是
total loss function = ( ≈ ) ∑ t = 1 T − [ log π ( a ^ t ∣ s t ; θ ) ] ⋅ u t \begin{aligned} \text{total loss function} = (\approx ) \sum_{t=1}^{T}-\left[\log \pi (\hat{a}_t|s_t;\theta ) \right]\cdot u_t \end{aligned} total loss function=(≈)t=1∑T−[logπ(a^t∣st;θ)]⋅ut
在本例中,
total loss function = 0.6391 + 0.5456 + 0.4289 + 0.2839 + 0.1310 + ( − 0.0263 ) + ( − 0.3966 ) + ( − 0.3580 ) + ( − 1.3112 ) + ( − 0.7518 ) = − 0.8155 \begin{aligned} \text{total loss function} &= 0.6391 + 0.5456 + 0.4289 + 0.2839 + 0.1310 + ( -0.0263) + (-0.3966) + (-0.3580) + (-1.3112) + (-0.7518) &\\ = -0.8155 \end{aligned} total loss function=−0.8155=0.6391+0.5456+0.4289+0.2839+0.1310+(−0.0263)+(−0.3966)+(−0.3580)+(−1.3112)+(−0.7518)
代码执行结果也是如此
loss = torch.stack(policy_gradient).sum() # 对轨迹中所有transition的loss求和,得到总loss
loss = tensor(-0.8155, grad_fn=<SumBackward0>)
然后,执行梯度下降 (对应原问题中的梯度上升,因为我们加了负号)
self.optimizer.zero_grad() # 在求导之前,先将前一步的导数清零,否则会叠加
loss.backward() # 反向传播求出参数的导数
self.optimizer.step() # 梯度下降更新神经网络参数
书中也有这部分介绍,可以看到,如果轨迹的长度为 T T T,我们策略梯度就可以是对所有时间节点 t t t的 − [ log π ( a ^ t ∣ s t ; θ ) ] ⋅ u t -\left[\log \pi (\hat{a}_t|s_t;\theta ) \right]\cdot u_t −[logπ(a^t∣st;θ)]⋅ut的求和,也就是 Δ θ = α ∑ t = 1 T ∇ log π ( a t ∣ s t ) ⋅ G t \Delta\theta = \alpha \sum_{t=1}^{T} \nabla \log \pi(a_t|s_t) \cdot G_t Δθ=αt=1∑T∇logπ(at∣st)⋅Gt。跟上述总结的也是一致的。
作者:刘兴禄,清华大学,博士在读















 480
480











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









